Tock OS Book
 This book introduces you to Tock, a secure embedded operating system for sensor
networks and the Internet of Things. Tock is the first operating system to allow
multiple untrusted applications to run concurrently on a microcontroller-based
computer. The Tock kernel is written in Rust, a memory-safe systems language
that does not rely on a garbage collector. Userspace applications are run in
single-threaded processes that can be written in any language.
This book introduces you to Tock, a secure embedded operating system for sensor
networks and the Internet of Things. Tock is the first operating system to allow
multiple untrusted applications to run concurrently on a microcontroller-based
computer. The Tock kernel is written in Rust, a memory-safe systems language
that does not rely on a garbage collector. Userspace applications are run in
single-threaded processes that can be written in any language.
Getting Started
The book includes a quick start guide.
Tock Workshop Courses
For a more in-depth walkthough-style less, look here.
Development Guides
The book also has walkthoughs on how to implement different features in Tock OS.
Getting Started
This getting started guide covers how to get started using Tock.
Hardware
To really be able to use Tock and get a feel for the operating system, you will need a hardware platform that tock supports. The TockOS Hardware includes a list of supported hardware boards. You can also view the boards folder to see what platforms are supported.
As of February 2021, this getting started guide is based around five hardware
platforms. Steps for each of these platforms are explicitly described here.
Other platforms will work for Tock, but you may need to reference the README
files in tock/boards/ for specific setup information. The five boards are:
- Hail
- imix
- nRF52840dk (PCA10056)
- Arduino Nano 33 BLE (regular or Sense version)
- BBC Micro:bit v2
These boards are reasonably well supported, but note that others in Tock may have some "quirks" around what is implemented (or not), and exactly how to load code and test that it is working. This guides tries to be general, and Tock generally tries to follow a certain convention, but the project is under active development and new boards are added rapidly. You should definitely consult the board-specific README to see if there are any board-specific details you should be aware of.
When you are ready to use your board, see the hardware setup guide for information on any needed setup to get the board working with your machine.
Software
Tock, like many computing systems, is split between a kernel and userspace apps. These are developed, compiled, and loaded separately.
First, complete the quickstart guide to get all of the necessary tools installed.
The kernel is available in the Tock repository. See here for information on getting started.
Userspace apps are compiled and loaded separately from the kernel. You can install one or more apps without having to update or re-flash the kernel. See here for information on getting started.
Quickstart
Get started with Tock quickly! The general requirements are:
- Rustup
- Tockloader
- GCC toolchains for ARM and RISC-V
- Code loading tool
Choose the guide for your platform:
Quickstart: Mac
This guide assumes you have the Homebrew package manager installed.
Install the following:
-
Command line utilities.
$ brew install wget pipx git coreutils -
Clone the Tock kernel repository.
$ git clone https://github.com/tock/tock -
rustup. This tool helps manage installations of the Rust compiler and related tools.
$ curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh -
arm-none-eabi toolchain and riscv64-unknown-elf toolchains. This enables you to compile apps written in C.
$ brew install arm-none-eabi-gcc riscv64-elf-gcc -
tockloader. This is an all-in-one tool for programming boards and using Tock.
$ pipx install tockloaderNote: You may need to add
tockloaderto your path. If you cannot run it after installation, run the following:$ pipx ensurepath -
JLinkExeto load code onto your board.JLinkis available from the Segger website. You want to install the "J-Link Software and Documentation Pack". There are various packages available depending on operating system. -
OpenOCD. Another tool to load code. You can install through package managers.
$ brew install open-ocd
Quickstart: Linux
Install the following:
-
Command line utilities.
$ sudo apt install git wget zip curl python3 python3-pip python3-venv -
Clone the Tock kernel repository.
$ git clone https://github.com/tock/tock -
rustup. This tool helps manage installations of the Rust compiler and related tools.
$ curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh -
arm-none-eabi toolchain and riscv64-unknown-elf toolchains. This enables you to compile apps written in C.
$ sudo apt install gcc-arm-none-eabi gcc-riscv64-unknown-elf -
tockloader. This is an all-in-one tool for programming boards and using Tock.
$ pipx install tockloaderNote: You may need to add
tockloaderto your path. If you cannot run it after installation, run the following:$ pipx ensurepath -
JLinkExeto load code onto your board.JLinkis available from the Segger website. You want to install the "J-Link Software and Documentation Pack". There are various packages available depending on operating system. -
OpenOCD. Another tool to load code. You can install through package managers.
$ sudo apt install openocd
One-Time Fixups
On Linux, you might need to give your user access to the serial port used by the board. If you get permission errors or you cannot access the serial port, this is likely the issue.
You can fix this by setting up a udev rule to set the permissions correctly for the serial device when it is attached. You only need to run the command below for your specific board, but if you don't know which one to use, running both is totally fine, and will set things up in case you get a different hardware board!
$ sudo bash -c "echo 'ATTRS{idVendor}==\"0403\", ATTRS{idProduct}==\"6015\", MODE=\"0666\"' > /etc/udev/rules.d/99-ftdi.rules" $ sudo bash -c "echo 'ATTRS{idVendor}==\"2341\", ATTRS{idProduct}==\"005a\", MODE=\"0666\"' > /etc/udev/rules.d/98-arduino.rules"Afterwards, detach and re-attach the board to reload the rule.
Quickstart: Windows
Note: This is a work in progress. Any contributions are welcome!
We use WSL on Windows for Tock.
Install Tools
Configure WSL To Use USB
On Windows Subsystem for Linux (WSL)
Programming JLink devices with Tock in WSL:
Trying to program an nRF52840DK with WSL can be a little tricky because WSL abstracts away low level access for USB devices. WSL1 does not offer access to physical hardware, just an environment to use linux on microsoft. WSL2 on the other hand is unable to find JLink devices even if you have JLink installed because of the USB abstraction. To get around this limitation, we use USBIP - a tool that connects the USB device over a TCP tunnel.
This guide might apply for any device programmed via JLink.
Steps to connect to nRF52840DK with WSL:
-
Get Ubuntu 22.04 from Microsoft store. Install it as a WSL distro with
wsl --install -d Ubuntu-22.04using Windows Powershell or Cmd prompt with admin privileges. -
Once Ubuntu 22.04 is installed, the Ubuntu 20.04 distro that ships as default with WSL must be uninstalled. Set the 22.04 distro as the WSL default by with the
wsl --setdefault Ubuntu-22.04command. -
Install JLink's linux package from their website on your WSL linux distro. You may need to modify jlink rules to allow JLink to access the nRF52840DK. This can be done with
sudo nano /etc/udev/rules.d/99-jlink.rulesand addingSUBSYSTEM=="tty", ATTRS{idVendor}=="1051", MODE="0666", GROUP="dialout"to the file. -
Next, the udev rules have to be reloaded and triggered with
sudo udevadm control --reload-rules && udevadm trigger. Doing this should apply the new rules. -
On the windows platform, make sure WSL is set to version 2. Check the WSL version with
wsl -l -v. If it is version 1, change it to WSL2 withwsl --set-version Ubuntu-22.04 2(USBIP works with WSL2). -
Install USBIP from here. Version 4.x onwards removes USBIP tooling requirement from the client side, so you don't have to install anything on the linux subsystem.
-
On windows, open powershell/cmd in admin mode and run
usbipd wsl list. That should give you the list of devices. Note the Bus ID of your J-Link device. -
For the first time that you want to attach your device, you need to bind the bus between the host OS and the WSL using
usbipd bind -b <bus-id>. -
Once bound, you can attach your device to WSL by running
usbipd attach --wsl -b <busid>on powershell/cmd (When attaching a device for the first time, it has to be done with admin privileges). -
To check if the attach worked, run
lsusbon WSL. If it worked, the device should be listed asSEGGER JLink. -
The kernel can now be flashed with
make installand other tockloader commands should work.
Note:
- A machine with an x64 processor is required. (x86 and Arm64 are currently not supported with USBIP).
- Make sure your firewall is not blocking port 3240 as USBIP uses that port to interface windows and WSL. (Windows defender is usually the culprit if you don't have a third party firewall).
- Add an inbound rule to Windows defender/ your third party firewall allowing USBIP to use port 3240 if you see a port blocked error.
One-Time Fixups
The serial device parameters stored in the FTDI chip do not seem to get passed to Ubuntu. Plus, WSL enumerates every possible serial device. Therefore, tockloader cannot automatically guess which serial port is the correct one, and there are a lot to choose from.
You will need to open Device Manager on Windows, and find which
COMport the tock board is using. It will likely be called "USB Serial Port" and be listed as an FTDI device. The COM number will match what is used in WSL. For example,COM9is/dev/ttyS9on WSL.To use tockloader you should be able to specify the port manually. For example:
tockloader --port /dev/ttyS9 list.
Getting the Hardware Connected and Setup
Plug your hardware board into your computer. Generally this requires a micro USB cable, but your board may be different.
Note! Some boards have multiple USB ports.
Some boards have two USB ports, where one is generally for debugging, and the other allows the board to act as any USB peripheral. You will want to connect using the "debug" port.
Some example boards:
- imix: Use the port labeled
DEBUG.- nRF52 development boards: Use the port on the skinny side of the board (do NOT use the port labeled "nRF USB").
The board should appear as a regular serial device (e.g.
/dev/tty.usbserial-c098e5130006 on my Mac or /dev/ttyUSB0 on my Linux box).
On Linux, this may require some setup, see the "one-time fixups" box on the
quickstart page for your platform (Linux or
Windows].
One Time Board Setup
If you have a Hail, imix, or nRF52840dk please skip to the next section.
If you have an Arduino Nano 33 BLE (sense or regular), you need to update the bootloader on the board to the Tock bootloader. Please follow the bootloader update instructions.
If you have a Micro:bit v2 then you need to load the Tock bootloader. Please follow the bootloader installation instructions.
Test The Board
With the board connected, you should be able to use tockloader to interact with
the board. For example, to retrieve serial UART data from the board, run
tockloader listen, and you should see something like:
$ tockloader listen
No device name specified. Using default "tock"
Using "/dev/ttyUSB0 - Imix - TockOS"
Listening for serial output.
Initialization complete. Entering main loop
You may also need to reset (by pressing the reset button on the board) the board to see the message. You may also not see any output if the Tock kernel has not been flashed yet.
In case you have multiple serial devices attached to your computer, you may need to select the appropriate J-Link device:
$ tockloader listen
[INFO ] No device name specified. Using default name "tock".
[INFO ] No serial port with device name "tock" found.
[INFO ] Found 2 serial ports.
Multiple serial port options found. Which would you like to use?
[0] /dev/ttyACM1 - J-Link - CDC
[1] /dev/ttyACM0 - L830-EB - Fibocom L830-EB
Which option? [0] 0
[INFO ] Using "/dev/ttyACM1 - J-Link - CDC".
[INFO ] Listening for serial output.
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAC0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
tock$
In case you don't see any text printed after "Listening for serial output", try
hitting [ENTER] a few times. You should be greeted with a tock$ shell
prompt. You can use the reset command to restart your nRF chip and see the
above greeting.
In case you want to use a different serial console monitor, you may need to identify the serial console device created for your board. On Linux, you can identify the J-Link debugger's serial port by running:
$ dmesg -Hw | grep tty
< ... some output ... >
< plug in the nRF52840DKs front USB (not "nRF USB") >
[ +0.003233] cdc_acm 1-3:1.0: ttyACM1: USB ACM device
In this case, the serial console can be accessed as /dev/ttyACM1.
You can also see if any applications are installed with tockloader list:
$ tockloader list
[INFO ] No device name specified. Using default name "tock".
[INFO ] Using "/dev/cu.usbmodem14101 - Nano 33 BLE - TockOS".
[INFO ] Paused an active tockloader listen in another session.
[INFO ] Waiting for the bootloader to start
[INFO ] No found apps.
[INFO ] Finished in 2.928 seconds
[INFO ] Resumed other tockloader listen session
If these commands fail you may not have installed Tockloader, or you may need to update to a later version of Tockloader. There may be other issues as well, and you can ask on Slack if you need help.
Testing You Can Compile the Kernel
To test if your environment is working enough to compile Tock, go to the
tock/boards/ directory and then to the board folder for the hardware you have
(e.g. tock/boards/imix for imix). Then run make in that directory. This
should compile the kernel. It may need to compile several supporting libraries
first (so may take 30 seconds or so the first time). You should see output like
this:
$ cd tock/boards/imix
$ make
Compiling tock-cells v0.1.0 (/Users/bradjc/git/tock/libraries/tock-cells)
Compiling tock-registers v0.5.0 (/Users/bradjc/git/tock/libraries/tock-register-interface)
Compiling enum_primitive v0.1.0 (/Users/bradjc/git/tock/libraries/enum_primitive)
Compiling tock-rt0 v0.1.0 (/Users/bradjc/git/tock/libraries/tock-rt0)
Compiling imix v0.1.0 (/Users/bradjc/git/tock/boards/imix)
Compiling kernel v0.1.0 (/Users/bradjc/git/tock/kernel)
Compiling cortexm v0.1.0 (/Users/bradjc/git/tock/arch/cortex-m)
Compiling capsules v0.1.0 (/Users/bradjc/git/tock/capsules)
Compiling cortexm4 v0.1.0 (/Users/bradjc/git/tock/arch/cortex-m4)
Compiling sam4l v0.1.0 (/Users/bradjc/git/tock/chips/sam4l)
Compiling components v0.1.0 (/Users/bradjc/git/tock/boards/components)
Finished release [optimized + debuginfo] target(s) in 28.67s
text data bss dec hex filename
165376 3272 54072 222720 36600 /Users/bradjc/git/tock/target/thumbv7em-none-eabi/release/imix
Compiling typenum v1.11.2
Compiling byteorder v1.3.4
Compiling byte-tools v0.3.1
Compiling fake-simd v0.1.2
Compiling opaque-debug v0.2.3
Compiling block-padding v0.1.5
Compiling generic-array v0.12.3
Compiling block-buffer v0.7.3
Compiling digest v0.8.1
Compiling sha2 v0.8.1
Compiling sha256sum v0.1.0 (/Users/bradjc/git/tock/tools/sha256sum)
6fa1b0d8e224e775d08e8b58c6c521c7b51fb0332b0ab5031fdec2bd612c907f /Users/bradjc/git/tock/target/thumbv7em-none-eabi/release/imix.bin
You can check that tockloader is installed by running:
$ tockloader --help
If either of these steps fail, please double check that you followed the environment setup instructions above.
Flash the kernel
Now that the board is connected and you have verified that the kernel compiles (from the steps above), we can flash the board with the latest Tock kernel:
$ cd boards/<your board>
$ make
Boards provide the target make install as the recommended way to load the
kernel.
$ make install
You can also look at the board's README for more details.
Installing Tock Applications
We have the kernel flashed, but the kernel doesn't actually do anything. Applications do! To load applications, we are going to use tockloader.
Loading Pre-built Applications
We're going to install some pre-built applications, but first, let's make sure we're in a clean state, in case your board already has some applications installed. This command removes any processes that may have already been installed.
$ tockloader erase-apps
Now, let's install two pre-compiled example apps. Remember, you may need to specify which board you are using and how to communicate with it for all of these commands. If you are using Hail or imix you will not have to.
$ tockloader install https://www.tockos.org/assets/tabs/blink.tab
The
installsubcommand takes a path or URL to an TAB (Tock Application Binary) file to install.
The board should restart and the user LED should start blinking. Let's also install a simple "Hello World" application:
$ tockloader install https://www.tockos.org/assets/tabs/c_hello.tab
If you now run tockloader listen you should be able to see the output of the
Hello World! application. You may need to manually reset the board for this to
happen.
$ tockloader listen
[INFO ] No device name specified. Using default name "tock".
[INFO ] Using "/dev/cu.usbserial-c098e513000a - Hail IoT Module - TockOS".
[INFO ] Listening for serial output.
Initialization complete. Entering main loop.
Hello World!
␀
Uninstalling and Installing More Apps
Lets check what's on the board right now:
$ tockloader list
...
┌──────────────────────────────────────────────────┐
│ App 0 |
└──────────────────────────────────────────────────┘
Name: blink
Enabled: True
Sticky: False
Total Size in Flash: 2048 bytes
┌──────────────────────────────────────────────────┐
│ App 1 |
└──────────────────────────────────────────────────┘
Name: c_hello
Enabled: True
Sticky: False
Total Size in Flash: 1024 bytes
[INFO ] Finished in 2.939 seconds
As you can see, the apps are still installed on the board. We can remove apps with the following command:
$ tockloader uninstall
Following the prompt, if you remove the blink app, the LED will stop blinking,
however the console will still print Hello World.
Now let's try adding a more interesting app:
$ tockloader install https://www.tockos.org/assets/tabs/sensors.tab
The sensors app will automatically discover all available sensors, sample them
once a second, and print the results.
$ tockloader listen
[INFO ] No device name specified. Using default name "tock".
[INFO ] Using "/dev/cu.usbserial-c098e513000a - Hail IoT Module - TockOS".
[INFO ] Listening for serial output.
Initialization complete. Entering main loop.
[Sensors] Starting Sensors App.
Hello World!
␀[Sensors] All available sensors on the platform will be sampled.
ISL29035: Light Intensity: 218
Temperature: 28 deg C
Humidity: 42%
FXOS8700CQ: X: -112
FXOS8700CQ: Y: 23
FXOS8700CQ: Z: 987
Compiling and Loading Applications
There are many more example applications in the libtock-c repository that you
can use. Let's try installing the ROT13 cipher pair. These two applications use
inter-process communication (IPC) to implement a
ROT13 cipher.
Start by uninstalling any applications:
$ tockloader uninstall
Get the libtock-c repository:
$ git clone https://github.com/tock/libtock-c
Build the rot13_client application and install it:
$ cd libtock-c/examples/rot13_client
$ make
$ tockloader install
Then make and install the rot13_service application:
$ cd ../rot13_service
$ tockloader install --make
Then you should be able to see the output:
$ tockloader listen
[INFO ] No device name specified. Using default name "tock".
[INFO ] Using "/dev/cu.usbserial-c098e5130152 - Hail IoT Module - TockOS".
[INFO ] Listening for serial output.
Initialization complete. Entering main loop.
12: Uryyb Jbeyq!
12: Hello World!
12: Uryyb Jbeyq!
12: Hello World!
12: Uryyb Jbeyq!
12: Hello World!
12: Uryyb Jbeyq!
12: Hello World!
Note: Tock platforms are limited in the number of apps they can load and run. However, it is possible to install more apps than this limit, since tockloader is (currently) unaware of this limitation and will allow to you to load additional apps. However the kernel will only load the first apps until the limit is reached.
Note about Identifying Boards
Tockloader tries to automatically identify which board is attached to make this process simple. This means for many boards (particularly the ones listed at the top of this guide) tockloader should "just work".
However, for some boards tockloader does not have a good way to identify which
board is attached, and requires that you manually specify which board you are
trying to program. This can be done with the --board argument. For example, if
you have an nrf52dk or nrf52840dk, you would run Tockloader like:
$ tockloader <command> --board nrf52dk --jlink
The --jlink flag tells tockloader to use the JLink JTAG tool to communicate
with the board (this mirrors using make flash above). Some boards support
OpenOCD, in which case you would pass --openocd instead.
To see a list of boards that tockloader supports, you can run
tockloader list-known-boards. If you have an imix or Hail board, you should
not need to specify the board.
Note, a board listed in
tockloader list-known-boardsmeans there are default settings hardcoded into tockloader's source on how to support those boards. However, all of those settings can be passed in via command-line parameters for boards that tockloader does not know about. Seetockloader --helpfor more information.
Familiarize Yourself with tockloader Commands
The tockloader tool is a useful and versatile tool for managing and installing
applications on Tock. It supports a number of commands, and a more complete list
can be found in the tockloader repository, located at
github.com/tock/tockloader. Below is
a list of the more useful and important commands for programming and querying a
board.
tockloader install
This is the main tockloader command, used to load Tock applications onto a
board. By default, tockloader install adds the new application, but does not
erase any others, replacing any already existing application with the same name.
Use the --no-replace flag to install multiple copies of the same app. To
install an app, either specify the tab file as an argument, or navigate to the
app's source directory, build it (probably using make), then issue the install
command:
$ tockloader install
Tip: You can add the
--makeflag to have tockloader automatically run make before installing, i.e.tockloader install --make
Tip: You can add the
--eraseflag to have tockloader automatically remove other applications when installing a new one.
tockloader uninstall [application name(s)]
Removes one or more applications from the board by name.
tockloader erase-apps
Removes all applications from the board.
tockloader list
Prints basic information about the apps currently loaded onto the board.
tockloader info
Shows all properties of the board, including information about currently loaded applications, their sizes and versions, and any set attributes.
tockloader listen
This command prints output from Tock apps to the terminal. It listens via UART, and will print out anything written to stdout/stderr from a board.
Tip: As a long-running command,
listeninteracts with other tockloader sessions. You can leave a terminal window open and listening. If another tockloader process needs access to the board (e.g. to install an app update), tockloader will automatically pause and resume listening.
tockloader flash
Loads binaries onto hardware platforms that are running a compatible bootloader.
This is used by the Tock Make system when kernel binaries are programmed to the
board with make program.
Tock Course
The Tock course includes several different modules that guide you through various aspects of Tock and Tock applications. Each module is designed to be fairly standalone such that a full course can be composed of different modules depending on the interests and backgrounds of those doing the course. You should be able to do the lessons that are of interest to you.
Each module begins with a description of the lesson, and then includes steps to follow. The modules cover both programming in the kernel as well as applications.
Setup and Preparation
You should follow the getting started guide to get your development setup and ensure you can communicate with the hardware.
Which Tutorial Should You Follow?
All tutorials explore Tock and running applications, but they focus on different subsystems and different application areas for Tock. If you are interested in learning about a specific feature or subsystem this table tries to help direct you to the most relevant tutorial.
| Aspect of Tock | Tutorial |
|---|---|
| Applications | |
| Hardware Root-of-Trust | Root of Trust |
| Fido Security Key | USB Security Key |
| Wireless Networking | Thread Networking |
| Topics | |
| Process Isolation | Root of Trust |
| Inter-process Communication | Thread Networking, Dynamic Apps |
| Kernel Configuration | Dynamic Apps |
| Skills | |
| Writing Apps | USB Security Key, Sensor |
| Implementing a Capsule | USB Security Key |
Tock as a Hardware Root of Trust (HWRoT) Operating Sytsem
This module and submodules will walk you through setting up Tock as an operating system capable of providing the software backbone of a hardware root of trust, placing emphasis on why Tock is well-suited for this role.
Background
A hardware root of trust (HWRoT) is a security-hardened device that provides the foundation of trust for another computing system. Systems such as mobile phones, servers, and industrial control systems run code and access data that needs to be trusted, and if compromised, could have severe negative impacts. HWRoTs serve to ensure the trustworthiness of the code and data their system uses to prevent these outcomes.
HWRoTs can come in two flavors: discrete and integrated.
-
Discrete: a discrete HWRoT is an individually-packaged system on chip (SoC), and communicates over one or more external buses to provide functionality.
-
Integrated: an integrated HWRoT is integrated into a SoC, and communicates over one or more internal buses to provide functionality to the rest of the SoC it resides in.
Some notable examples of HWRoTs include:
- The general-purpose, open-source OpenTitan HWRoT which comes in the discrete Earl Grey design as well as the Darjeeling integrated design
- Apple's Secure Enclave, the integrated root of trust in iPhone mobile processors
- Google's Titan Security Module, the discrete root of trust in Google Pixel phones
- Hewlett Packard Enterprise's Silicon Root of Trust, the integrated root of trust in their out-of-band management chip
- Microsoft's Pluton Security Processor, the integrated root of trust integrated into many of its silicon collaborators' processors (Intel, AMD, etc.)
- Arm's TrustZone, the general-purpose integrated HWRoT provided in some Cortex-M and Cortex-A processors
- Infineon's SLE78 Secure Element, which is used in YubiKey 5 series USB security keys
In practice, hardware roots of trust are essential for providing support for all kinds of operations, including:
-
Application-level cryptography: While any processor can be used to perform cryptographic operations, doing so on a non-hardened processor (i.e. one that can't prevent physical attacks) can result in side-channel leaks or vulnerability to fault injection attacks, allowing attackers to uncover secrets by measuring execution time or power consumption of the chip, or by triggering incorrect execution paths, respectively. HWRoTs are specifically designed to prevent such issues.
-
Key management: Similarly, cryptographic keys stored in memory can be leaked using invasive attacks on a chip--a secure element can instead store the keys and use them without them ever being copied to memory. Smaller HWRoTs focused on providing hardware cryptographic operations and secure key storage are often called secure elements.
-
Secure boot: In many systems, it is critical to ensure that code the processor runs hasn't been tampered with by an attacker. Secure boot allows for this by having multiple boot stages, where each stage verifies a digital signature on the next to verify integrity. The bottom-most boot stage is immutable (usually a ROM image baked into the chip design itself). In security-critical systems, the first boot stage is the HWRoT's ROM, which then boots the rest of the RoT, and finally the main processor of the system.
-
Hardware attestation: Often with internet-connected devices, it's important for a server to be able to verify that it's connected to a valid, uncompromised device before transferring data back-and-forth. During boot, each boot stage of a device with a HWRoT can generate and sign certificates attesting to the hash of the next boot stage's value. Each of these certificates establishes a conditional trust, demonstrating that a given stage is uncompromised, provided that all previous stages are also uncompromised. Together, these certificates form a trust ladder the server can review, verifying that the expected hash values were reported all the way back to the HWRoT ROM.
-
Device firmware updates (DFU): Device firmware updates can be a major threat vector to a device, as a vulnerability in the target device's ability to verify authenticity of an update can allow for an attacker to achieve remote code execution. By delegating device firmware updates to a HWRoT, which can verify the signature and update flash in a tamper-free way on its own, the process of DFU can be made significantly less risky.
-
Drive encryption: Similarly, drive encryption can be performed using a HWRoT to avoid attackers tampering with the drive encryption process and compromising the confidentiality of user data.
Hardware Notes
For accessibility, we will use a standard microcontroller in this demo rather than an actual hardware root of trust; that said, the principles in this demo apply readily to any HWRoT.
This guide was designed for the nRF52840dk with an attached screen. However, other hardware will work but will need some additional configuration to match the directions presented here.
Goal
Our goal is to build a simple encryption service, which we'll mount several attacks against, and demonstrate how Tock protects against them.
Along the way, we'll also cover foundational Tock concepts to give a top-level view of the OS as a whole.
nRF52840dk Hardware Setup
Before beginning, check the following configurations on your nRF52840dk board.
- The
Powerswitch on the top left should be set toOn. - The
nRF power sourceswitch in the top middle of the board should be set toVDD. - The
nRF ONLY | DEFAULTswitch on the bottom right should be set toDEFAULT.
You should plug one USB cable into the top of the board for both programming and
communication, into the port labeled MCU USB on the short side of the board.
Kernel Setup
This tutorial requires a Tock kernel configured with two specific capsules instantiated that may not be included by default with a particular kernel:
The easiest way to get a kernel image with these installed is to use the Hardware Root of Trust tutorial configuration for the nRF52840dk.
cd tock/boards/tutorials/nrf52840dk-root-of-trust-tutorial
make install
However, you can also follow the guides to setup these capsules yourself in a different kernel setup or for a different board.
Organization and Getting Oriented to Tock
To get started, we briefly describe the general structure of Tock and will deep-dive into these components throughout the tutorial:
A Tock system contains primarily two components:
- The Tock kernel, which runs as the operating system on the board. This is compiled from the Tock repository.
- Userspace applications, which run as processes and are compiled and loaded separately from the kernel.
The Tock kernel is compiled specifically for a particular hardware device,
termed a board. Tock provides a set of reference board files under
/boards/<board name>. Any
time you need to compile the kernel or edit the board file, you will go to that
folder. You also install the kernel on the hardware board from that directory.
While the Tock kernel is written entirely in Rust, it supports userspace applications written in multiple languages. In particular, the Tock community maintains two userspace libraries for application development in C and Rust respectively:
libtock-cfor C applications ( tock/libtock-c )libtock-rsfor Rust applications ( tock/libtock-rs )
We will use libtock-c in this tutorial. Its example applications are located
in the /examples
directory of the libtock-c repository.
Stages
This module is broken into three stages:
- Creating a simple encryption service
- Preventing attacks at runtime with the MPU
- Preventing attacks at compile-time with Tock's isolation guarantees
Encryption Service Userspace Application
This submodule guides you through creating and using an encryption service. Providing an encryption service is a common feature of a HWRoT.
An encryption service can cryptographically encrypt and/or decrypt data on behalf of an application. Crucially, the service encapsulates the encryption key, preventing the application from ever having access to the key. This also prevents an attacker from being able to retrieve the key, enhancing the security of the encrypted data.
Once we setup the encryption service, we will use it throughout this course to demonstrate Tock's strengths as a hardware root of trust OS.
Background
Secure Elements as Roots of Trust
Recall from the overview that a secure element is a purpose-built chip used for key storage and encryption purposes, often in support of a main processor which needs to perform some kind of cryptography.
In a real-world setting, a secure element like the Infineon SLE78 (the chip used in the YubiKey 5 series) might communicate over a standard device-internal bus like SPI or I2C, or might even communicate directly with a host over USB.
Often, smaller secure elements like the SLE78 will receive commands and deliver responses encoded as application protocol data units (APDUs), a holdover from the smart card industry.
While we could replicate this behavior for our encryption service by passing APDUs back and forth over USB, we elide this complexity for the sake of simplicity and just prompt the user for plaintext to encrypt via Tock's console.
Hardware-backed Keys
In an actual hardware root of trust, the AES key in the encryption oracle would be hardware-backed, i.e. it would be generated and kept in a hardware key store apart from where the processor could directly access it.
While the nRF5x AES peripheral doesn't have support for hardware-backed keys, it does allow us to store our AES128 key in the encryption oracle driver and load it into the AES128 peripheral as needed; this is almost as secure, and in any case the difference is invisible to the userspace application which can't access the key either way.
Applications in Tock
For readers who have previously written embedded software, it's important to note that Tock applications are written in a manner much more similar to traditional, non-embedded software. They are compiled separately from the kernel and loaded separately onto the hardware. They can be started or stopped individually and can be removed from the hardware individually. Moreover, the kernel decides which applications to run and what permissions they should be given.
Applications make requests to the OS kernel through system calls. Applications
instruct the kernel using Command system calls, and the kernel notifies
applications with upcalls the application must subscribe to. Importantly,
upcalls never interrupt a running application. The application must yield to
receive upcalls (i.e. callbacks).
The userspace library (libtock) wraps system calls in easier to use functions.
The libtock library is completely asynchronous. Synchronous APIs to the system
calls are in libtock-sync. These functions include the call to yield and
expose a synchronous driver interface. Application code can use either.
Tock Allows and Upcalls
When interacting with drivers in Tock, it's important to note that by design, any driver can only access the data you explicitly allow it access to. In Tock, an allow is a buffer shared from a userspace application to a specified driver. These can be read-only, where the driver can only read what the app supplies in the buffer, or read-write, where the driver can also modify the buffer to e.g. write results.
In order to easily allow asynchronous driver interfaces, the Tock driver allows registering upcalls, callbacks which kernel drivers can invoke e.g. to signal to an app that a requested operation has completed.
Inter-process Communication (IPC) in Tock
Tock has an IPC driver in the kernel which allows userspace apps to advertise
IPC services with names such as org.tockos.tutorial.led_service.
Applications that want to make requests over IPC can use the ipc_discover()
function with an IPC service name to fetch the application ID of the app hosting
the service. After this is done, the requesting app can register callbacks,
allow access to shared buffers, and finally notify the IPC service to perform
some operation.
Submodule Overview
We will be developing two userspace applications. The first provides a user interface with the screen and buttons. The second is the encryption service application. An overview of the structure is here:
┌──────────────────┐ ┌────────────────────┐
│ │ │ │
│ Screen App │ IPC │ Encryption Service │
│ │◄─────►│ App │
│ UI + Logging │ │ │
│ │ │ │
└───┬───────┬──────┘ └──┬───────────┬─────┘
Userspace │ │ │ │
─────────────────┼───────┼─────────────────┼───────────┼──────
Tock ┌──▼───┐┌──▼────┐ ┌─────▼────────┐┌─▼─────┐
Kernel │Screen││Buttons│ │AES Encryption││Console│
└──────┘└───────┘ │Oracle │└───────┘
└──────────────┘
The two applications will communicate using IPC. We will focus on creating the encryption service app, and use the screen app to help interact with the user.
Each application uses capsules provided by the kernel. The capsules have already been created and are already included with the kernel we installed. Consistent with our goal for an HWRoT encryption service, the AES Encryption Oracle has a built-in AES key that we can use to encrypt messages without our userspace application ever making contact with the key itself.
Milestones
We have three small milestones in this section, all of which build upon supplied starter code.
- Milestone one adds support for interfacing with a dispatch/logging service, to illustrate how various root of trust services might be dispatched in practice while maintaining separation.
- Milestone two adds support for sending/receiving data and serializing plaintext, introducing how libtock-c APIs work.
- Milestone three adds actual encryption support using the encryption oracle driver, demonstrating how the Tock syscall interface.
Setup
Before starting, check the following:
-
Make sure you have compiled and installed the Tock kernel with the screen and encryption oracle drivers on to your board.
cd tock/boards/tutorials/nrf52840dk-root-of-trust-tutorial make install -
Make sure you have no testing apps installed. To remove all apps:
tockloader erase-apps
Starter Code
We'll start with the starter code, which includes a logging application for displaying encryption service logs to the OLED screen, as well as a scaffold for developing the remainder of the encryption service userspace app.
-
Inside your copy of
libtock-c, navigate tolibtock-c/examples/tutorials/root_of_trust/.This contains the starter code which you'll work from in the following steps. For now, all this application does is present a list of services that the root of trust can provide, and allows you to select one to interact with.
-
Compile the screen application and load it onto your board. In the
screen/subdirectory, runmake install -
Next, navigate to the
encrypt_service/subdirectory in the same parent folder and load it as well by again runningmake install -
After both applications are loaded, you should see a screen which should allow you to select a service to dispatch. You can navigate up and down in the menu by using
BUTTON 1andBUTTON 3on the nRF52840dk board, and you can select an option by pressingBUTTON 4and then clickingStart.Note that right now, the encryption service doesn't have any code to react to requests for dispatch, so if you select it nothing will happen.
The source code for the screen application is in screen/main.c. If you dig
through it, you'll find logic for
- displaying the menu to select an application,
- requesting a root of trust service to be dispatched on select
- listening for logging requests to display
The macros for generating a menu using the u8g2 user interface library are a
bit obtuse at first, so they (along with the rest of the file) have been
commented thoroughly.
Milestone One: Connecting to the Main Screen App
To begin, we first want our encryption service to be able to (a) respond when the main screen app signals it to take over control of the UART console, and (b) connect to the logging service the main screen app provides for displaying logs to the screen.
From a functionality standpoint, we certainly could have service dispatch, all of the desired cryptographic services, and logging functionality in one event loop in an application; however, when using Tock, separating these functionalities into different apps is helpful from a security perspective. We'll discuss this more in the next part of the tutorial.
First, let's modify our scaffold in encryption_service_starter/main.c to
respond to the main screen app's dispatch signal using Tock's inter-process
communication (IPC) driver. Rename the directory in your local copy from
encryption_service_starter/ to encryption_service/. Completed code is
available in encryption_service_milestone_one/ if you run into issues.
-
Take a look in
screen/main.cat theselect_rot_service()function. This function, called bymain(), takes in the name of an IPC service hosted e.g. by our encryption service app and- calls
ipc_discover()to go from the IPC service name to the ID of the process hosting that IPC service - calls
ipc_register_service_callback()to register a logging IPC service underorg.tockos.tutorials.root_of_trust.screen, so that the selected root of trust service can log to screen - calls
ipc_notify_service()to trigger the IPC service of the process whose IDipc_process()found
All of these IPC API functions are provided by the
libtock/kernel/ipc.hheader included at the top of the file. - calls
-
To start, open
encryption_service/main.cand create await_for_start()function which registers an IPC callback under the service nameorg.tockos.tutorials.root_of_trust.encryption_serviceand then yields until that callback is triggered by the main screen app.- You'll want to use the IPC function
ipc_register_service_callback()to register your callback function. See the documentation there for how the signature of your callback function should look. - The callback function you write should set a global
boolfrom false to true.wait_for_start()can then use theyield_forfunction to wait for this change in state.
- You'll want to use the IPC function
-
Now, call
wait_for_start()inmain(), and follow it with a call toprintf()to send a message to the UART console; this should indicate when your app has been selected. -
To test this out, build and install your application as previous, then run
tockloader listenin a separate terminal. When you select the encryption service and hitStartin the menu, you should see your message in the console (not on the screen).TIP: You can leave the console running, even when compiling and uploading new applications. It's worth opening a second terminal and leaving
tockloader listenalways running.
Next, we need to connect our application back to the screen logging IPC service. To do this,
-
Again in
encryption_service/main.c, create a newsetup_logging()function which takes in a message string and sends it via IPC to the logging service to display.-
In the
log_to_screen()function, you'll want to useipc_discover()to discover the process ID for the logging service,ipc_register_client_callback()to provide a callback that sets a global flag to indicate a completed log, andipc_share()to share a buffer to the logging service. -
When creating the log buffer to share over IPC, which can store as long of a message as will fit on the OLED screen. 32 bytes should be sufficient. Make sure that the buffer is marked with the
alignedattribute. i.e.char log_buffer[LOG_WIDTH] __attribute__((aligned(LOG_WIDTH)));
-
-
Next, create a new
log_to_screen()function which takes in a null-terminated message string and sends it via IPC to the logging service to display.- To trigger the logging service to fetch your message string from the shared
buffer, you'll want to use
ipc_notify().
- To trigger the logging service to fetch your message string from the shared
buffer, you'll want to use
-
To test your implementation, add calls to
wait_for_start()andsetup_logging()tomain(), and follow them with some calls tolog_to_screen().- To test your implementation, recompile and re-install your encryption app and then use the on-device menu to start the encryption service.
Checkpoint: Your application should now be able to receive encryption requests over the UART console, and log these requests over IPC to the screen.
Milestone Two: Sending/Receiving Data and Serializing Plaintext
Now that we can interact with the main screen app over IPC, we should set up the UART console to allow inputting secrets to encrypt, and make sure that we can encode the resulting ciphertext as hex to present back to the user.
In a practical HWRoT setting, it may be inadvisable to send secret values to a
device in the clear where they could be intercepted. For instance, smart cards
and smaller secure elements often make use of GlobalPlatform's Secure Channel
Protocols such as
Secure Channel Protocol 03
to establish an encrypted, authenticated channel before exchanging any secret
information.
For brevity, we won't implement a full secure channel in this protocol, but at the end of this section we include a challenge in this vein for after the tutorial is complete.
To start, let's retrieve the secret from the user over UART to parse. Completed
code is available in encryption_service_milestone_two/ if you run into issues.
-
In
encryption_service/main.c, create arequest_plaintext()function which prompts a user over UART for plaintext into a provided buffer with a provided size.-
To prompt the user, you'll want to use
libtocksync_console_write()with a message like"Enter a secret to encrypt:". -
For fetching a response, you'll want to use
libtocksync_console_read()to read bytes one-by-one, breaking when you hit a newline (\nor\r). You'll also want to use this function to strip leading whitespace from the user's input. -
Make sure to echo each character as it's received by writing it back, or else the user won't be able to see their input.
-
For convenience later, return the size of the input.
-
-
Next, we'll add a function
bytes_to_hex()which inputs a byte buffer and length, and outputs a null-terminated hex string.- When writing this function, the most direct way to convert a byte to hex is
with
sprintf: you can use"%02X"as a format string.
- When writing this function, the most direct way to convert a byte to hex is
with
-
To test both of these functions in concert, modify
mainto, in a loop, input plaintext over the console, convert it to hex, and then report it to the screen.
Checkpoint: Your application should now be able to input messages via the UART interface and report byte values as hex.
Milestone Three: Adding Encryption Support
Finally, we want to actually encrypt our messages before we report them.
NOTE: If you've completed the HOTP tutorial prior, the same implementation of
oracle.cthere will work--feel free to simply copy it over fromencryption_service_milestone_three/if you've already implemented it before.
We first create a new file to house our interface to the encryption oracle
driver, then integrate it into main:
-
Create a header file
oracle.hinencryption_service/with the following prototype (don't forget to#include <stdint.h>!):int oracle_encrypt(const uint8_t* plaintext, int plaintext_len, uint8_t* output, int output_len, uint8_t iv[16]); -
Create a source file
oracle.cnext tooracle.hwith an implementation of this function, using the encryption oracle to encryptplaintextand placing the result inoutput_len. Theivbuffer should be used to return the randomized initialization vector generated for encryption.-
To randomize the IV, you'll want to use
libtocksync_rng_get_random_bytes(). -
The current kernel configuration has the ID for the encryption capsule as
0x99999, which you'll pass to each command that targets it. -
From there, the driver requires three allows to operate; you'll want to use
allow_readonly()andallow_readwrite()to set them up.- A read-only allow with ID 0 for sending the input plaintext
- A read-only allow with ID 1 for sending the input IV
- A read-write allow with ID 0 for receiving the output ciphertext
-
Next, you'll need to set up an upcall to confirm when the encryption is done. You'll want the signature of your upcall to look like
static void crypt_upcall(__attribute__((unused)) int num, int len, __attribute__ ((unused)) int arg2, __attribute__ ((unused)) void* ud);and it should both set a global flag indicating that the upcall is done, as well as store the ciphertext length passed to it in a global variable.
-
Finally, you'll need to send a command to the driver with command ID 1 to trigger the start, after which you should
yield_for()until the upcall completes and reset thedoneflag for the next call. The return value of the function should be the length returned from the upcall.
-
-
Finally, let's wire it all together. Go back to
main()inmain.c, and make it do the following:- Wait for the start signal for the encryption service (
wait_for_start()) - Set up the IPC logging interface (
setup_logging()) - Looping forever (using
log_to_screento indicate each step is happening):- Request a plaintext from the user (
request_plaintext()), from a plaintext buffer and to ciphertext buffer both of size512(four AES-128 blocks) - Encrypt the plaintext (
oracle_encrypt(), fromoracle.c) - Convert the ciphertext to a hex string (
bytes_to_hex()) - Dump the ciphertext to the console (e.g. with
printf("Ciphertext: %s\n", ...))
- Request a plaintext from the user (
- Wait for the start signal for the encryption service (
When you run the test now, you should be able to use tockloader listen and
type messages into the UART console when prompted to encrypt them.
Checkpoint: Your application should now be able to encrypt arbitrary messages sent over the UART console, logging the status of the encryption capsule to the screen as it runs.
Submodule Complete
Congratulations! Feel free to move on to the next section, where we'll begin to attack our implementation and show how Tock allows for defense-in-depth measures appropriate for a root of trust operating system.
If you have additional time or are looking to deepen your knowledge of Tock, continue to challenge section below.
Challenge: Authenticating the Results
NOTE: This challenge is open-ended, may take a while, and requires experience working on Tock drivers--it's best approached after completing the remainder of the tutorial. We'll touch on Tock drivers later in this tutorial, but you can also follow the HOTP tutorial for additional practice if you'd like.
As mentioned earlier, communication channels with a HWRoT are often encrypted and authenticated. The former provides confidentiality so that secrets can't be extracted by eavesdroppers; meanwhile, the latter provides authenticity of results so attackers can't impersonate either party.
While designing a secure channel is a surprisingly tricky task, many existing frameworks exist, e.g. the popular Noise Protocol Framework used by many projects including the well-known WireGuard VPN. As a step in this direction, the challenge described here is to just provide authentication using ECDSA signatures for the ciphertexts that the root of trust produces, so that a client of the encryption service can be sure that the results they receive came from our root of trust.
Here is an outline for how one might go about doing so--these steps are intentionally a bit vague, as this is intended more to serve as a longer-term practice than something that can be done in the timeframe of an in-person tutorial:
-
You'll want to first add a signing oracle driver. While the nRF52840dk board used for this tutorial lacks ECDSA hardware support[^1], Tock provides an
ecdsa-swdriver which wraps RustCrypto's signing and verifying implementations to provide software support.-
The actual structure you will want to use is the
EcdsaP256SignatureSignerincapsules/ecdsa_sw/src/p256_signer.rs. This struct implements thepublic_key_crypto::SignatureSignhardware interface layer (HIL) trait, so you can use itssign()method to sign messages and itsset_sign_client()to designate a callback for when a signing operation is completed. Thepublic_key_crypto::SetKeyHIL will similarly allow you to change the key the signer uses. -
You can base your work off the encryption oracle implementation in
capusles/extra/tutorials/encryption_oracle_chkpt5.rs. Most of the logic for tracking driver state should remain the same, but instead of the driver struct containing an instance of an AES struct used encrypt, your driver struct will contain anEcdsaP256SignatureSignerused to sign.
-
-
Next, you'll want to create a board definition based off the one in
boards/nordic/nrf52840dk/src/main.rswhich instantiates aEcdsaP256SignatureSignerand your signing oracle driver, passing the former to the latter on creation.- For an example this struct in use, see the ECDSA test capsule in
capsules/ecdsa_sw/src/test/p256.rsas well as the test board configuration inboards/configurations/nrf52840dk/nrf52840dk-test-kernel/src/test/ecdsa_p256_test.rswhich depends on it.
- For an example this struct in use, see the ECDSA test capsule in
-
Finally, you'll want to create a new userspace interface to this driver akin to that in
encryption_service/oracle.c. The resulting file should be almost identical, but of course with functions accepting messages to sign instead of secrets to encrypt, etc.
Even if you don't complete all these steps, hopefully reviewing the above outline should give a good picture of how you can go from an idea of a driver you need for an application to a full implementation and integration into a userspace app.
[^1] This is almost true: the nRF52840 chip contains the closed-source ARM TrustZone CryptoCell 310, which has support for ECDSA signatures, but sadly there's not driver support for it yet (due to its closed-source nature).
Userspace Attacks on the Encryption Service
Now that the userspace application has been completed, we can attempt to perform some attacks on it and demonstrate how Tock stops them.
The primary theme we'll see is that Tock takes a two-fold approach to security though isolation; for everything above the syscall layer, isolation between apps is guaranteed at runtime using hardware protection, whereas below the syscall layer, isolation between components is guaranteed at compile-time via careful use of Rust's type system. This allows for the flexibility of dynamically loading applications while simultaneously providing the highest degree of security for the kernel: if isolation is violated, the kernel simply won't build.
In this submodule, we'll explore the runtime isolation between applications, and in the next we'll dive into the kernel to see an example of compile-time isolation in the kernel.
Background
Memory Protection in Embedded Systems
In non-embedded contexts, a CPU will usually have a memory management unit (MMU) which handles all memory accesses to memory pages. Embedded contexts usually don't provide enough memory to justify paging, so a much simpler piece of hardware--the memory protection unit (MPU)--is used instead.
The MPU's sole job is to maintain a series of contiguous memory regions which
the processor should currently be allowed to access to provide hardware-level
runtime isolation guarantees. For instance, when an application is running, the
MPU typically allows the processor read-execute access to the .text section of
the application and read-write access to the corresponding section in SRAM. Each
context switch in Tock is paired with a reconfiguration of the MPU to ensure
that out-of-bounds accesses don't allow applications to access memory belonging
to the kernel or other applications.
Submodule Overview
We have two small milestones in this section, one of which builds upon supplied starter code for an application, and the other of which builds upon the board definition we've been using for our kernel this whole time.
- Milestone one adds an application which attempts to dump its own memory, followed by the memory of the encryption oracle application--we use this as an example of a potential userspace attack on a root of trust.
- Milestone two customizes Tock's response to this attack at the board definition level.
Starter Code
The starter code for the userspace attack application is in the
suspicious_service_starter/ subdirectory.
To launch this 'suspicious' service which we'll use to dump userspace memory,
simply navigate as per the previous submodule to the Suspicious service in the
on-device menu, select it, and then select Start as usual.
Milestone One: Attempting to Dump Memory from SRAM
To start, we first need to set up our attack application to attempt to dump
memory from SRAM. If you get stuck, an implementation of this milestone is
available at suspicious_service_milestone_one/.
-
In
libtock-c/examples/tutorials/root_of_trust/, rename the directorysuspicious_service_starter/to justsuspicious_service/. -
Inside
suspicious_service/main.c, we'll want to start by adding everything we needed from the previous step for interacting with the main screen application. Copy overwait_for_start(),setup_logging(), andlog_to_screen()along with the IPC callbacks and global variables they rely upon from the previous submodule tosuspicious_serivce/main.c. -
Now we will dump the contents of the suspicious service's memory. In
suspicious_service/main.c, add a functiondump_memory()that takes in auint32_t *startword pointer, auint32_t *endword pointer, and a label string, and loops over each address from start to end while printing out over UART e.g.[<LABEL>] <address>: <value>to show the value at each memory address. -
In main, call
dump_memory()to dump the first 16KiB (0x1000words of memory) of thesuspiciousSRAM dumping service you're modifying right now.To get the address that our SRAM dumping application's memory starts at, Tock supplies a
Memopclass of syscalls we can use, which are nicely wrapped in utility functions such astock_app_memory_begins_at()in libtock-c.If desired, use
log_to_screen()to log when the memory dump starts/stops. You should (when selecting theSuspicious servicein the on-device menu) successfully be able to retrieve the bytes of code of the running SRAM dumping service.
Checkpoint: Your suspicious service application should be able to dump its own memory contents.
Now that we've established an app can dump its own memory, can it also dump the memory from a different application? Intuitively, processes shouldn't be able to read memory from other apps. However, embedded systems often do not provide the same isolation that we expect on servers, desktops, and phones. Let's try it to see what happens.
-
We first want to obtain the addresses in memory the kernel allocated for the encryption service we installed previously. To do this, we'll rebuild the kernel and add an additional feature. Under our board definition in
tock/boards/tutorials nrf52840dk-root-of-trust-tutorial/, you'll want to make the following change so that the process load debugging is enabled for the kernel:--- a/boards/tutorials/nrf52840dk-root-of-trust-tutorial/Cargo.toml +++ b/boards/tutorials/nrf52840dk-root-of-trust-tutorial/Cargo.toml @@ -10,7 +10,7 @@ build = "../../build.rs" edition.workspace = true [features] -default = ["screen_ssd1306"] +default = ["screen_ssd1306", "kernel/debug_load_processes"] screen_ssd1306 = [] screen_sh1106 = [] -
After making this change, run (in the same directory)
make installso that the new kernel is installed. From there, press theRESETbutton on the board, and look at yourtockloader listenconsole; it should show something like[INFO ] Using "/dev/ttyACM0 - J-Link - CDC". [INFO ] Listening for serial output. Initialization complete. Entering main loop NRF52 HW INFO: Variant: AAF0, Part: N52840, Package: QI, Ram: K256, Flash: K1024 ... Loading: org.tockos.tutorials.attestation.encryption [1] flash=0x00048000-0x0004C000 ram=0x2000A000-0x2000BFFF ... No more processes to load: Could not find TBF header.These debug statements are from Tock's application loader. Reviewing the line starting with
Loading:, we can clearly see that the SRAM range for the encryption service is0x2000A000-0x2000BFFF. -
After that, try adding another
dump_memory()call to dump the first0x1000words of the encryption application. Because applications should never need to access each other's memory, you'll need to get this address from the debug output you collected in step 3. Once you've done this, your code should compile fine, but when you check thetockloader listenUART console, you should see a fault dump.
With any luck, the fault dump you receive should look something like this:
...
---| Cortex-M Fault Status |---
Data Access Violation: true
Forced Hard Fault: true
Faulting Memory Address: 0x2000A000
...
𝐀𝐩𝐩: org.tockos.tutorials.attestation.suspicious - [Faulted]
Events Queued: 0 Syscall Count: 4118 Dropped Upcall Count: 0
Restart Count: 0
Last Syscall: Yield { which: 1, param_a: 0, param_b: 0 }
Completion Code: None
╔═══════════╤══════════════════════════════════════════╗
║ Address │ Region Name Used | Allocated (bytes) ║
╚0x2000E000═╪══════════════════════════════════════════╝
│ Grant Ptrs 120
│ Upcalls 320
│ Process 768
0x2000DB48 ┼───────────────────────────────────────────
│ ▼ Grant 216
0x2000DA70 ┼───────────────────────────────────────────
│ Unused
0x2000CF3C ┼───────────────────────────────────────────
│ ▲ Heap 1468 | 4336 S
0x2000C980 ┼─────────────────────────────────────────── R
│ Data 384 | 384 A
0x2000C800 ┼─────────────────────────────────────────── M
│ ▼ Stack 416 | 2048
0x2000C660 ┼───────────────────────────────────────────
│ Unused
0x2000C000 ┴───────────────────────────────────────────
.....
0x00050000 ┬─────────────────────────────────────────── F
│ App Flash 16272 L
0x0004C070 ┼─────────────────────────────────────────── A
│ Protected 112 S
0x0004C000 ┴─────────────────────────────────────────── H
...
Indeed, when we tried to access the first address from the encryption service's SRAM, the nRF52840's MPU triggered a hard fault, which passed control to Tock's hard fault handler and allowed Tock to halt the application.
If we look even further down the debug dump, we can actually even see the MPU configuration Tock set up at the time of the fault:
Cortex-M MPU
Region 0: [0x2000C000:0x2000D000], length: 4096 bytes; ReadWrite (0x3)
Sub-region 0: [0x2000C000:0x2000C200], Enabled
Sub-region 1: [0x2000C200:0x2000C400], Enabled
Sub-region 2: [0x2000C400:0x2000C600], Enabled
Sub-region 3: [0x2000C600:0x2000C800], Enabled
Sub-region 4: [0x2000C800:0x2000CA00], Enabled
Sub-region 5: [0x2000CA00:0x2000CC00], Enabled
Sub-region 6: [0x2000CC00:0x2000CE00], Enabled
Sub-region 7: [0x2000CE00:0x2000D000], Enabled
Region 1: Unused
Region 2: [0x0004C000:0x00050000], length: 16384 bytes; UnprivilegedReadOnly (0x2)
Sub-region 0: [0x0004C000:0x0004C800], Enabled
Sub-region 1: [0x0004C800:0x0004D000], Enabled
Sub-region 2: [0x0004D000:0x0004D800], Enabled
Sub-region 3: [0x0004D800:0x0004E000], Enabled
Sub-region 4: [0x0004E000:0x0004E800], Enabled
Sub-region 5: [0x0004E800:0x0004F000], Enabled
Sub-region 6: [0x0004F000:0x0004F800], Enabled
Sub-region 7: [0x0004F800:0x00050000], Enabled
Region 3: Unused
Region 4: Unused
Region 5: Unused
Region 6: Unused
Region 7: Unused
This indicates that our application had read-write access to the range
0x2000C000 - 0x2000D000 (the SRAM dump application's allotted SRAM) and
read-only access to the range 0x0004F800 - 0x00050000 (the SRAM dump
application's code) but that an attempted access to any other region of memory
would result in a hard fault, as we just saw. As such, even when the kernel is
configured to accept arbitrary applications, runtime application isolation can
be enforced.
Checkpoint: Your suspicious service application was blocked from reading the memory of a different application!
Milestone Two: Modifying our Kernel's Fault Policy
When a system faults, it can be very useful to dump as much information as possible to the console to aid in debugging. In some secure production contexts though, it might be useful to keep dumped information on system state to a minimum. As an example of this in Tock, we will modify the kernel's application fault policy to provide less information while still alerting the user that an application has faulted, keeping the more potentially sensitive details like MPU configurations for e.g. protected logs.
To start, we'll need to open up our board definition in Tock:
-
Open
tock/boards/tutorials/nrf52840dk-root-of-trust-tutorial/main.rs, and note where it says#![allow(unused)] fn main() { const FAULT_RESPONSE: capsules_system::process_policies::PanicFaultPolicy = capsules_system::process_policies::PanicFaultPolicy {}; }This is the part of the board configuration file that indicates how the Tock kernel should respond to an application faulting. The
PanicFaultPolicysimply causes the whole system to panic upon an application faulting; while this is helpful for debugging, it does allow malicious applications to deny service in production and can reveal information regarding MPU configuration that might be best kept to device logs. -
To implement our own fault policy, we'll add a new Rust
structwhich represents our policy: above the line displayed above, add a line#![allow(unused)] fn main() { struct LogThenStopFaultPolicy {} } -
Next, we'll want to define how our policy works when a fault happens. To do this, we'll add an implementation for a Rust trait
ProcessFaultPolicywhich requires us to add anaction()method that the kernel can call whan a running app faults.#![allow(unused)] fn main() { impl kernel::process::ProcessFaultPolicy for LogThenStopFaultPolicy { fn action(&self, process: &dyn process::Process) -> process::FaultAction { kernel::debug!( "CRITICAL: process {} encountered a fault!", process.get_process_name() ); match process.get_credential() { Some(c) => kernel::debug!("Credentials checked for app: {:?}", c.credential), None => kernel::debug!("WARNING: no credentials verified for faulted app!"), } kernel::debug!("Process has been stopped. Review logs."); process::FaultAction::Stop } } }This now just indicates which process faulted, indicates the credentials (i.e. a code signing signature) that the application was loaded with, and then instructs the user to check the HWRoT logs.
-
Finally, to register this as the fault response we want, replace the previous line starting with
const FAULT_RESPONSE: ...with one that definesFAULT_RESPONSEas an instance of our newLogThenStopFaultPolicy:#![allow(unused)] fn main() { const FAULT_RESPONSE: LogThenStopFaultPolicy = LogThenStopFaultPolicy {}; } -
Finally, run
make installin ourtock/boards/tutorials/nrf52840dk-root-of-trust-tutorial/directory.
Now, when you run the suspicious SRAM dump service, you should see something like the following:
CRITICAL: process org.tockos.tutorials.attestation.suspicious encountered a fault!
WARNING: no credentials verified for faulted app!
Process has been stopped. Review logs.
Out of the box, Tock was able to provide runtime application isolation between our encryption service and a malicious SRAM dumping application, and in just a few lines of code, we were able to customize our kernel's response to application faults to match our production HWRoT use case.
In the next submodule, we'll explore one aspect of Tock's compile-time kernel-level isolation guarantees: capabilities.
Kernel Attacks on the Encryption Service
In this last submodule of the HWRoT course, we'll explore how Tock's kernel-level isolation mechanisms help protect sensitive operations in a HWRoT context.
Our previous attempt at an attack on the HWRoT encryption service—an SRAM dumping attack—assumed that we were able to load a malicious application. As we saw, Tock's process-level isolation guarantees prevented the malicious application from being able to compromise other processes.
But what if the attacker tries to compromise the kernel itself? To give our attacker even more of an advantage this time, let's assume that a hypothetical attacker of our HWRoT might try slip some questionable logic into a kernel driver, and see how Tock provides defense-in-depth via language-based isolation at the driver level.
NOTE: For a full description of Tock's threat model and what forms of isolation it's intended to provide, see the Tock Threat Model page elsewhere in the Tock Book.
Background
Rust Traits and Generics
The Rust programming language (which the Tock kernel is written in) allows for defining methods on structs and enums, similar to class methods in many languages.
Following this analogy, Rust traits are like interfaces in other languages:
they let you specify shared behavior between types. For instance, the Clone
trait in Rust roughly looks like
#![allow(unused)] fn main() { pub trait Clone { fn clone(&self) -> Self; } }
which indicates that any type that implements the Clone trait needs to provide
an implementation of clone returning something of its own type (Self) given
a reference to itself (&self). Implementations are provided in impl blocks:
for instance, to implement the above trait, you might write something like
#![allow(unused)] fn main() { struct MyStruct { ... } impl Clone for MyStruct { fn clone(&self) -> Self { ... } } }
Types can be bound by traits: for instance, a function signature like
#![allow(unused)] fn main() { fn duplicate<C: Clone>(value: C) { ... } }
indicates that duplicate() is defined to be generic over any type C such
that C implements the Clone trait, and that the input to duplicate() will
be of this type C.
As a last note, traits can be marked as unsafe to denote that any
implementation of such a trait may need to rely on invariants that the Rust
compiler can't verify. One common example is the Sync trait, which types can
implement to indicate that they're safe to share between threads.
Because such traits can't be compiler-verified, the Rust compiler requires
implementations of them to be marked as unsafe as well, e.g.
#![allow(unused)] fn main() { struct MyStruct { ... } unsafe impl Send for MyStruct {} }
Submodule Overview
Our goal in this submodule is to modify an existing kernel capsule to "slip in" a function call that a (malicious) userspace app can trigger that compromises the overall system integrity. To make this a subtle attack, the attacker wants to hide this new function call in the kernel so that when the board maintainer updates to a new version of Tock the attack is present in the kernel.
For demonstration, we will insert a call to hardfault_all_apps(). This is of
course a sensitive API designed exclusively for testing. This API should not be
accessible to userspace, but we will see if an attacker can expose this to
userspace without the board maintainer knowing about the change.
Milestones
We additionally have two small milestones in this section: one to sneak some logic into our encryption oracle driver, and then one to add an application which uses it.
- Milestone one adds a minimal bit of logic to the encryption oracle driver which a userspace application can use to fault all running applications, but with the caveat that it requires the board definition to explicitly give it that permission.
- Milestone two adds a userspace application to trigger this driver, and then demonstrates how Tock performs language-level access control to capabilities which the Tock board definition has to explicitly grant.
Starter Code
Again as in the previous section, we have some starter code in libtock-c. The
only new directory we'll use is the questionable_service/ subdirectory in
libtock-c/examples/tutorials/root_of_trust/.
To launch this 'questionable' service which we'll use to trigger the
fault all processes driver, simply navigate as per the previous submodules to
the Questionable service in the on-device menu, select it, and then select
Start as usual.
Milestone One: Adding the Fault All Processes Driver
As a first step, we'll need to add some logic to our encryption oracle capsule.
Open tock/capsules/extra/src/tutorials/encryption_oracle_chkpt5.rs (the
completed encryption oracle driver) and do the following:
-
First, we need to ensure our compromised driver has a reference to the kernel, as well as a capability of generic type
C. This capability will be necessary in a second, but for now we take it for granted. Down where theEncryptionOracleDriverstruct is, add a new type parameterC: ProcessManagerCapability, and then akernelandcapabilitymember:#![allow(unused)] fn main() { pub struct EncryptionOracleDriver<'a, A: AES128<'a> + AES128Ctr, C: ProcessManagementCapability> { kernel: &'static kernel, capability: C, aes: &'a A, process_grants: Grant< ProcessState, ... >, ... } }Don't forget to add an import for
kernel::capabilities::ProcessManagementCapabilityandkernel::Kernelas well at the top of the file:#![allow(unused)] fn main() { use core::cell::Cell; use kernel::capabilities::ProcessManagementCapability; use kernel::grant::{AllowRoCount, AllowRwCount, Grant, UpcallCount}; ... use kernel::{ErrorCode, Kernel}; ... } -
Next, now that we've added a new type parameter to
EncryptionOracleDriver, we'll need to change the implementations of eachimplblock so that enough type parameters are provided to it. In theimplblock just below our newly-modified struct definition, we'll change#![allow(unused)] fn main() { impl<'a, A: AES128<'a> + AES128Ctr> EncryptionOracleDriver<'a, A> { ... } }to
#![allow(unused)] fn main() { impl<'a, A: AES128<'a> + AES128Ctr, C: ProcessManagementCapability> EncryptionOracleDriver<'a, A, C> { ... } }Later in the file, you'll also want to change
#![allow(unused)] fn main() { impl<'a, A: AES128<'a> + AES128Ctr> SyscallDriver for EncryptionOracleDriver<'a, A> { ... } }to
#![allow(unused)] fn main() { impl<'a, A: AES128<'a> + AES128Ctr, C: ProcessManagementCapability> SyscallDriver for EncryptionOracleDriver<'a, A, C> { ... } }and
#![allow(unused)] fn main() { impl<'a, A: AES128<'a> + AES128Ctr> Client<'a> for EncryptionOracleDriver<'a, A> { ... } }to
#![allow(unused)] fn main() { impl<'a, A: AES128<'a> + AES128Ctr, C: ProcessManagementCapability> Client<'a> for EncryptionOracleDriver<'a, A, C> { ... } } -
Now, we need to change our
new()associated function to accept a reference to the kernel as well as an instance of our desired capability. Addkernelandcapabilityas new arguments tonew(), and use them to construct the returnedEncryptionOracleDriver:#![allow(unused)] fn main() { /// Create a new instance of our encryption oracle userspace driver: pub fn new( kernel: &'static kernel, capability: C, aes: &'a A, source_buffer: &'static mut [u8], ... ) -> Self { EncryptionOracleDriver { kernel, capability, process_grants, aes, ... } } ... } -
Lastly, we want to sneak in our new logic. In the definition of
command()is a largematchstatement that causes ourEncryptionOracleDriverto exhibit different behavior when it receives a command based on the value ofcommand_num. We'll add a new branch for command number 2 to fault every application.#![allow(unused)] fn main() { impl<'a, A: AES128<'a> + AES128Ctr, C: ProcessManagementCapability> SyscallDriver for EncryptionOracleDriver<'a, A, C> { fn command( &self, command_num: usize, ... ) -> CommandReturn { match command_num { ... // Request the decryption operation: 1 => { ... } // Hardfault all applications 2 => { self.kernel.hardfault_all_apps(&self.capability); CommandReturn::success() } // Unknown command number, return a NOSUPPORT error _ => CommandReturn::failure(ErrorCode::NOSUPPORT), } } } }
With this, our changes to the driver are complete! Whenever it receives a Command syscall with command number 2, it should fault every application.
If we take a look at the implementation of the Kernel::hardfault_all_apps()
function we used, we'll see that it has signature
#![allow(unused)] fn main() { pub fn hardfault_all_apps<C: capabilities::ProcessManagementCapability>(&self, _c: &C) { ... } }
which indicates that to be called, it needs to accept an input of generic type
C which implements the trait capabilities::ProcessManagementCapability.
As such, we'll need to do two things when modifying our board definition:
- Create a new type (say
EncryptionOracleCapability) implementing thecapabilities::ProcessManagementCapabilitytrait. - Instantiate our new driver and provide it with an instance of our
EncryptionOracleCapabilitytype
Opening boards/tutorials/nrf52840dk-root-of-trust-tutorial/src/main.rs, we can
get started.
-
First, let's define our new
EncryptionOracleCapabilitytype. In Tock, theProcessManagementCapabilitywe need to implement is defined as follows:#![allow(unused)] fn main() { /// The `ProcessManagementCapability` allows the holder to control /// process execution, such as related to creating, restarting, and /// otherwise managing processes. pub unsafe trait ProcessManagementCapability {} }This is an unsafe trait with no methods, so we won't have to do much to implement it. Add the following right above the definition of
struct Platformin ourmain.rs:#![allow(unused)] fn main() { struct EncryptionOracleCapability; unsafe impl capabilities::ProcessManagementCapability for EncryptionOracleCapability {} }Note that if you don't include the
unsafein the second line,rustcwill error, stating that the trait in questionrequires an `unsafe impl` declaration. -
Now, let's tweak our platform to indicate that the oracle driver takes in an
EncryptionOracleCapability. You'll want to modify thePlatformstruct definition to read as follows:#![allow(unused)] fn main() { struct Platform { base: nrf52840dk_lib::Platform, screen: &'static ScreenDriver, oracle: &'static capsules_extra::tutorials::encryption_oracle_chkpt5::EncryptionOracleDriver< 'static, nrf52840::aes::AesECB<'static>, EncryptionOracleCapability, >, } } -
Lastly, in the actual
main()function just above the block comment indicatingPLATFORM SETUP, SCHEDULER, AND KERNEL LOOP,you'll want to modify the initialization of the encryption oracle driver to include our reference to the kernel and an instance of our capability.#![allow(unused)] fn main() { let oracle = static_init!( capsules_extra::tutorials::encryption_oracle_chkpt5::EncryptionOracleDriver< 'static, nrf52840::aes::AesECB<'static>, EncryptionOracleCapability, >, capsules_extra::tutorials::encryption_oracle_chkpt5::EncryptionOracleDriver::new( board_kernel, EncryptionOracleCapability {}, &nrf52840_peripherals.nrf52.ecb, aes_src_buffer, ... ), ); }You should now be able to build and install the kernel as usual; not much should be noticeably different until the next step.
Milestone Two: Triggering the Fault All Processes Driver
To actually trigger the driver, we'll need to send it a Command syscall with
command ID 1. We'll do this in two simple steps. To start, back in libtock-c,
rename questionable_service_starter/ to just questionable_service/.
If you get stuck, see questionable_service_milestone_one/.
-
First, as with the previous submodules, copy your implementations of
wait_for_start(),setup_logging(), andlog_to_screen(), and callwait_for_start()andsetup_logging()at the top ofmain(). -
Now, change main to perform the following:
-
Log to the screen that all apps are about to be hardfaulted
-
Trigger the hardfault driver using
command(), i.e.syscall_return_t cr = command(/* driver num */ 0x99999, /* command num */ 2, 0, 0); -
Add another log to screen (can be anything; this should never be reached, as the app should have already faulted)
Install and run the application. You should see that the first log appears, but
the second one never does. A fault dump should instead appear over the
tockloader listen console.
Now that we have a working setup, one question might be whether we can make do
without adding a noisy unsafe impl in our board definition file main.rs,
likely the first file someone would inspect.
One idea might be to move the unsafe impl into our driver code. Unfortunately,
if we try that, e.g. by moving the struct definition into
fault_all_proceses.rs and changing our Kernel::hardfault_all_apps() call to
#![allow(unused)] fn main() { struct EncryptionOracleCapability; unsafe impl capabilities::ProcessManagementCapability for FaultAllProcessesCapability {} impl<'a, A: AES128<'a> + AES128Ctr, C: ProcessManagementCapability> SyscallDriver for EncryptionOracleDriver<'a, A, C> { fn command( &self, command_num: usize, ... ) -> CommandReturn { match command_num { ... // Hardfault all applications 2 => { self.kernel.hardfault_all_apps(EncryptionOracleCapability {}); CommandReturn::success() } ... } } } }
then rustc will error, noting implementation of an `unsafe` trait. Indeed,
Tock drivers (and capsules in general!) cannot make use of unsafe constructs,
so any capabilities given to them must come from the board definition where
they can be more carefully audited. This makes following expected access control
policy a prerequisite for the kernel to compile.
Along with capabilities, disallowing unsafe code in drivers has many other
positive isolation effects. For instance, without access to unsafe, drivers
cannot use core functions like core::slice::from_raw_parts() to construct
slices to directly access memory, meaning they can only make use of memory
explicitly granted to them.
For more details on Tock's isolation mechanisms, see the Tock Design page on the website, as well as the EuroSec 2022 paper Tiered Trust for Useful Embedded Systems Security.
Security USB Key with Tock
This module and submodules will walk you through how to create a USB security key using Tock.

Hardware Notes
To fully follow this guide you will need a hardware board that supports a peripheral USB port (i.e. where the microcontroller has USB hardware support). We recommend using the nRF52840dk.
Compatible boards:
- nRF52840dk
- imix
You'll also need two USB cables, one for programming the board and the other for attaching it as a USB device.
Goal
Our goal is to create a standards-compliant HOTP USB key that we can use with a demo website. The key will support enrolling new URL domains and providing secure authentication.
The main logic of the key will be implemented as a userspace program. That userspace app will use the kernel to decrypt the shared key for each domain, send the HMAC output as a USB keyboard device, and store each encrypted key in a nonvolatile key-value storage.
nRF52840dk Hardware Setup

If you are using the nRF52840dk, there are a couple of configurations on the nRF52840DK board that you should double-check:
- The "Power" switch on the top left should be set to "On".
- The "nRF power source" switch in the top middle of the board should be set to "VDD".
- The "nRF ONLY | DEFAULT" switch on the bottom right should be set to "DEFAULT".
For now, you should plug one USB cable into the top of the board for programming (NOT into the "nRF USB" port on the side). We'll attach the other USB cable later.
Kernel Setup
This tutorial requires a Tock kernel configured with four specific capsules instantiated that may not be included by default with a particular kernel:
The easiest way to get a kernel image with these installed is to use the [HOTP tutorial configuration for the nRF52840dk] (https://github.com/tock/tock/tree/master/boards/tutorials/nrf52840dk-hotp-tutorial).
cd tock/boards/tutorials/nrf52840dk-hotp-tutorial
make install
But, you can also follow the guides to setup these capsules yourself in a different kernel setup or for a different board.
Organization and Getting Oriented to Tock
This module will refer to various Tock components. This section briefly describes the general structure of Tock that you will need to be somewhat familiar with to follow the module.
Using Tock consists of two main building blocks:
- The Tock kernel, which runs as the operating system on the board. This is compiled from the Tock repository.
- Userspace applications, which run as processes and are compiled and loaded separately from the kernel.
The Tock kernel is compiled specifically for a particular hardware device,
termed a "board". The location of the top-level file for the kernel on a
specific board is in the Tock repository, under /tock/boards/<board name>. Any
time you need to compile the kernel or edit the board file, you will go to that
folder. You also install the kernel on the hardware board from that directory.
Userspace applications are stored in a separate repository, either libtock-c or libtock-rs (for C and Rust applications, respectively). Those applications are compiled within those repositories.
Stages
This module is broken into three stages:
- Creating an HOTP userspace application.
- Creating an in-kernel encryption oracle.
- Enforcing access control restrictions to the oracle.
HOTP Userspace Application
As a reminder, this module guides you through creating a USB security key: a USB device that can be connected to your computer and authenticate you to some service.
At this point, we have configured the Tock kernel to provide the baseline resources necessary to implement the USB security key and use it with real services. However, we still need to actually implement the security key's operational logic. This submodule will guide you through creating a userspace application that follows the HOTP protocol.
Background
HOTP USB Security Keys
One open standard for implementing USB security keys is HMAC-based One-Time Password (HOTP). It generates the 6 to 8 digit numeric codes which are used as a second-factor for some websites.
These security keys typically do not just calculate HOTP codes, but can also enter them to your computer automatically. We will also enable that functionality by having our devices function as a USB HID keyboard device as well. This means that when plugged in through the proper USB port, it appears as an additional keyboard to your computer and is capable of entering text.
Applications in Tock
Tock applications look much closer to applications on traditional OSes than to normal embedded software. They are compiled separately from the kernel and loaded separately onto the hardware. They can be started or stopped individually and can be removed from the hardware individually. Moreover, the kernel decides which applications to run and what permissions they should be given.
Applications make requests to the OS kernel through system calls. Applications
instruct the kernel using "command" system calls, and the kernel notifies
applications with "upcalls". Importantly, upcalls never interrupt a running
application. The application must yield to receive upcalls (i.e. callbacks).
The userspace library ("libtock") wraps system calls in easier to use functions.
The libtock library is completely asynchronous. Synchronous APIs to the system
calls are in "libtock-sync". These functions include the call to yield and
expose a synchronous driver interface. Application code can use either.
Submodule Overview
This stage builds up to a full-featured HOTP key application. We'll start with a basic HOTP application which has a pre-compiled HOTP secret key. Then, each milestone will add additional functionality:
- Milestone one adds user input to reconfigure the HOTP secret.
- Milestone two adds persistent storage for the HOTP information so it is remembered across resets and power cycles.
- Milestone three adds support for multiple HOTP secrets simultaneously.
We have provided starter code as well as completed code for each of the milestones. If you're facing some bugs which are limiting your progress, you can reference or even wholesale copy a milestone in order to advance to the next parts of the tutorial.
Setup
There are two steps to check before you begin:
-
Make sure you have compiled and installed the Tock kernel with the USB HID, HMAC, and KV drivers on to your board.
-
Make sure you have no testing apps installed. To remove all apps:
tockloader erase-apps
Starter Code
We'll start with the starter code which implements a basic HOTP key.
-
Within
libtock-c, navigate tolibtock-c/examples/tutorials/hotp/hotp_starter/.This contains the starter code for the HOTP application. It has a hardcoded HOTP secret and generates an HOTP code from it each time the Button 1 on the board is pressed.
-
Compile the application and load it onto your board. In the app directory, run:
make tockloader install -
To see console output from the application, run
tockloader listenin a separate terminal.TIP: You can leave the console running, even when compiling and uploading new applications. It's worth opening a second terminal and leaving
tockloader listenalways running. -
Since this application creates a USB HID device to enter HOTP codes, you'll need a second USB cable which will connect directly to the microcontroller. If you are using the nRF52840dk, plug the USB cable into the port on the left-hand side of the nRF52840DK labeled "nRF USB".
After attaching the USB cable, you should restart the application by hitting the reset button (on the nRF52840DK it is labeled "IF BOOT/RESET").
-
To generate an HOTP code, press the first button ("Button 1" on the nRF5240DK). You should see a message printed to console output that says
Counter: 0. Typed "750359" on the USB HID the keyboard.The HOTP code will also be written out over the USB HID device. The six-digit number should appear wherever your cursor is.
-
Verify the HOTP values with https://www.verifyr.com/en/otp/check#hotp. Go to section "#2 Generate HOTP Code". Once there, enter:
- "test" as the HOTP Code to auth
- The current counter value from console as the Counter
- "sha256" as the Algorithm
- 6 as the Digits
Click "Generate" and you'll see a six-digit HOTP code that should match the output of the Tock HOTP app.
The source code for this application is in the file main.c.
This is roughly 300 lines of code and includes Button handling, HMAC use and the
HOTP state machine. Execution starts at the main() function at the bottom of
the file.
Play around with the app and take a look through the code to make sure it makes sense. Don't worry too much about the HOTP next code generation, as it already works and you won't have to modify it.
Checkpoint: You should be able to run the application and have it output HOTP codes over USB to your computer when Button 1 is pressed.
Milestone One: Configuring Secrets
The first milestone is to modify the HOTP application to allow the user to set a
secret, rather than having a pre-compiled default secret. Completed code is
available in the hotp_milestone_one/ folder in case you run into issues.
-
Modify the code in
main()to detect when a user wants to change the HOTP secret rather than get the next code.The simplest way to do this is to sense how long the button is held for. You can delay a short period, roughly 500 ms would work well, and then read the button again and check if it's still being pressed. You can wait synchronously with the
libtocksync_alarm_delay_ms()function and you can read a button with thelibtock_button_read()function.-
Note that buttons are indexed from 0 in Tock. So "Button 1" on the hardware is button number 0 in the application code. All four of the buttons on the nRF52840DK are accessible, although the
initialize_buttons()helper function in main.c only initializes interrupts for button number 0. (You can change this if you want!) -
An alternative design would be to use different buttons for different purposes. We'll focus on the first method, but feel free to implement this however you think would work best.
-
-
For now, just print out a message when you detect the user's intent. Be sure to compile and upload your modified application to test it.
-
Next, create a new helper function to allow for programming new secrets. This function will have three parts:
-
The function should print a message about wanting input from the user.
- Let them know that they've entered this mode and that they should type a new HOTP secret.
-
The function should read input from the user to get the base32-encoded secret.
-
You'll want to use the Console functions
libtocksync_console_write()andlibtocksync_console_read().libtocksync_console_read()can read characters of user input whilelibtocksync_console_write()can be used to echo each character the user types. Make a loop that reads the characters into a buffer. -
Since the secret is in base32, special characters are not valid. The easiest way to handle this is to check the input character with
isalnum()and ignore it if it isn't alphanumeric. -
When the user hits the enter key, a
\nor\rcharacter will be received. This can be used to break from the loop.
-
-
The function should decode the secret and save it in the
hotp-key.- Use the
program_default_secret()implementation for guidance here. Thedefault_secrettakes the place of the string you read from the user, but otherwise the steps are the same.
- Use the
-
-
Connect the two pieces of code you created to allow the user to enter a new key. Then upload your code to test it!
- You can test that the new secret works with https://www.verifyr.com/en/otp/check#hotp as described previously.
Checkpoint: Your HOTP application should now take in user-entered secrets and generate HOTP codes for them based on button presses.
Milestone Two: Persistent Secrets
The second milestone is to save the HOTP struct in persistent flash rather than
in volatile memory. After doing so, the secret and current counter values will
persist after resets and when the USB device is unplugged. We'll do the saving
to flash with the Key-Value driver, which allows an application to save
information as key-value pairs. Completed code is available in
hotp_milestone_two/ in case you run into issues.
-
In the HOTP application code we will store the persistent key data as the "value" in a key-value pair.
Start by writing a function which saves the
hotp_key_tobject to a specific key (perhaps "hotp"). Use thelibtocksync_kv_set()function. -
Now write a matching function which reads the same key to load the key data from persistent storage. Use the
libtocksync_kv_get()function. -
Make sure to update the key-value pair whenever part of the HOTP key is modified, i.e. when programming a new secret or updating the counter.
-
Make sure your app has permissions to use storage in the kernel. The app needs a TBF header to grant it permission. You can have the app automatically include this when compiling by adding these flags to the app Makefile:
# Make sure we have storage permissions. ELF2TAB_ARGS += --write_id 0x4016 --read_ids 0x4016 --access_ids 0x4016 -
Upload your code to test it. You should be able to keep the same secret and counter value on resets and also on power cycles.
- There is an on/off switch on the top left of the nRF52840DK you can use for power cycling.
Checkpoint: Your application should now both allow for the configuring of HOTP secrets and the HOTP secret and counter should be persistent across reboots.
Milestone Three: Multiple HOTP Keys
The third and final application milestone is to add multiple HOTP keys and a
method for choosing between them. This milestone is optional, as the rest of
the tutorial will work without it. If you're short on time, you can skip it
without issue. Completed code is available in hotp_milestone_three/ in case
you run into issues.
-
The recommended implementation of multiple HOTP keys is to assign one key per button (so four total for the nRF52840DK). A short press will advance the counter and output the HOTP code while a long press will allow for reprogramming of the HOTP secret.
-
The implementation here is totally up to you. Here are some suggestions to consider:
-
Select which key you are using based on the button number of the most recent press. You'll also need to enable interrupts for all of the buttons instead of just Button 1.
-
Make the HOTP key into an array with up to four slots. Choose different key names for storage.
-
Having multiple key slots allows for different numbers of digits for the HOTP code on different slots, which you could experiment with.
-
Checkpoint: Your application should now hold multiple HOTP keys, each of which can be configured and is persistent across reboots.
Encryption Oracle Capsule
Our HOTP security key works by storing a number of secrets on the device, and using these secrets together with some moving factor (e.g., a counter value or the current time) in an HMAC operation. To be useful, our device needs some way to store these secrets, for instance in its internal flash.
However, storing such secrets in plaintext as we did in the previous submodule is not particularly secure. For instance, many microcontrollers offer debug ports which can be used to gain read and write access to flash. Even if these ports can be locked down, such protection mechanisms have been broken in the past. Apart from that, disallowing external flash access makes debugging and updating our device much more difficult.
To circumvent these issues, we will build an encryption oracle capsule: this Tock kernel module will allow applications to request decryption of some ciphertext, using a kernel-internal key not exposed to applications themselves. By only storing an encrypted version of their secrets, applications are free to use unprotected flash storage, or store them even external to the device itself. This is a commonly used paradigm in root of trust systems such as TPMs or OpenTitan, which feature hardware-embedded keys that are unique to a chip and hardened against key-readout attacks.
Our kernel module will use a hard-coded symmetric encryption key (AES-128 CTR-mode), embedded in the kernel binary. While this does not actually meaningfully increase the security of our example application, it demonstrates some important concepts in Tock:
- How custom userspace drivers are implemented, and the different types of system calls supported.
- How Tock implements asynchronous APIs in the kernel.
- Tock's hardware-interface layers (HILs), which provide abstract interfaces for hardware or software implementations of algorithms, devices and protocols.
Background
Capsules – Tock's Kernel Modules
Most of Tock's functionality is implemented in the form of capsules – Tock's
equivalent to kernel modules. Capsules are Rust modules contained in Rust crates
under the capsules/ directory within the Tock kernel repository. They can be
used to implement userspace drivers, hardware drivers (for example, a driver for
an I²C-connected sensor), or generic reusable code snippets.
What makes capsules special is that they are semi-trusted: they are not
allowed to contain any unsafe Rust code, and thus can never violate Tock's
memory safety guarantees. They are only trusted with respect to liveness and
correctness – meaning that they must not block the kernel execution for long
periods of time, and should behave correctly according to their specifications
and API contracts.
Capsule Directory in the Tock Repository
While a single "capsule" is generally self-contained in a Rust module (.rs
file), these modules are again grouped into Rust crates such as capsules/core
and capsules/extra, depending on certain policies. For instance, capsules in
core have stricter requirements regarding their code quality and API
stability. Neither core nor the extra extra capsules crates allow for
external dependencies (outside of the Tock repository).
The document on external dependencies
further explains these policies.
Developing the Encryption Oracle
We start our encryption oracle driver by creating a new capsule called
encryption_oracle. Create a file under
capsules/extra/src/tutorials/encryption_oracle.rs in the Tock kernel
repository with the following contents:
#![allow(unused)] fn main() { // Licensed under the Apache License, Version 2.0 or the MIT License. // SPDX-License-Identifier: Apache-2.0 OR MIT // Copyright Tock Contributors 2024. pub static KEY: &'static [u8; kernel::hil::symmetric_encryption::AES128_KEY_SIZE] = b"InsecureAESKey12"; pub struct EncryptionOracleDriver {} impl EncryptionOracleDriver { /// Create a new instance of our encryption oracle userspace driver: pub fn new() -> Self { EncryptionOracleDriver {} } } }
This is the basic skeleton for a Tock capsule.
To make this capsule accessible to other Rust modules and crates, add it to
capsules/extra/src/tutorials/mod.rs:
#[allow(dead_code)]
pub mod encryption_oracle_chkpt5;
+ pub mod encryption_oracle;
EXERCISE: Make sure your new capsule compiles by running
cargo checkin thecapsules/extra/folder.
The capsules/tutorial crate already contains checkpoints of the encryption
oracle capsule we'll be writing here. Feel free to use them if you're stuck. We
indicate that your capsule should have reached an equivalent state to one of our
checkpoints through blocks such as the following:
CHECKPOINT:
encryption_oracle_chkpt0.rs
Userspace Drivers
Now that we have a basic capsule skeleton, we can think about how this code is
going to interact with userspace applications. Not every capsule needs to offer
a userspace API, but those that do must implement
the SyscallDriver trait.
Tock supports different types of application-issued systems calls, four of which are relevant to userspace drivers:
-
subscribe: Allows an application to register upcalls, which are functions being invoked in response to certain events.
-
read-only allow: Allows an application to share a buffer with a kernel module. The kernel only has read access to the buffer.
-
read-write allow: Same as the read-only allow, but kernel modules can also mutate the application-provided buffer.
-
command: Allows applications to signal arbitrary events or send requests to the kernel module.
All Tock system calls are synchronous, which means that they should immediately return to the application. Capsules must not implement long-running operations by blocking on a command system call.
More information can be found in the syscalls documentation.
Application Grants
Now there's just one key part missing to understanding Tock's system calls: how kernel modules store application-specific data. To avoid using a standard heap, which could be exhausted and leave the kernel in an unrecoverable state, Tock uses grants. Grants are essentially regions of the application's allocated memory space that the kernel uses to store state on behalf of the process. This is distinct from an allow as the application never has access to grant data. More information can be found in the grants documentation.
Our encryption oracle driver will need to keep track of some per-process state.
Thus we extend the above driver with a Rust struct to be stored within a grant,
called ProcessState. For now, we just keep track of whether a process has
requested a decryption operation. Add the following code snippet to your
capsule:
#![allow(unused)] fn main() { #[derive(Default)] pub struct ProcessState { request_pending: bool, } }
By implementing Default, grant types can be allocated and initialized on
demand. We integrate this type into our EncryptionOracleDriver by adding a
special process_grants variable of
type Grant. This Grant
struct takes a generic type parameter T (which we set to our ProcessState
struct above) next to some constants: as a driver's subscribe upcall and allow
buffer slots also consume some memory, we store them in the process-specific
grant as well. Thus, UpcallCount, AllowRoCont, and AllowRwCount indicate
how many of these slots should be allocated respectively. For now we don't use
any of these slots, so we set their counts to zero. Add the process_grants
variable to your EncryptionOracleDriver:
#![allow(unused)] fn main() { use kernel::grant::{Grant, UpcallCount, AllowRoCount, AllowRwCount}; pub struct EncryptionOracleDriver { process_grants: Grant< ProcessState, UpcallCount<0>, AllowRoCount<0>, AllowRwCount<0>, >, } }
EXERCISE: The
Grantstruct will be provided as an argument to constructor of theEncryptionOracleDriver. Extendnewto accept it as an argument. Afterwards, make sure your code compiles by runningcargo checkin thecapsules/extra/directory.
Implementing a System Call
Next we can start to implement a proper system call. We start with the basics and implement a simple command-type system call: upon request by the application, the Tock kernel will call a method in our capsule.
For this, we implement the following SyscallDriver trait for our
EncryptionOracleDriver struct. This trait contains two important methods:
command: this method is called whenever an application issues a command-type system call towards this driver, andallocate_grant: this is a method required by Tock to allocate some space in the process' memory region. The implementation of this method always looks the same, and while it must be implemented by every userspace driver, it's exact purpose is not important right now.
#![allow(unused)] fn main() { use kernel::{ErrorCode, ProcessId}; use kernel::syscall::{SyscallDriver, CommandReturn}; impl SyscallDriver for EncryptionOracleDriver { fn command( &self, command_num: usize, _data1: usize, _data2: usize, processid: ProcessId, ) -> CommandReturn { // Syscall handling code here! unimplemented!() } // Required by Tock for grant memory allocation. fn allocate_grant(&self, processid: ProcessId) -> Result<(), kernel::process::Error> { self.process_grants.enter(processid, |_, _| {}) } } }
The function signature of command tells us a lot about what we can do with
this type of system call:
- Applications can provide a
command_num, which indicates what type of command they are requesting to be handled by a driver, and - they can optionally pass up to two
usizedata arguments. - The kernel further provides us with a unique identifier of the calling
process, through a type called
ProcessId.
Our driver can respond to this system call using a CommandReturn struct. This
struct allows for returning either a success or a failure indication, along
with some data (at most four usize return values). For more details, you can
look at its definition and API
here.
In our encryption oracle driver we only need to handle a single application
request: to decrypt some ciphertext into its corresponding plaintext. As we are
missing the actual cryptographic operations still, let's simply store that a
process has made such a request. Because this is per-process state, we store it
in the request_pending field of the process' grant region. To obtain a
reference to this memory, we can conveniently use the ProcessId type provided
to us by the kernel. The following code snippet shows how an implementation of
the command could look like. Replace your command method body with this
snippet:
#![allow(unused)] fn main() { match command_num { // Check whether the driver is present: 0 => CommandReturn::success(), // Request the decryption operation: 1 => { self .process_grants .enter(processid, |app, _kernel_data| { kernel::debug!("Received request from process {:?}", processid); app.request_pending = true; CommandReturn::success() }) .unwrap_or_else(|err| err.into()) }, // Unknown command number, return a NOSUPPORT error _ => CommandReturn::failure(ErrorCode::NOSUPPORT), } }
There's a lot to unpack here: first, we match on the passed command_num. By
convention, command number 0 is reserved to check whether a driver is loaded
on a kernel. If our code is executing, then this must be the case, and thus we
simply return success. For all other unknown command numbers, we must instead
return a NOSUPPORT error.
Command number 1 is assigned to start the decryption operation. To get a
reference to our process-local state stored in its grant region, we can use the
enter method: it takes a ProcessId, and in return will call a provided Rust
closure that provides us access to the process' own ProcessState instance.
Because entering a grant can fail (for instance when the process does not have
sufficient memory available), we handle any errors by converting them into a
CommandReturn.
EXERCISE: Make sure that your
EncryptionOracleDriverimplements theSyscallDrivertrait as shown above. Then, verify that your code compiles by runningcargo checkin thecapsules/extra/folder.
CHECKPOINT:
encryption_oracle_chkpt1.rs
Congratulations, you have implemented your first Tock system call! Next we will add a resource to the kernel module.
Including an AES Engine in the Driver
Our encryption oracle will encrypt the HOTP keys before we store them to flash. Therefore it needs access to an encryption engine. We will use AES.
We provide the encryption_oracle_chkpt2.rs checkpoint which has these changes
integrated, feel free to use this code. We make the following mechanical changes
to our types and constructor – don't worry about them too much right now.
First, we change our EncryptionOracleDriver struct to hold a reference to some
generic type A, which must implement the AES128 and the AESCtr traits:
+ use kernel::hil::symmetric_encryption::{AES128Ctr, AES128};
- pub struct EncryptionOracleDriver {
+ pub struct EncryptionOracleDriver<'a, A: AES128<'a> + AES128Ctr> {
+ aes: &'a A,
process_grants: Grant<
ProcessState,
UpcallCount<0>,
Then, we change our constructor to accept this aes member as a new argument:
- impl EncryptionOracleDriver {
+ impl<'a, A: AES128<'a> + AES128Ctr> EncryptionOracleDriver<'a, A> {
/// Create a new instance of our encryption oracle userspace driver:
pub fn new(
+ aes: &'a A,
+ _source_buffer: &'static mut [u8],
+ _dest_buffer: &'static mut [u8],
process_grants: Grant<ProcessState, UpcallCount<0>, AllowRoCount<0>, AllowRwCount<0>>,
) -> Self {
EncryptionOracleDriver {
process_grants: process_grants,
+ aes: aes,
}
}
}
And finally we update our implementation of SyscallDriver to match these new
types:
- impl SyscallDriver for EncryptionOracleDriver {
+ impl<'a, A: AES128<'a> + AES128Ctr> SyscallDriver for EncryptionOracleDriver<'a, A> {
fn command(
&self,
Make sure that your modified capsule still compiles. We will actual use the AES engine later. Next, we will look into how to to integrate this driver into a kernel build.
CHECKPOINT:
encryption_oracle_chkpt2.rs
Adding a Capsule to a Tock Kernel
To actually make our driver available in a given build of the kernel, we need to assign it a number and add it to our board's main.rs.
Specifying the Driver Number
Applications interact with our driver by passing a "driver number" alongside
their system calls. The capsules/core/src/driver.rs module acts as a registry
for driver numbers. For the purposes of this tutorial we'll use an unassigned
driver number in the misc range, 0x99999, and add a constant to capsule
accordingly:
#![allow(unused)] fn main() { pub const DRIVER_NUM: usize = 0x99999; }
Instantiating the System Call Driver
Now, open the board's main file (for example
boards/tutorials/nrf52840dk-hotp-tutorial/src/main.rs) and scroll down to the
line that reads "PLATFORM SETUP, SCHEDULER, AND START KERNEL LOOP". We'll
instantiate our encryption oracle driver right above that, with the following
snippet:
#![allow(unused)] fn main() { const CRYPT_SIZE: usize = 7 * kernel::hil::symmetric_encryption::AES128_BLOCK_SIZE; let aes_src_buffer = kernel::static_init!([u8; 16], [0; 16]); let aes_dst_buffer = kernel::static_init!([u8; CRYPT_SIZE], [0; CRYPT_SIZE]); let oracle = static_init!( capsules_extra::tutorials::encryption_oracle::EncryptionOracleDriver< 'static, nrf52840::aes::AesECB<'static>, >, // Call our constructor: capsules_extra::tutorials::encryption_oracle::EncryptionOracleDriver::new( &nrf52840_peripherals.nrf52.ecb, aes_src_buffer, aes_dst_buffer, // Magic incantation to create our `Grant` struct: board_kernel.create_grant( capsules_extra::tutorials::encryption_oracle::DRIVER_NUM, // our driver number &create_capability!(capabilities::MemoryAllocationCapability) ), ), ); // Leave commented out for now: // kernel::hil::symmetric_encryption::AES128::set_client(&nrf52840_peripherals.nrf52.ecb, oracle); }
If you are using a microcontroller other than the nRF52840, you will need to modify the types slightly and provide the correct reference to the AES hardware engine.
Now that we instantiated our capsule, we need to wire it up to Tock's system
call handling facilities. This involves two steps: first, we need to store our
instance in our Platform struct. That way, we can refer to our instance while
the kernel is running. Then, we need to route system calls to our driver number
(0x99999) to be handled by this driver.
Add the following line to the very bottom of the pub struct Platform {
declaration:
struct Platform {
[...],
base: nrf52840dk_lib::Platform,
+ oracle: &'static capsules_extra::tutorials::encryption_oracle::EncryptionOracleDriver<
+ 'static,
+ nrf52840::aes::AesECB<'static>,
+ >,
}
Furthermore, add our instantiated oracle to the let platform = Platform {
instantiation:
let platform = Platform {
[...],
screen,
+ oracle,
};
Finally, to handle received system calls in our driver, add the following line
to the match block in the with_driver method of the SyscallDriverLookup
trait implementation:
impl SyscallDriverLookup for Platform {
fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R
where
F: FnOnce(Option<&dyn kernel::syscall::SyscallDriver>) -> R,
{
match driver_num {
capsules_extra::hmac::DRIVER_NUM => f(Some(self.hmac)),
[...],
capsules_extra::app_flash_driver::DRIVER_NUM => f(Some(self.app_flash)),
+ capsules_extra::tutorials::encryption_oracle::DRIVER_NUM => f(Some(self.oracle)),
_ => self.base.with_driver(driver_num, f),
}
}
}
That's it! We have just added a new driver to the nRF52840DK's Tock kernel build.
EXERCISE: Make sure your board compiles by running
make. If you want, you can test your driver with a libtock-c application which executes the following:command( 0x99999, // driver number 1, // command number 0, 0 // optional data arguments );Upon receiving this system call, the capsule should print the "Received request from process" message.
Interacting with HILs
The Tock operating system supports multiple hardware platforms, each with
different implementations and hardware peripherals. To provide consistent
intefaces to kernel modules, Tock uses Hardware-Interface Layers (HILs). HILs
can be found under the
kernel/src/hil/
directory. We will be working with the
symmetric_encryption.rs HIL.
You can read more about the design paradigms of HILs in
this document.
HILs capture another important concept of the Tock kernel: asynchronous
operations. Operations in the Tock kernel are implemented as asynchronous
two-phase operations: one function call on the underlying implementation
(e.g., of our AES engine) starts an operation, and another function call (issued
by the underlying implementation) informs the driver that the operation has
completed. You can see this paradigm embedded in all of Tock's HILs, including
the symmetric_encryption HIL: the
crypt() method
is specified to return immediately (and return a Some(_) in case of an error).
When the requested operation is finished, the implementor of AES128 will call
the
crypt_done() callback,
on the client registered with
set_client().
The below figure illustrates the way asynchronous operations are handled in
Tock, using our encryption oracle capsule as an example. One further detail
illustrated in this figure is the fact that providers of a given interface
(e.g., AES128) may not always be able to perform a large user-space operation
in a single call; this may be because of hardware-limitations, limited buffer
allocations, or to avoid blocking the kernel for too long in
software-implementations. In this case, a userspace-operation is broken up into
multiple smaller operations on the underlying provider, and the next
sub-operation is scheduled once a callback has been received:

To allow our capsule to receive crypt_done callbacks, add the following trait
implementation:
#![allow(unused)] fn main() { use kernel::hil::symmetric_encryption::Client; impl<'a, A: AES128<'a> + AES128Ctr> Client<'a> for EncryptionOracleDriver<'a, A> { fn crypt_done(&'a self, mut source: Option<&'static mut [u8]>, destination: &'static mut [u8]) { unimplemented!() } } }
With this trait implemented, we can wire up the oracle driver instance to
receive callbacks from the AES engine (nrf52840_peripherals.nrf52.ecb) by
uncommenting the following line in main.rs:
- // Leave commented out for now:
- // kernel::hil::symmetric_encryption::AES128::set_client(&nrf52840_peripherals.nrf52.ecb, oracle);
+ kernel::hil::symmetric_encryption::AES128::set_client(&nrf52840_peripherals.nrf52.ecb, oracle);
If this is missing, our capsule will not be able to receive feedback from the AES hardware that an operation has finished, and it will thus refuse to start any new operation. This is an easy mistake to make – you should check whether all callbacks are set up correctly when the kernel is in such a stuck state.
Multiplexing Between Processes
While our underlying AES128 implementation can only handle one request at a
time, multiple processes may wish to use this driver. Thus our capsule
implements a queueing system: if our capsule is busy, another process can still
mark a request which will set the request_pending flag in our ProcessState
grant. Even better, we've already implemented the logic to set this flag!
Now, to actually implement our asynchronous decryption operation, it is
important to keep track of which process' request we are currently working on.
We add an additional state field to our EncryptionOracleDriver holding an
OptionalCell:
this is a container whose stored value can be modified even if we only hold an
immutable Rust reference to it. The optional indicates that it behaves similar
to an Option – it can either hold a value, or be empty.
use kernel::utilities::cells::OptionalCell;
pub struct EncryptionOracleDriver<'a, A: AES128<'a> + AES128Ctr> {
aes: &'a A,
process_grants: Grant<ProcessState, UpcallCount<0>, AllowRoCount<0>, AllowRwCount<0>>,
+ current_process: OptionalCell<ProcessId>,
}
We need to add it to the constructor as well:
pub fn new(
aes: &'a A,
_source_buffer: &'static mut [u8],
_dest_buffer: &'static mut [u8],
process_grants: Grant<ProcessState, UpcallCount<0>, AllowRoCount<0>, AllowRwCount<0>>,
) -> Self {
EncryptionOracleDriver {
process_grants,
aes,
+ current_process: OptionalCell::empty(),
}
}
In practice, we simply want to find the next process request to work on. For
this, we add a helper method to the impl of our EncryptionOracleDriver:
#![allow(unused)] fn main() { /// Return a `ProcessId` which has `request_pending` set, if there is some: fn next_pending(&self) -> Option<ProcessId> { unimplemented!() } }
EXERCISE: Try to implement this method according to its specification. If you're stuck, see whether the documentation of the
OptionalCellandGranttypes help. Hint: to interact with theProcessStateof every processes, you can use theitermethod on aGrant: the returnedItertype then has anentermethod access the contents of an individual process' grant.
CHECKPOINT:
encryption_oracle_chkpt3.rs
Interacting with Process Buffers and Scheduling Upcalls
For our encryption oracle, it is important to allow users to provide buffers containing the encryption initialization vector (to prevent an attacker from inferring relationships between messages encrypted with the same key), and the plaintext or ciphertext to encrypt and decrypt respectively. Furthermore, userspace must provide a mutable buffer for our capsule to write the operation's output to. These buffers are placed into read-only and read-write allow slots by applications accordingly. We allocate fixed IDs for those buffers:
#![allow(unused)] fn main() { /// Ids for read-only allow buffers mod ro_allow { pub const IV: usize = 0; pub const SOURCE: usize = 1; /// The number of allow buffers the kernel stores for this grant pub const COUNT: u8 = 2; } /// Ids for read-write allow buffers mod rw_allow { pub const DEST: usize = 0; /// The number of allow buffers the kernel stores for this grant pub const COUNT: u8 = 1; } }
To deliver upcalls to the application, we further allocate an allow-slot for the
DONE callback:
#![allow(unused)] fn main() { /// Ids for subscribe upcalls mod upcall { pub const DONE: usize = 0; /// The number of subscribe upcalls the kernel stores for this grant pub const COUNT: u8 = 1; } }
Now, we need to update our Grant type to actually reserve these new allow and
subscribe slots:
pub struct EncryptionOracleDriver<'a, A: AES128<'a> + AES128Ctr> {
aes: &'a A,
process_grants: Grant<
ProcessState,
- UpcallCount<0>,
- AllowRoCount<0>,
- AllowRwCount<0>,
+ UpcallCount<{ upcall::COUNT }>,
+ AllowRoCount<{ ro_allow::COUNT }>,
+ AllowRwCount<{ rw_allow::COUNT }>,
>,
Update this type signature in your constructor as well.
While Tock applications can expose certain sections of their memory as buffers to the kernel, access to the buffers is limited while their grant region is entered (implemented through a Rust closure). Unfortunately, this implies that asynchronous operations cannot keep a hold of these buffers and use them while other code (or potentially the application itself) is executing.
For this reason, Tock uses static mutable slices (&'static mut [u8]) in
HILs. These Rust types have the distinct advantage that they can be passed
around the kernel as "persistent references": when borrowing a 'static
reference into another 'static reference, the original reference becomes
inaccessible. Tock features a special container to hold such mutable references,
called TakeCell. We add such a container for each of our source and
destination buffers:
use core::cell::Cell;
use kernel::utilities::cells::TakeCell;
pub struct EncryptionOracleDriver<'a, A: AES128<'a> + AES128Ctr> {
[...],
current_process: OptionalCell<ProcessId>,
+ source_buffer: TakeCell<'static, [u8]>,
+ dest_buffer: TakeCell<'static, [u8]>,
+ crypt_len: Cell<usize>,
}
) -> Self {
EncryptionOracleDriver {
process_grants: process_grants,
aes: aes,
current_process: OptionalCell::empty(),
+ source_buffer: TakeCell::new(source_buffer),
+ dest_buffer: TakeCell::new(dest_buffer),
+ crypt_len: Cell::new(0),
}
}
Now we have all pieces in place to actually drive the AES implementation. As
this is a rather lengthy implementation containing a lot of specifics relating
to the AES128 trait, this logic is provided to you in the form of a single
run() method. Fill in this implementation from encryption_oracle_chkpt4.rs:
#![allow(unused)] fn main() { use kernel::processbuffer::ReadableProcessBuffer; use kernel::hil::symmetric_encryption::AES128_BLOCK_SIZE; /// The run method initiates a new decryption operation or /// continues an existing two-phase (asynchronous) decryption in /// the context of a process. /// /// If the process-state `offset` is `0`, we will initialize the /// AES engine with an initialization vector (IV) provided by the /// application, and configure it to perform an AES128-CTR /// operation. /// /// If the process-state `offset` is larger or equal to the /// process-provided source or destination buffer size, we return /// an error of `ErrorCode::NOMEM`. A caller can use this as a /// method to check whether the descryption operation has /// finished. fn run(&self, processid: ProcessId) -> Result<(), ErrorCode> { // Copy in the provided code from `encryption_oracle_chkpt4.rs` unimplemented!() } }
A core part still missing is actually invoking this run() method, namely for
each process that has its request_pending flag set. As we need to do this each
time an application requests an operation, as well as each time we finish an
operation (to work on the next enqueued) one, this is implemented in a helper
method called run_next_pending.
#![allow(unused)] fn main() { /// Try to run another decryption operation. /// /// If `self.current_current` process contains a `ProcessId`, this /// indicates that an operation is still in progress. In this /// case, do nothing. /// /// If `self.current_process` is vacant, use your implementation /// of `next_pending` to find a process with an active request. If /// one is found, remove its `request_pending` indication and start // a new decryption operation with the following call: /// /// self.run(processid) /// /// If this method returns an error, return the error to the /// process in the registered upcall. Try this until either an /// operation was started successfully, or no more processes have /// pending requests. /// /// Beware: you will need to enter a process' grant both to set the /// `request_pending = false` and to (potentially) schedule an error /// upcall. `self.run()` will itself also enter the grant region. /// However, *Tock's grants are non-reentrant*. This means that trying /// to enter a grant while it is already entered will fail! fn run_next_pending(&self) { unimplemented!() } }
EXERCISE: Implement the
run_next_pendingmethod according to its specification. To schedule a process upcall, you can use the second argument passed into thegrant.enter()method (kernel_data):kernel_data.schedule_upcall( <upcall slot>, (<arg0>, <arg1>, <arg2>) )By convention, errors are reported in the first upcall argument (
arg0). You can convert anErrorCodeinto ausizewith the following method:kernel::errorcode::into_statuscode(<error code>)
run_next_pending should be invoked whenever we receive a new encryption /
decryption request from a process, so add it to the command() method
implementation:
// Request the decryption operation:
- 1 => self
- .process_grants
- .enter(processid, |grant, _kernel_data| {
- grant.request_pending = true;
- CommandReturn::success()
- })
- .unwrap_or_else(|err| err.into()),
+ 1 => {
+ let res = self
+ .process_grants
+ .enter(processid, |grant, _kernel_data| {
+ grant.request_pending = true;
+ CommandReturn::success()
+ })
+ .unwrap_or_else(|err| err.into());
+
+ self.run_next_pending();
+
+ res
+ }
We store res temporarily, as Tock's grant regions are non-reentrant: we can't
invoke run_next_pending (which will attempt to enter grant regions), while
we're in a grant already.
CHECKPOINT:
encryption_oracle_chkpt4.rs
Now, to complete our encryption oracle capsule, we need to implement the
crypt_done() callback. This callback performs the following actions:
- copies the in-kernel destination buffer (
&'static mut [u8]) as passed tocrypt()into the process' destination buffer through its grant, and - attempts to invoke another encryption / decryption round by calling
run().- If calling
run()succeeds, anothercrypt_done()callback will be scheduled in the future. - If calling
run()fails with an error ofErrorCode::NOMEM, this indicates that the current operation has been completed. Invoke the process' upcall to signal this event, and use ourrun_next_pending()method to schedule the next operation.
- If calling
Similar to the run() method, we provide this snippet to you in
encryption_oracle_chkpt5.rs:
#![allow(unused)] fn main() { use kernel::processbuffer::WriteableProcessBuffer; impl<'a, A: AES128<'a> + AES128Ctr> Client<'a> for EncryptionOracleDriver<'a, A> { fn crypt_done(&'a self, mut source: Option<&'static mut [u8]>, destination: &'static mut [u8]) { // Copy in the provided code from `encryption_oracle_chkpt5.rs` unimplemented!() } } }
CHECKPOINT:
encryption_oracle_chkpt5.rs
Congratulations! You have written your first Tock capsule and userspace driver, and interfaced with Tock's asynchronous HILs. Your capsule should be ready to go now, go ahead and integrate it into your HOTP application! Don't forget to recompile your kernel such that it integrates the latest changes.
Integrating the Encryption Oracle Capsule into your libtock-c App
The encryption oracle capsule is compatible with the oracle.c and oracle.h
implementation in the libtock-c part of the tutorial, under
examples/tutorials/hotp/hotp_oracle_complete/.
You can try to integrate this with your application by using the interfaces
provided in oracle.h. The main.c file in this repository contains an example
of how these interfaces can be integrated into a fully-featured HOTP
application.
Security Key Application Access Control
At this point we have a fully-featured HOTP USB security key implementation. However, the kernel APIs that enable this are exposed to any application running on the system. In this submodule, we will use additional features of the Tock kernel to restrict access to the encryption capsule to only trusted (credentialed) apps.
Background
We need two Tock mechanisms to implement this feature. First, we need a way to identify the trusted app that we will give access to the encryption engine. We will do this by adding credentials to the app's TBF (Tock Binary Format file) and verifying those credentials when the application is loaded. This mechanism allows developers to sign apps, and then the kernel can verify those signatures.
The second mechanism is way to permit syscall access to only specific applications. The Tock kernel already has a hook that runs on each syscall to check if the syscall should be permitted. By default this just approves every syscall. We will need to implement a custom policy which permits access to the encryption capsule to only the trusted HOTP apps.
Module Overview
Our goal is to add credentials to Tock apps, verify those credentials in the kernel, and then permit only verified apps to use the encryption oracle API. To keep this simple we will use a simple SHA-256 hash as our credential, and verify that the hash is valid within the kernel.
Step 1: Credentialed Apps
To implement our access control policy we need to include an offline-computed SHA256 hash with the app TBF, and then check it when running the app. The SHA256 credential is simple to create, and serves as a stand-in for more useful credentials such as cryptographic signatures.
This will require a couple pieces:
- We need to actually include the hash in our app.
- We need a mechanism in the kernel to check the hash exists and is valid.
Signing Apps
We can use Tockloader to add a hash to a compiled app. This will require Tockloader version 1.10.0 or newer.
First, compile the app:
$ cd libtock-c/examples/blink
$ make
Now, add the hash credential:
$ tockloader tbf credential add sha256
It's fine to add to all architectures or you can specify which TBF to add it to.
To check that the credential was added, we can inspect the TAB:
$ tockloader inspect-tab
You should see output like the following:
$ tockloader inspect-tab
[INFO ] No TABs passed to tockloader.
[STATUS ] Searching for TABs in subdirectories.
[INFO ] Using: ['./build/blink.tab']
[STATUS ] Inspecting TABs...
TAB: blink
build-date: 2023-06-09 21:52:59+00:00
minimum-tock-kernel-version: 2.0
tab-version: 1
included architectures: cortex-m0, cortex-m3, cortex-m4, cortex-m7
Which TBF to inspect further? cortex-m4
cortex-m4:
version : 2
header_size : 104 0x68
total_size : 16384 0x4000
checksum : 0x722e64be
flags : 1 0x1
enabled : Yes
sticky : No
TLV: Main (1) [0x10 ]
init_fn_offset : 41 0x29
protected_size : 0 0x0
minimum_ram_size : 5068 0x13cc
TLV: Program (9) [0x20 ]
init_fn_offset : 41 0x29
protected_size : 0 0x0
minimum_ram_size : 5068 0x13cc
binary_end_offset : 8360 0x20a8
app_version : 0 0x0
TLV: Package Name (3) [0x38 ]
package_name : blink
TLV: Kernel Version (8) [0x4c ]
kernel_major : 2
kernel_minor : 0
kernel version : ^2.0
TLV: Persistent ACL (7) [0x54 ]
Write ID : 11 0xb
Read IDs (1) : 11
Access IDs (1) : 11
TBF Footers
Footer
footer_size : 8024 0x1f58
Footer TLV: Credentials (128)
Type: SHA256 (3) ✓ verified
Length: 32
Footer TLV: Credentials (128)
Type: Reserved (0)
Length: 7976
Note at the bottom, there is a Footer TLV with SHA256 credentials! Because
tockloader was able to double-check the hash was correct there is ✓ verified
next to it.
SUCCESS: We now have an app with a hash credential!
Verifying Credentials in the Kernel
To have the kernel check that our hash credential is present and valid, we need to add a credential checker before the kernel starts each process. For Tock's credential checking architecture, this actually requires three pieces:
- The app checking policy that verifies SHA256 credentials.
- An AppID assignment policy that assigns identifiers to applications with verified credentials.
- A credential checking engine that iterates over each process binary and checks all provided credentials.
To create these, we'll edit the board's main.rs file in the kernel. Tock
includes a basic SHA256 credential checker, so we can use that. We also will use
an AppID assigner that creates the ID based on the process's name.
The following code should be added to the main.rs file somewhere before the
platform setup occurs (probably right after the encryption oracle capsule from
the last module!).
#![allow(unused)] fn main() { //-------------------------------------------------------------------------- // CREDENTIALS CHECKING POLICY //-------------------------------------------------------------------------- // Create the software-based SHA engine. let sha = components::sha::ShaSoftware256Component::new() .finalize(components::sha_software_256_component_static!()); // Create the credential checker. let checking_policy = components::appid::checker_sha::AppCheckerSha256Component::new(sha) .finalize(components::app_checker_sha256_component_static!()); // Create the AppID assigner. let assigner = components::appid::assigner_name::AppIdAssignerNamesComponent::new() .finalize(components::appid_assigner_names_component_static!()); // Create the process checking machine. let checker = components::appid::checker::ProcessCheckerMachineComponent::new(checking_policy) .finalize(components::process_checker_machine_component_static!()); }
That code creates a checker object. We will use that checker when processes
are loaded. Now we setup the process loader which uses the process checker. This
should go at the end of main(), replacing the existing call to
kernel::process::load_processes:
#![allow(unused)] fn main() { let process_binary_array = static_init!( [Option<kernel::process::ProcessBinary>; NUM_PROCS], [None, None, None, None, None, None, None, None] ); let loader = static_init!( kernel::process::SequentialProcessLoaderMachine< nrf52840::chip::NRF52<Nrf52840DefaultPeripherals>, >, kernel::process::SequentialProcessLoaderMachine::new( checker, &mut *addr_of_mut!(PROCESSES), process_binary_array, board_kernel, chip, core::slice::from_raw_parts( core::ptr::addr_of!(_sapps), core::ptr::addr_of!(_eapps) as usize - core::ptr::addr_of!(_sapps) as usize, ), core::slice::from_raw_parts_mut( core::ptr::addr_of_mut!(_sappmem), core::ptr::addr_of!(_eappmem) as usize - core::ptr::addr_of!(_sappmem) as usize, ), &FAULT_RESPONSE, assigner, &process_management_capability ) ); checker.set_client(loader); loader.register(); loader.start(); }
Compile and install the updated kernel.
SUCCESS: We now have a kernel that can check credentials!
Installing Apps and Verifying Credentials
Now, our kernel will only run an app if it has a valid SHA256 credential. To verify this, recompile and install the blink app but do not add credentials:
cd libtock-c/examples/blink
touch main.c
make
tockloader install --erase
Now, we can list the processes on the board with the process console. Note we
need to run the console-start command to active the tock process console.
$ tockloader listen
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAF0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
console-start
tock$
Now we can list the processes:
tock$ list
PID Name Quanta Syscalls Restarts Grants State
tock$
Tip: You can re-disable the process console by using the
console-stopcommand.
You can see our app is not there because it failed to load due to lack of proper credentials.
To fix this, we can add the SHA256 credential.
cd libtock-c/examples/blink
tockloader tbf credential add sha256
tockloader install
Now when we list the processes, we see:
tock$ list
PID ShortID Name Quanta Syscalls Restarts Grants State
0 0x3be6efaa blink 0 323 0 1/16 Yielded
And we can verify the app is both running and now has a specifically assigned short ID.
Permitting Both Credentialed and Non-Credentialed Apps
The default operation is not quite what we want. We want all apps to run, but only credentialed apps to have access to the syscalls.
To allow all apps to run, even if they don't pass the credential check, we need to configure our checker. Doing that is actually quite simple. We just need to modify the credential checker we are using to not require credentials.
In tock/capsules/system/src/process_checker/basic.rs, modify the
require_credentials() function to not require credentials:
#![allow(unused)] fn main() { impl AppCredentialsChecker<'static> for AppCheckerSha256 { fn require_credentials(&self) -> bool { false // change from true to false } ... } }
Then recompile and install. Now even a non-credentialed process should run:
tock$ list
PID ShortID Name Quanta Syscalls Restarts Grants State
0 Unique c_hello 0 8 0 1/16 Yielded
SUCCESS: We now can determine if an app is credentialed or not!
Step 2: Permitting Syscalls for only Credentialed Apps
Our second step is to implement a policy that permits syscall access to the encryption capsule only for credentialed apps. All other syscalls should be permitted.
Tock provides the SyscallFilter trait to do this. An object that implements
this trait is used on every syscall to check if that syscall should be executed
or not. By default all syscalls are permitted.
The interface looks like this:
#![allow(unused)] fn main() { pub trait SyscallFilter { // Return Ok(()) to permit the syscall, and any Err() to deny. fn filter_syscall( &self, process: &dyn process::Process, syscall: &syscall::Syscall, ) -> Result<(), errorcode::ErrorCode> { Ok(()) } } }
We need to implement the single filter_syscall() function with out desired
behavior.
To do this, create a new file called syscall_filter.rs in the board's src/
directory. Then insert the code below as a starting point:
#![allow(unused)] fn main() { use kernel::errorcode; use kernel::platform::SyscallFilter; use kernel::process; use kernel::syscall; pub struct TrustedSyscallFilter {} impl SyscallFilter for TrustedSyscallFilter { fn filter_syscall( &self, process: &dyn process::Process, syscall: &syscall::Syscall, ) -> Result<(), errorcode::ErrorCode> { // To determine if the process has credentials we can use the // `process.short_app_id()` function. // Now inspect the `syscall` the app is calling. If the `driver_numer` // is not XXXXXX, then return `Ok(())` to permit the call. Otherwise, if // the process is not credentialed, return `Err(ErrorCode::NOSUPPORT)`. If // the process is credentialed return `Ok(())`. } } }
Documentation for the Syscall type is
here.
Save this file and include it from the board's main.rs:
#![allow(unused)] fn main() { mod syscall_filter }
Now to put our new policy into effect we need to use it when we configure the
kernel via the KernelResources trait.
#![allow(unused)] fn main() { impl KernelResources for Platform { ... type SyscallFilter = syscall_filter::TrustedSyscallFilter; ... fn syscall_filter(&self) -> &'static Self::SyscallFilter { self.sysfilter } ... } }
Also you need to instantiate the TrustedSyscallFilter:
#![allow(unused)] fn main() { let sysfilter = static_init!( syscall_filter::TrustedSyscallFilter, syscall_filter::TrustedSyscallFilter {} ); }
and add it to the Platform struct:
#![allow(unused)] fn main() { struct Platform { ... sysfilter: &'static syscall_filter::TrustedSyscallFilter, } }
Then when we create the platform object near the end of main(), we can add our
checker:
#![allow(unused)] fn main() { let platform = Platform { ... sysfilter, } }
SUCCESS: We now have a custom syscall filter based on app credentials.
Verifying HOTP Now Needs Credentials
Now you should be able to install your HOTP app to the board without adding the SHA256 credential and verify that it is no longer able to access the encryption capsule. You should see output like this:
$ tockloader listen
Tock HOTP App Started. Usage:
* Press a button to get the next HOTP code for that slot.
* Hold a button to enter a new HOTP secret for that slot.
Flash read
Initialized state
ERROR cannot encrypt key
If you use tockloader to add credentials
(tockloader tbf credential add sha256) and then re-install your app it should
run as expected.
Wrap-up
You now have implemented access control on important kernel resources and enabled your app to use it. This provides platform builders robust flexibility in architecting the security framework for their devices.
Using the HOTP USB Security Key
With our fully functional USB security key, we can now put it to use.
Thread Networking Tutorials
Tock provides two Thread networking tutorials:
Both tutorials introduce Thread networking in Tock in addition to a number of other concepts. The temperature sensor tutorial assumes no familiarity with Tock and introduces the concepts surrounding syscalls, callbacks, and interprocess communication. Conversely, the encrypted sensor data tutorial jumps straight into setting up a Thread network in Tock and introduces how Tock and a root of trust can provide enhanced security in IoT settings.
Thread Router Setup
Note: If you are a participant at a hosted tutorial, we have already set up a thread router. You should skip this step and go straight to the start of the tutorial.
Please do not set up your own router during a hosted tutorial, as this may confuse other tutorial participants.
All Tock Thread Networking tutorials require a Thread router to be present. We provide a pre-built flash image that is specific to each thread tutorial: ot-central-controller.hex encrypted-sensor-data-router.hex.
Flashing the Binary
The steps for flashing each respective binary are the same. Depending on which
tutorial you are doing, please use the corresponding hex file. For simplicity
we will reference the hex file you will use as {ROUTER_HEX_FILE}.
You can flash this binary with an arbitrary tool that can program hex files,
such as JLinkExe or probe-rs. It may be that you need to reset the board
after flashing, for example by pressing the physical RESET button.
$ probe-rs
probe-rs download --chip nRF52840_xxAA --format hex {ROUTER_HEX_FILE}
Erasing ✔ [00:00:13] [##########] 516.00 KiB/516.00 KiB @ 37.43 KiB/s (eta 0s )
Programming ✔ [00:00:11] [########] 516.00 KiB/516.00 KiB @ 46.68 KiB/s (eta 0s )
Finished in 24.86s
$ JLinkExe
SEGGER J-Link Commander V7.94a (Compiled Dec 6 2023 16:07:30)
DLL version V7.94a, compiled Dec 6 2023 16:07:07
Connecting to J-Link via USB...O.K.
Firmware: J-Link OB-SAM3U128-V2-NordicSemi compiled Oct 30 2023 12:12:17
Hardware version: V1.00
J-Link uptime (since boot): 0d 00h 08m 40s
S/N: 683487279
License(s): RDI, FlashBP, FlashDL, JFlash, GDB
USB speed mode: High speed (480 MBit/s)
VTref=3.300V
Type "connect" to establish a target connection, '?' for help
J-Link>connect
Please specify device / core. <Default>: NRF52840_XXAA
Type '?' for selection dialog
Device>NRF52840_XXAA
Please specify target interface:
J) JTAG (Default)
S) SWD
T) cJTAG
TIF>S
Specify target interface speed [kHz]. <Default>: 4000 kHz
Speed>
Device "NRF52840_XXAA" selected.
Connecting to target via SWD
InitTarget() start
InitTarget() end - Took 2.79ms
Found SW-DP with ID 0x2BA01477
DPIDR: 0x2BA01477
CoreSight SoC-400 or earlier
Scanning AP map to find all available APs
AP[2]: Stopped AP scan as end of AP map has been reached
AP[0]: AHB-AP (IDR: 0x24770011)
AP[1]: JTAG-AP (IDR: 0x02880000)
Iterating through AP map to find AHB-AP to use
AP[0]: Core found
AP[0]: AHB-AP ROM base: 0xE00FF000
CPUID register: 0x410FC241. Implementer code: 0x41 (ARM)
Found Cortex-M4 r0p1, Little endian.
Cortex-M: The connected J-Link (S/N 683487279) uses an old firmware module: V1 (current is 2)
FPUnit: 6 code (BP) slots and 2 literal slots
CoreSight components:
ROMTbl[0] @ E00FF000
[0][0]: E000E000 CID B105E00D PID 000BB00C SCS-M7
[0][1]: E0001000 CID B105E00D PID 003BB002 DWT
[0][2]: E0002000 CID B105E00D PID 002BB003 FPB
[0][3]: E0000000 CID B105E00D PID 003BB001 ITM
[0][4]: E0040000 CID B105900D PID 000BB9A1 TPIU
[0][5]: E0041000 CID B105900D PID 000BB925 ETM
Memory zones:
Zone: "Default" Description: Default access mode
Cortex-M4 identified.
J-Link>loadfile {ROUTER_HEX_FILE}
'loadfile': Performing implicit reset & halt of MCU.
Reset: Halt core after reset via DEMCR.VC_CORERESET.
Reset: Reset device via AIRCR.SYSRESETREQ.
Downloading file [{ROUTER_HEX_FILE}]...
J-Link: Flash download: Bank 0 @ 0x00000000: 1 range affected (528384 bytes)
J-Link: Flash download: Total: 17.932s (Prepare: 0.161s, Compare: 0.045s, Erase: 10.840s, Program & Verify: 6.757s, Restore: 0.128s)
J-Link: Flash download: Program & Verify speed: 76 KB/s
O.K.
J-Link>quit
Interacting with the Router
Once you have flashed this image, it should provide you with an OpenThread CLI
on the serial console. You can use this to inspect the state of the device, such
as through tockloader listen:
$ tockloader listen
[INFO ] Using "/dev/ttyACM0 - J-Link - CDC".
[INFO ] Listening for serial output.
> state
leader
Done
You can get a list of attached devices through child table:
> child table
| ID | RLOC16 | Timeout | Age | LQ In | C_VN |R|D|N|Ver|CSL|QMsgCnt|Suprvsn| Extended MAC |
+-----+--------+------------+------------+-------+------+-+-+-+---+---+-------+-------+------------------+
| 1 | 0x1801 | 240 | 67 | 3 | 107 |1|1|1| 4| 0 | 0 | 129 | 0a5e0b97af0631ae |
Done
Wireless Networking
We now will utilize Tock's network capabilities to connect our board to a Thread network.
Before starting to develop this app, please remove any existing apps from the board using the following tockloader command:
$ tockloader erase-appsImportantly, be sure you flash the correct kernel image by running
$ make installin the Tock
boards/tutorials/nrf52840dk-thread-tutorialdirectory.
Background
IEEE 802.15.4
To facilitate wireless communication, Tock provides an IEEE 802.15.4 network stack. IEEE 802.15.4 (hence forth abbreviated 15.4) is a physical (PHY) and media access control (MAC) specification that is purpose-built for low-rate wireless personal area networks.
Notable examples of popular wireless network technologies utilizing 15.4 include:
- Thread
- Zigbee
- 6LoWPAN
- ISA100.11a
Tock exposes 15.4 functionality to userspace through a series of command syscalls. Within the kernel, a 15.4 capsule and a 15.4 radio driver serve to virtualize radio resources across other kernel endpoints and applications. To provide platform agnostic 15.4 logic, Tock prescribes a 15.4 radio Hardware Interface Layer (HIL) that must be implemented for each 15.4 radio supported by Tock.
Thread
Thread networking is a low-power and low-latency wireless mesh networking protocol built using a 15.4, 6LoWPAN, and UDP network stack. Notably, each Thread node possess a globally addressable IPv6 address given Thread's adoption of 6LoWPAN (an IPv6 compression scheme). Although we will not exhaustively describe Thread here, we will provide a brief overview and pointers to more in-depth resources that further describe Thread.
Thread devices fit into two broadly generalized device types: routers and children. Routers often possess a non-constrained power supply (i.e., "plugged in") while children are often power constrained battery devices. Children form a star topology around their respective parent router while routers maintain a mesh network amongst routers. This division of responsibilities allows for the robustness and self-healing capabilities a mesh network provides while not being prohibitive to power constrained devices.
Further resources on Thread networking can be found here.
Tock and OpenThread
OpenThread is an open source implementation of the Thread standard. This implementation is the "de facto" Thread implementation.
For a given platform to support OpenThread, the platform must provide:
- IEEE 802.15.4 radio
- Random Number Generator
- Alarm
- Nonvolatile Storage
These functionalities are provided to OpenThread using OpenThread's platform abstraction layer (PAL) that a given platform implements as the "glue" between the OpenThread stack and the platform's hardware.
OpenThread is a popular network stack supported by other embedded platforms (e.g. Zephyr). Typically, the OpenThread PAL is exposed either directly to hardware or links directly to the kernel. Tock faces a unique design challenge in supporting OpenThread as the Tock kernel's threat model explicitly bans external dependencies.
Subsequently, Tock provides an OpenThread port that runs as an application. This
provides the added benefit that a bug in OpenThread will not cause the entire
system to crash and that a faulting OpenThread app can be recovered and
restarted by the Tock kernel without affecting other apps. The libtock-c
OpenThread port can be found in the libtock-c/libopenthread directory for
further details. libopenthread directly checks out the upstream
OpenThread repository and as such
possesses the entire set of OpenThread APIs.
Now that we have a primer for OpenThread let's continue our tutorial!
- If you are completing the Temperature Sensor Tutorial click here!
- If you are completing the Encrypted Sensor Data Tutorial click here!
OpenThread Temperature Sensor Network with Tock
This module and submodules will walk you through how to create a Tock temperature sensor network mote that communicates over a Thread network.
Hardware Notes
This tutorial requires a Tock-supported board that has an IEEE 802.15.4-compatible radio and supports Thread. While any such board should work, we recommend the nRF52840DK and assume this board is used throughout this tutorial.
Compatible boards:
- All Tock-supported boards with an
nRF52840chip, such as:
Project Setting
In this project we want to demonstrate how the Tock operating system can function as a flexible and reliable platform to build integrated systems. In particular, we demonstrate Tock's ability to run mutliple, mutually-distrustful applications on a single microcontroller, and it's IEEE 802.15.4 / Thread communications stack.
To demonstrate these features, we will build an HVAC control system for a shared office environment. Each employee will have access to their own HVAC control unit, connected to the central HVAC system through a Thread network. As the temperature set point can be a contencious subject, we allow each employee to enter their desired temperature. In turn, their control unit will display the average temperature set across all controllers, in addition to the current temperature at the control unit. We use Tock's OpenThread-based communications stack and its ability to run multiple concurrent applications to build this control unit (mote).
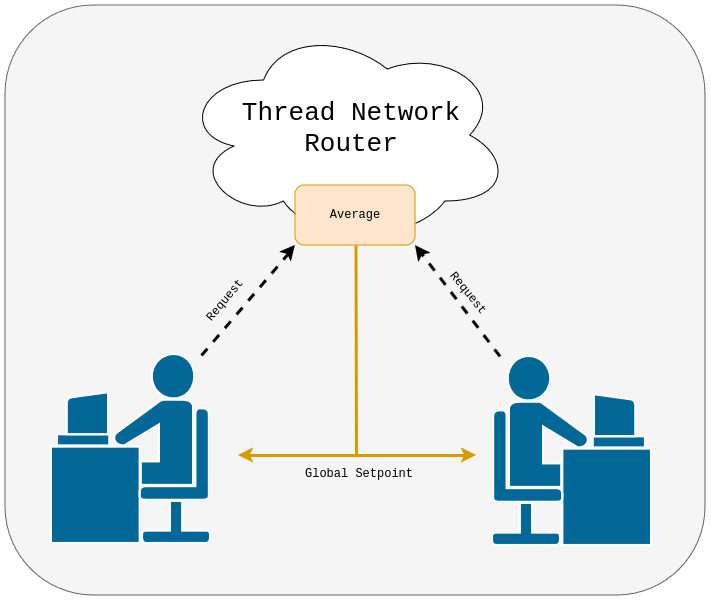
We divide the mote's functionality into three separate applications:
- The screen app drives the connected screen to display the current temperature and the local and global-average set points.
- The sensor app gathers readings from the
nRF52840's internal temperature sensor and exposes them to the control application. - Last but not least, the communication app is responsible for exchanging data with other participants using the Thread network.

By decoupling the sensor and communication applications, the Tock kernel ensures that the mote can remain responsive even in the case of failures in either application. In this tutorial we demonstratate this by injecting a bug into the communication application and deliberately faulting it with a malicious packet.
Software Prerequisites
- Getting Started Guide
- Rust
- Make
- GCC for ARM and RISC-V
- Tockloader Python Package
nRF52840dk Hardware Setup
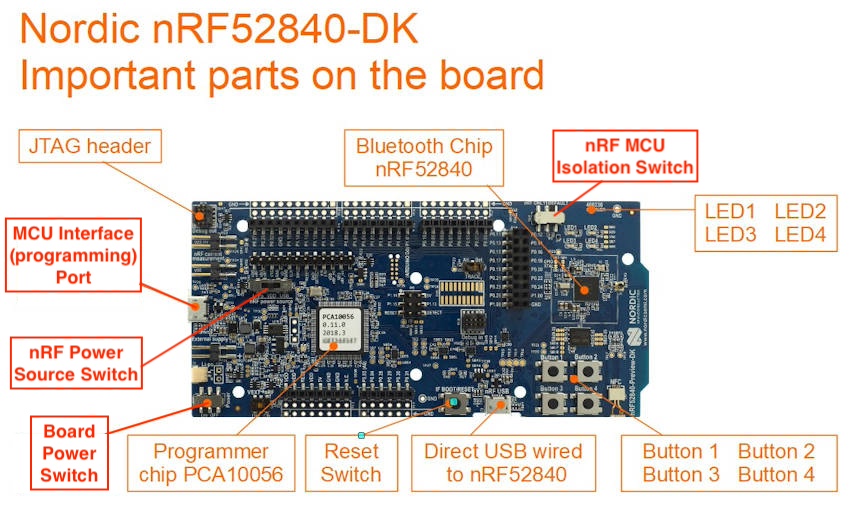
Make sure the switches and jumpers are properly configured on your board:
- The board "Power" switch on the bottom left should be set to "On".
- The "nRF power source" switch in the top middle of the board should be set to
"VDD".
- Note: If you have a screen already attached, this switch is partially hidden underneath the screen.
- The isolation switch, labeled "nRF ONLY | DEFAULT", on the top right should be set to "DEFAULT".
You should plug one USB cable into the side of the board for programming (NOT into the "nRF USB" port on the bottom right).
If you have a SSD1306-based screen with I2C pins, you should attach it to pins
P1.10 (SDA) and P1.11 (SCL).
See this diagram for the full configuration:
┌────────────────┬───┬─────────────────┐
│┌POWER┐ │USB│← PROG/DEBUG │
││ ON ▓│ └───┘ │
││OFF ░│ │
│└─────┘ ┌──DEBUG──┐ │
│ │VDD nRF ▪│ P0.27 □ │
│ │VDD nRF ▪│ P0.26 □ │
│ □ VDD ┌SOURCE┐│SWD SEL ▪│ P0.02 □ │
│ □ VDD │LiPo ░││ SWD IO ▪│ GND □ │
│ □ RESET │ VDD ▓││SWD CLK ▪│ P1.15 □ │
VCC →│ ▣ VDD │ USB ░││ SWO ▪│ P1.14 □ │
│ □ 5V └──────┘│ RESET ▪│ P1.13 □ │
│ □ GND │ ▪│ P1.12 □ │
GND →│ ▣ GND ┌────┐│ VIN ▪│ P1.11 ▣ │← I2C SCL
│ □ NC │JTAG││ VDDHV ▪│ P1.10 ▣ │← I2C SDA
│ ┐ │ ││ VDDHV ▪│ │
│ □ P0.03 │ └────┘│ VIOREF ▪│ P1.08 □ │
│ □ P0.04 A │ ▪│ P1.07 □ │
│ □ P0.28 D └─────────┘ P1.06 □ │
│ □ P0.29 C P1.05 □ │
│ □ P0.30 │ P1.04 □ │
│ □ P0.31 │ P1.03 □ │
│ ┘ P1.02 □ │
│ P1.01 □ │
│ │
│ P0.10 □ │
│ P0.09 □ │
│ P0.08 □ │
│ ☉ RESET P0.07 □ │
│ BTN P0.06 □ │
├───┐ P0.05 □ │
│USB│ nRF P0.01 □ │
│ │← PERIPHERAL P0.00 □ │
├───┘ ┌─────┐│
│ │░ nRF││
│BTN3 BTN1 │▓ DEF││
│ ☉ ☉ └─────┘│
│BTN4 BTN2 LED3 LED1 │
│ ☉ ☉ □ □ │
│ ┌───┐ LED4 LED2 │
│ ┌─┐ │nRF│ □ □ │
│ │ │NFC └───┘ │
│ └─┘ │
└─── ───────────────┘
╲ ╱
──────────────────
Organization and Getting Oriented to Tock
Tock consists of multiple inter-working components. We briefly describe the general structure of Tock and will deep-dive into these components throughout the tutorial:
A Tock system contains primarily two components:
- The Tock kernel, which runs as the operating system on the board. This is compiled from the Tock repository.
- Userspace applications, which run as processes and are compiled and loaded separately from the kernel.
The Tock kernel is compiled specifically for a particular hardware device,
termed a "board". Tock provides a set of reference board files under
/boards/<board name>. Any
time you need to compile the kernel or edit the board file, you will go to that
folder. You also install the kernel on the hardware board from that directory.
While the Tock kernel is written entirely in Rust, it supports userspace applications written in multiple languages. In particular, we provide two userspace libraries for application development in C and Rust respectively:
libtock-cfor C applications ( tock/libtock-c )libtock-rsfor Rust applications ( tock/libtock-rs )
We will use libtock-c in this tutorial. Its example applications are located
in the /examples
directory of the libtock-c repository.
Thread Router
For this tutorial, we assume that one nRF52840DK is dedicated to be a Thread router board. As a participant in a hosted tutorial, you will likely not need to set this up yourself. However, we do provide a pre-built image and some instructions for how to set up this router as well.
Stages
We divide this tutorial into five stages, with checkpoints that you can use to skip ahead. Each stage contains information on how to obtain all checkpoint-code required for it.
-
Sensor Application: We start by creating a simple application that reads the
nRF52840DKinternal temperature sensor and prints the current temperature onto the console.This demonstrates how you can flash a Tock kernel and applications onto your development board, and introduces some key Tock concepts.
-
Following this, we develop the communication application. This application will let our mote join the Thread network.
-
We continue by adding the screen application. This app will:
- Receive user input to set the desired temperature.
- Display the measured temperature, desired temperature setpoint, and global setpoint to the attached OLED screen.
-
Taking these three applications, we then add IPC functionality to allow for passing data between applications.
-
Finally, we demonstrate how Tock's mutually distrustful application model can protect the system from misbehavior in any given app.
Sound good? Let's get started.
Writing a Temperature-Sensor App on Tock
In this stage, we write a simple application that will ask the Tock kernel for our chip's current temperature and then print this value to the serial console. By the end of this submodule, you will know how to:
- Compile and flash the Tock kernel.
- Compile and flash a
libtock-capplication. - Interact with the tock process console.
- Interact with Tock syscalls.
Compiling and Installing the Kernel
For this tutorial, we provide a Tock kernel configuration that exposes all
required peripherals to userspace applications. It is based on the
nrf52840dk
base board defition and adds an additional driver instantiation for the
SSD1306 1.3" OLED screen we are using in this tutorial.
You can compile this configuration board by entering into its respective
directory and typing make:
$ cd tock/boards/tutorials/nrf52840dk-thread-tutorial
# ^^^^this is your checkout of github.com/tock/tock
$ make
[...]
Compiling nrf52_components v0.1.0 (/home/leons/proj/tock/kernel/boards/nordic/nrf52_components)
Compiling nrf52840dk v0.1.0 (/home/leons/proj/tock/kernel/boards/nordic/nrf52840dk)
Finished `release` profile [optimized + debuginfo] target(s) in 11.09s
text data bss dec hex filename
233474 36 41448 274958 4320e tock/target/thumbv7em-none-eabi/release/nrf52840dk-thread-tutorial
cb0df7abb1...d47b383aaf tock/target/thumbv7em-none-eabi/release/nrf52840dk-thread-tutorial.bin
To flash the kernel onto your nRF52840DK development board, make sure that you use the debug USB port (skinny-side, not "nRF USB" on the wide edge). Then type
$ make install
tockloader flash --address 0x00000 --board nrf52dk --jlink tock/kernel/target/thumbv7em-none-eabi/release/nrf52840dk-thread-tutorial.bin
[INFO ] Using settings from KNOWN_BOARDS["nrf52dk"]
[STATUS ] Flashing binary to board...
[INFO ] Finished in 9.901 seconds
If these commands fail, ensure that you have all of rustup, tockloader, and
the SEGGER J-Link software installed. You can test your connection with the
integrated J-Link debug probe by running:
$ JLinkExe
SEGGER J-Link Commander V7.94a (Compiled Dec 6 2023 16:07:30)
DLL version V7.94a, compiled Dec 6 2023 16:07:07
Connecting to J-Link via USB...O.K.
Firmware: J-Link OB-SAM3U128-V2-NordicSemi compiled Oct 30 2023 12:12:17
Hardware version: V1.00
J-Link uptime (since boot): 0d 00h 39m 40s
S/N: 683487279
License(s): RDI, FlashBP, FlashDL, JFlash, GDB
USB speed mode: High speed (480 MBit/s)
VTref=3.300V
And verify your tockloader install with:
$ tockloader --version
1.13.0 # (or newer)
Connecting to the Tock Kernel
You can connect to your board's serial console using tockloader or any other
serial console application. If your development board presents two console
devices, the lower-numbered one is usually correct. Select 115200 baud, 1 stop
bit, no partity, no flow control. The following command should also do the
trick:
$ tockloader listen
By default, a Tock board without any applications will respond with a message similar to:
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAC0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
tock$
If you don't see this prompt, try hitting ENTER or pressing the RESET button
on your board (near the unused, wide-side USB port).
In the case where you a selection dialog similar to that below, the nRF52840DK
exposes the chip's serial console on the lowest UART port (e.g., ttyACM0
instead of ttyACM1). If selecting ttyACM0 or similar does not work, simply
try all the available ports:
$ tockloader listen
[INFO ] No device name specified. Using default name "tock".
[INFO ] No serial port with device name "tock" found.
[INFO ] Found 2 serial ports.
Multiple serial port options found. Which would you like to use?
[0] /dev/ttyACM1 - J-Link - CDC
[1] /dev/ttyACM0 - J-Link - CDC
Which option? [0] 1
[INFO ] Using "/dev/ttyACM0 - J-Link - CDC".
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAC0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
tock$
The small shell above is called the "process console". It allows you to start
and stop applications, and control other parts of the tock kernel. For instance,
reset will completely reset your chip, re-printing the above greeting. Use
help to obtain a list of commands.
CHECKPOINT: You can interact with the process console.
Compiling and Installing an Application
With the kernel running we can now load applications onto our board. Tock
applications are compiled and loaded separately from the kernel. For this
tutorial we will use the libtock-c userspace library, whose source is located
outside of the kernel repository
at github/tock/libtock-c.
We provide some scaffolding for this tutorial. Make sure to enter the following directory:
$ cd libtock-c/examples/tutorials/thread_tutorials/temperature_sensor/
$ ls
00_sensor_hello
01_sensor_final
[...]
These applications represent checkpoints for different milestones of this
tutorial. If you are ever stuck on something, you can try running or looking at
the subsequent checkpoint. We'll start the tutorial off at checkpoint
00_sensor_hello. Whenever we reach a checkpoint, we indicate this through a
message like the following:
CHECKPOINT:
00_sensor_hello
If you are ever struggling, you can always jump ahead by working from one of our checkpoints. Lets get started by making a copy of this initial checkpoint to work from:
$ cp -r 00_sensor_hello my_sensor
To compile and flash this application, we enter into its directory and run the following command:
$ cd my_sensor
$ make install
[...]
Application size report for arch family cortex-m:
Application size report for arch family rv32i:
text data bss dec hex filename
3708 204 2716 6628 19e4 build/cortex-m0/cortex-m0.elf
[...]
13944 816 10864 25624 6418 (TOTALS)
text data bss dec hex filename
4248 100 2716 7064 1b98 build/rv32imac/rv32imac.0x20040080.0x80002800.elf
[...]
51432 1000 27160 79592 136e8 (TOTALS)
[INFO ] Using openocd channel to communicate with the board.
[INFO ] Using settings from KNOWN_BOARDS["nrf52dk"]
[STATUS ] Installing app on the board...
[INFO ] Flashing app org.tockos.thread-tutorial.sensor binary to board.
[INFO ] Finished in 1.737 seconds
Once the binary is flashed to the board, you can connect to its serial port
using tockloader listen. Upon reset, the board should now greet you:
$ tockloader listen
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAC0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
Hello World!
tock$
Congratulations, you have successfully installed and run your first Tock application! You can manage apps installed on a board with Tockloader. For instance, use the following commands to install, list, and erase applications:
$ tockloader install # Installs an app
$ tockloader list # Lists installed apps
$ tockloader erase-apps # Erases all apps
Making Your First System Call
The goal of the sensor application is to sample this chip's internal temperature sensor.
However, an application in Tock runs as an unprivileged process, and as such it
does not have direct access to any chip peripherals. Instead, the application
needs to ask the Tock kernel to perform this operation. For this, libtock-c
provides some system call wrappers that our application can use. These are
defined in the libtock folder of the libtock-c repository. For this
particular application, we are mainly interested in talking to Tock's sensor
driver subsystem. For this, libtock-c/libtock-sync/sensors/temperature.h
provides convenient userspace wrapper functions, such as
libtocksync_temperature_read:
#include <libtock-sync/sensors/temperature.h>
// Read the temperature sensor synchronously.
//
// ## Arguments
//
// - `temperature`: Set to the temperature value in hundredths of degrees
// centigrade.
//
// ## Return Value
//
// A returncode indicating whether the temperature read was completed
// successfully.
returncode_t libtocksync_temperature_read(int* temperature);
For now, let's focus on using the API to make a system call to read the
temperature. For this, we can extend the provided 00_sensor_hello
application's main.c file with a call to that function. Your code should
invoke this function and pass it a reference into which the temperature value
will be written. You can then extend the printf call to print this number.
Note, the temperature sensor syscall returns a value of the form 2200 for a
temperature of 22C. You will need to format your temperature reading
appropriately.
With these changes, compile and re-install your application by running
make install again. Once that is done, you should see output similar to the
following:
$ tockloader listen
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAC0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
Hello World, the temperature is: 22.00
tock$
CHECKPOINT:
01_sensor_temperature
Congratulations! We now have a libtock-c application that is able to read the
nRF52840 internal temperature sensor. Now, we expand this to read the
temperature sensor continuously.
Given that temperatures change gradually, it is reasonable to read our
temperature sensor once per second. libtock-c provides a convient method to
delay for a specified duration in libtock-c/libtock-sync/services/alarm.h:
/** \brief Blocks for the given amount of time in milliseconds.
*
* This is a blocking version of `libtock_alarm_in_ms`. Instead of calling a user
* specified callback, it blocks the current call-stack.
*
* \param ms the number of milliseconds to delay for.
* \return An error code. Either RETURNCODE_SUCCESS or RETURNCODE_FAIL.
*/
int libtocksync_alarm_delay_ms(uint32_t ms);
EXERCISE Read the temperature sensor once per second and print the temperature value.
If you have implemented this correctly, you should see output similar to:
$ tockloader listen
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAF0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
Current temperature: 22.25
tock$ Current temperature: 22.25
Current temperature: 22.25
Current temperature: 22.25
To confirm that your sensor is working, try placing your finger on the nRF52840 SoC (this is located between the cluster of 4 buttons and the cluster of 4 LEDs, in the center of the white box on the nRF52840dk). You should see the temperature change as the temperature sensor we are using is the "on-die" temperature sensor.
CHECKPOINT:
02_sensor_final
This concludes the sensor module.
Now that we are able to read the temperature, we will continue on to network our mote using Tock's supported OpenThread stack.
Wireless Networking App
NOTE Please read the Thread Primer if you have not already done so.
Libopenthread
At this point the tutorial assumes there is a separate, single nRF52840DK board running nearby that is acting as a Thread router and also providing a network endpoint that performs certain logic (such as averaging temperature setponts).
In a hosted tutorial setting this will already be set up for you. If you are working through the tutorial on your own, you will need to follow the router setup instructions before continuing if you have not already.
We now begin implementing an OpenThread app using libopenthread. Because Tock
is able to run arbitrary code in userspace, we can make use of this existing
library and tie it into the Tock ecosystem. As such, this part of our
application works quite similar compared to other platforms.
For the purposes of this tutorial, we provide a hardcoded network key (commissioned joining would be a more secure authentication method). The major steps to join a Thread network include:
- Creating a dataset.
- Adding the network key,
panid, and channel to the dataset. - Committing the active dataset.
- Initializing the IP interface.
- Begin thread network attachment.
Each of these steps are accomplished using functions the OpenThread API exposes.
CHECKPOINT:
03_openthread
We provide a skeleton implementation in 03_openthread that is missing the
logic needed to attach to the thread network. Your task is to add the needed
OpenThread API calls to attach your device to the thread network.
As before, begin by making a copy of the starting checkpoint to work from:
$ cp -r 03_openthread my_openthread
$ cd my_openthread
The provided starter code includes a helper method:
void setNetworkConfiguration(otInstance* aInstance). This method will
initialize the network configuration dataset to the correct values (this
completes steps 1, 2, and 3 above).
EXERCISE Initialize the network dataset.
Now that we have the network dataset initialized, we now must initialize the IP interface to have an IPv6 address assigned to our Thread node. The OpenThread library possess an API exposed as many functions. Two useful API functions include:
otIp6SetEnabled(otInstance* aInstance, bool aEnabled)
otThreadSetEnabled(otInstance* aInstance, bool aEnabled)
EXERCISE Initialize the IP interface.
To confirm that we have successfully initialized the IP interface, add the following helper method after your IP initialization:
print_ip_addr(instance);
Our Thread node is now fully configured and ready to attempt joining a network.
EXERCISE Start the Thread Network
After completing these changes, build and flash the updated openthread app
($ make install).
Our skeleton registers a callback with OpenThread to notify upon state change.
Upon successfully implementing the above network attachment, flash the app,
launch tockloader listen and reset the board using:
tock$ reset
If you have successfully implemented the thread network attachment, you will see:
tock$ [THREAD] Device IPv6 Addresses: fe80:0:0:0:b4ef:e680:d8ef:475e
[State Change] - Detached.
[State Change] - Child.
Successfully attached to Thread network as a child.
If you are unable to join the network, this is a good time to ask for help at a hosted tutorial event, or feel free to jump ahead to the checkpoint below.
CHECKPOINT: 04_openthread_attach
To send and receive UDP packets, we must also correctly configure UDP.
We must complete the following steps to setup UDP in the OpenThread library:
- Initialize UDP interface.
- Register a function as a receive callback.
- Implement a function to transmit.
For your convience, we provide helper methods to accomplish each of the aformentioned steps.
- Initialize UDP interface →
initUdp - Register a function as a receive callback →
handleUdpRecvTemperature - Implement a function to transmit →
sendUdpTemperature
Internally, our provided initUDP function registers our receive callback
(handleUdpRecvTemperature).
Add the following functions to the communication application's main.c:
static otUdpSocket sUdpSocket;
void initUdp(otInstance* instance);
void handleUdpRecvTemperature(void* aContext, otMessage* aMessage,
const otMessageInfo* aMessageInfo);
void sendUdpTemperature(otInstance* aInstance, uint8_t temperature);
void handleUdpRecvTemperature(void* aContext, otMessage* aMessage,
const otMessageInfo* aMessageInfo) {
OT_UNUSED_VARIABLE(aContext);
OT_UNUSED_VARIABLE(aMessageInfo);
char buf[2];
const otIp6Address sender_addr = aMessageInfo->mPeerAddr;
otIp6AddressToString(&sender_addr, buf, sizeof(buf));
otMessageRead(aMessage, otMessageGetOffset(aMessage), buf, sizeof(buf) - 1);
printf("Received UDP Packet: %d\r\n", buf[0]);
}
void initUdp(otInstance* aInstance) {
otSockAddr listenSockAddr;
memset(&sUdpSocket, 0, sizeof(sUdpSocket));
memset(&listenSockAddr, 0, sizeof(listenSockAddr));
listenSockAddr.mPort = 1212;
otUdpOpen(aInstance, &sUdpSocket, handleUdpRecvTemperature, aInstance);
otUdpBind(aInstance, &sUdpSocket, &listenSockAddr, OT_NETIF_THREAD);
}
void sendUdpTemperature(otInstance* aInstance, uint8_t temperature) {
otError error = OT_ERROR_NONE;
otMessage* message;
otMessageInfo messageInfo;
otIp6Address destinationAddr;
memset(&messageInfo, 0, sizeof(messageInfo));
otIp6AddressFromString("ff02::02", &destinationAddr);
messageInfo.mPeerAddr = destinationAddr;
messageInfo.mPeerPort = 1212;
message = otUdpNewMessage(aInstance, NULL);
if (message == NULL) {
printf("Error creating udp message\n");
return;
}
error = otMessageAppend(message, &temperature, 1);
if (error != OT_ERROR_NONE && message != NULL) {
printf("Error appending to udp message\n");
otMessageFree(message);
return;
}
error = otUdpSend(aInstance, &sUdpSocket, message, &messageInfo);
if (error != OT_ERROR_NONE && message != NULL) {
printf("Error sending udp packet\n");
otMessageFree(message);
}
}
EXERCISE Add the
initUDPfunction to the Thread initialization that occurs withinmain().
We now have an initialized UDP interface. Now let's try to send a UDP packet to our router over the Thread interface. Importantly, we must only attempt to send a UDP packet after we have succesfully joined the Thread network.
EXERCISE Modify the
stateChangeCallbacksuch that when our device attaches to the network and becomes a child, we send a UDP packet using:sendUdpTemperature(instance, 22)
The registered UDP receive callback is implemented to print received packets to the console. Our router is implemented to receive UDP packets and reply with a multicast of the global average temperature setpoint.
After completing these changes, build and flash the openthread application. In the tockloader console, you should see (upon reset):
tock$ [THREAD] Device IPv6 Addresses: fe80:0:0:0:b4ef:e680:d8ef:475e
[State Change] - Detached.
[State Change] - Child.
Successfully attached to Thread network as a child.
Received UDP Packet: {GLOBAL_SET_POINT_VALUE}
CHECKPOINT:
05_openthread_final
Congratulations! We now have a networked mote that is attached to our router and capable of sending and receiving UDP packets.
Next up, we will work to obtain user input (buttons) and implement the display.
Building the User Interface
In the previous stages we built a sensor application that is able to query the Tock kernel for the current temperature and a communication application that is able to send and receive UDP packets. We now will build a user interface so that you are able to request your desired temperature and avoid overheating or freezing!
Before starting to develop this app, please remove any existing apps from the board (including the sensor application and communication applications) using the following tockloader command:
$ tockloader erase-apps
We will first build a simple button interface to introduce Tock's concept of callbacks. We will then expand this to utilize an OLED screen to display the temperature readings and desired temperature setpoint.
CHECKPOINT:
06_screen
Let's begin this app like the others, with a copy of the starting checkpoint:
$ cp -r 06_screen my_screen
$ cd my_screen
Now that you're familiar with tock and libtock-c, our starter here is
basically an empty application! Remember, if you get stuck at any point, we
include checkpoints along the way.
Here we go!
Adding the button interface
tock and libtock-c embrace an asynchronous design. Thus far, we have been
using the command syscalls the kernel exposes to userland. The tock kernel
also allows user applications to register callbacks so that applications can be
notified upon certain events. In practice, Tock userland apps often take the
form:
[Register callback for event]
|
|
[Yield]
|
|
...
|
|
[Kernel invokes callback]
|
|
[App continues execution]
Sometimes blocking an app with a synchronous function is useful. To accommodate
this, libtock-c libraries are split into libtock (which is async) and
libtock-sync. If you recall, we used a libtock-sync function to implement
the delay when reading the temperature sensor earlier. Internally, the
libtock-sync methods call the standard libtock async methods, but utilize
the following pattern to provide the application with synchronous blocking
behavior:
void yield_for(bool* cond) {
while (!*cond) { // async callback will set `cond`
yield();
}
Another important consideration with callbacks is that the tock kernel will
only execute a pending callback once the application has yielded. This means
that the application developer should yield when waiting to receive a callback
from the kernel.
Now that we understand a bit more what's happening under the hood, let's add our first callback!
libtock provides a wrapper to register a callback with the kernel that
corresponds to button presses:
// Function signature for button press callbacks.
//
// - `arg1` (`returncode_t`): Returncode indicating status of button press.
// - `arg2` (`int`): Button index.
// - `arg3` (`bool`): True if pressed, false otherwise.
typedef void (*libtock_button_callback)(returncode_t, int, bool);
// Setup a callback when a button is pressed.
//
// ## Arguments
//
// - `button_num`: The index of the button.
// - `cb`: The function to be called when the button is pressed. Will be called
// both when the button is pressed and when released.
returncode_t libtock_button_notify_on_press(int button_num, libtock_button_callback cb);
With this in mind, let's add a callback function to our screen app that prints to the console.
Add the following to main.c:
#include <libtock/interface/button.h>
static void button_callback(returncode_t ret,
int btn_num,
bool pressed) {
if (ret != RETURNCODE_SUCCESS) return;
if (pressed) {
printf("Button %i pressed!\r\n", btn_num);
}
}
EXERCISE Register our above button_callback with the libtock_button_notify_on_press(...) method.
Hints (click to open)
- We must register callbacks for each of the four buttons.
- Did you remember to yield? The kernel will only execute an app's registered callback if the application has yielded.
- Does your main() return? We want this application to "run forever". Still confused? An infinite loop with `yield()` inside the body should do the trick :)
Let's build and flash this screen application to our board. Try pressing any of the 4 buttons on the nRF52840dk (not the reset button). If you have correctly implemented the callback, you should see:
tock$ reset
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAF0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
tock$ Button 0 pressed!
CHECKPOINT
07_screen_button
Adding the u8g2 Library
Tock is able to run arbitrary code in its userspace applications, including
existing C libraries. For this stage in particular, we are interested in
displaying information on a screen. Without a library to render text or symbols,
this can be quite cumbersome. Instead, we will use the u8g2 library with
libtock-c bindings.
To add this library to our application we add the following two lines to our
application's Makefile, before the AppMakefile.mk include:
STACK_SIZE := 4096
EXTERN_LIBS += $(TOCK_USERLAND_BASE_DIR)/u8g2
We increase the size of the stack that is pre-allocated for the application, as
libtock-c by default allocates a stack of 2 kB which is insufficient for
u8g2. We then specify that our application depends on the u8g2 library, by
adding the libtock-c/u8g2 directory to EXTERN_LIBS. This directory contains
a wrapper that allows the u8g2 library to communicate with Tock's screen
driver system calls and ensures that the library can be used from within our
application.
Once this is done, we can add some initialization code to our screen application:
#include <u8g2.h>
#include <u8g2-tock.h>
// Global reference to the u8g2 context.
u8g2_t u8g2;
// Helper method to update and format u8g2 screen.
static void update_screen(void);
int main(void) {
// Required initialization code:
u8g2_tock_init(&u8g2);
u8g2_SetFont(&u8g2, u8g2_font_profont12_tr);
u8g2_SetFontPosTop(&u8g2);
// Clear the screen:
u8g2_ClearBuffer(&u8g2);
u8g2_SendBuffer(&u8g2);
[...]
}
When we now build and install this app, it should clear the screen. With this app installed, you may see repeated flickering when installing applications or resetting your board.
EXERCISE: Extend the above app to print a simple message on the screen.
You can use the
u8g2_SetDrawColor(&u8g2, 1);method to draw in either the0or1color (i.e., foreground or background).
u8g2_DrawStr(&u8g2, $XCOORD, $YCOORD, $YOUR_STRING);can be used to print a string to the display.Make sure you update the display contents with a final call to
u8g2_SendBuffer(&u8g2);.
Well done! Now we can begin adding the desired text for our HVAC controller.
We want our screen to display 3 lines of text:
Set Point: {VALUE}
Global Set Point: {VALUE}
Measured Temp: {VALUE}
The set point is our desired temperature for the HVAC system. The global set point is the average of all motes' requested desired temperature. Finally, the measured temperature is the measure from the device's local temperature sensor.
For use with the later stages of our application, it will be helpful to have a
function that performs the screen update. Add the following global variables and
a function of the form to our screen main.c:
uint8_t global_temperature_setpoint = 0;
uint8_t local_temperature_setpoint = 22;
uint8_t measured_temperature = 0;
static void update_screen(void) {
char temperature_set_point_str[35];
char temperature_global_set_point_str[35];
char temperature_current_measure_str[35];
// TODO: Format output buffer; display text to screen.
}
EXERCISE Extend
update_screento display our desired 3 lines of text and the value of the respective global variable.HINT
sprintf(...)is useful for formatting our char array.
As always, build and flash the screen application. At this point, you should see three strings on your u8g2 screen. If you are struggling to display the three strings, this is a good time to ask for help or to utilize the checkpoint!
CHECKPOINT
08_screen_u8g2
Updating the Desired Local Temperature
We are now able to display text to our screen and to receive user input through the button presses. With these pieces, we can begin building our controller user interface! This interface will allow the user to input their desired temperature setpoint. The nRF52840dk has 4 user input buttons. These buttons are labeled 0-3 moving clockwise from the upper left button. We map the buttons as follows:
- Button 0 => increase local setpoint (+1)
- Button 1 => decrease local setpoint (-1)
- Button 2 => reset local setpoint to 22 C
EXERCISE: Update the
button_callbackto update thelocal_temperature_setpointfor button presses—using the above button mapping. When implementing this setpoint logic, ensure that the maximum setpoint is 35 C and that the minimum setpoint is 0 C.
If we build and flash this application at this point, we will notice that the screen remains at the default values. This is because we need to call the update function when a button is pressed. How can we do this?
A simple (but naïve) approach is to change main() to update the screen within
the main loop:
for(;;) {
yield();
update_screen();
}
This will yield until the kernel fires a callback, at which point the u8g2 screen update function will be invoked. Although this works for our current example, take a second to think why this may cause issues as we expand our application.
You guessed it! Because this function will only yield until a callback is fired,
any callback will cause our screen to be updated. This is somewhat
inefficient. We instead desire the application to yield until a button press
occurs. Do you remember something we discussed earlier that might fill this
need? (hint, this was mentioned in the libtock-sync discussion).
Exactly! yield_for:
// n.b., this function is provided by libtock/tock.h
// You do not need to copy this function, just use the libtock-provided version.
// We repeat its definition here for conceptual understanding only.
void yield_for(bool* cond) {
while (!*cond) {
yield();
}
This libtock-sync function will yield until our desired condition is met.
Let's add this to our screen application. To do this, we will add a global bool
variable
bool callback_event = false;
EXERCISE
- Update the button callback to set the
callback_eventtrue- Update our infinite loop to use
yield_for(&callback_event).
As always, build and flash your screen application. You should now see that your displayed local setpoint temperature updates with button presses!
CHECKPOINT:
09_screen_final
This concludes the screen app module.
Continue on to put everything together with inter-process communication!
Inter Process Communication
We now have three working applications! To make sure we are on the same page, if you have any uncertainty of your implementation(s) thus far, update your tutorial implementation with the final checkpoint implementation. Then install all three applications on your board:
$ cd libtock-c/examples/tutorials/thread_tutorials/temperature_sensor/
# As-needed
$ cp -r 02_sensor_final my_sensor
$ cp -r 05_openthread_final my_openthread
$ cp -r 09_screen_final my_screen
# Then install each app!
$ make install -C my_sensor
$ make install -C my_openthread
$ make install -C my_screen
After installing these three applications, run:
$ tockloader listen
Within the tock console, you should see output of the following form:
tock$ [THREAD] Device IPv6 Addresses: fe80:0:0:0:b4ef:e680:d8ef:475e
[State Change] - Detached.
Current Temperature: 24
Current Temperature: 24
[State Change] - Child.
Successfully attached to Thread network as a child.
Received UDP Packet: 22
Current Temperature: 24
Current Temperature: 24
Current Temperature: 24
Current Temperature: 24
Current Temperature: 24
Current Temperature: 24
Current Temperature: 24
Current Temperature: 24
Current Temperature: 24
Current Temperature: 24
The exact output you observe will likely be interspersed. Remember Tock is multitenant and scheduling each of our applications (resulting in our output to this console being mixed across applications).
In addition to this output, you should also have the global/local/measured temperature text on your screen as well as the ability to alter the local temperature setpoint using the buttons.
Let's review how our HVAC control system will work:
- The communication application will send our desired local temperature setpoint and will receive the global setpoint from the central router.
- The sensor application will measure the local device temperature.
- The screen application will obtain user input to select the desired temperature setpoint and will display the global setpoint, local setpoint, and local measured temperature.
We see that these applications are interdependent on each other. How can we share data between applications?
A naïve solution would be to allocate shared global state that each application can access. Although this is inadvisable for security and robustness, many embedded OSes would allow for this shared global state.
Tock, however, strictly isolates applications—meaning we are unable to have shared global state across applications. This is beneficial as a buggy or malicious application is unable to harm other applications or the kernel.
To allow applications to share data, the Tock kernel provides interprocess communication (IPC). We will update our applications to use IPC next.
IPC in Tock is separated into services and clients.
For our HVAC control system:
- The screen application will serve as our client.
- The sensor application and communication application will act as services.
Screen Application IPC
This part will edit
my_screen, which should be up-to-date with equivalent operation of09_screen_final.
Creating an IPC Client: Initialize and Discover Services
Let's go ahead and setup our client code first! We first must initialize our IPC client. This will consist of:
- Discovering the services (these will error for now since they are not implemented).
- Registering callbacks that the kernel will invoke when our service wishes to notify client(s).
- Sharing a buffer to the IPC interface.
Tock's IPC interface can be a bit challenging. For this early tutorial, we have
simply implemented these changes for you in the checkpoint 10_screen_ipc.
Simply $ cp 10_screen_ipc/main.c my_screen/main.c.
If you are interested in instead applying the changes to your screen implementation, work through the diff to update your application.
$ diff -w 09_screen_final/main.c 10_screen_ipc/main.c
In either case, be sure to re-build and flash the updated my_screen to your
board.
Now that our IPC client is setup, let's add our IPC services!
Temperature Sensor IPC
This part will edit
my_sensor, which should be up-to-date with equivalent operation of02_sensor_final.
Let's setup the sensor app as an IPC service! Change into the my_sensor
application.
First, we will create the callback that our client invokes when they request
this service. Add the following callback to our main.c:
static void sensor_ipc_callback(int pid, int len, int buf,
__attribute__((unused)) void* ud) {
// A client has requested us to provide them the current temperature value.
// We must make sure that it provides us with a buffer sufficiently large to
// store a single integer:
if (len < ((int) sizeof(current_temperature))) {
// We do not inform the caller and simply return. We do print a log message:
puts("[thread-sensor] ERROR: sensor IPC invoked with too small buffer.\r\n");
}
// The buffer is large enough, copy the current temperature into it:
memcpy((void*) buf, ¤t_temperature, sizeof(current_temperature));
// Let the client know:
ipc_notify_client(pid);
}
Now, let's register this app as an IPC service with the kernel. Add the
following to the sensor app main():
// Register this application as an IPC service under its name:
ipc_register_service_callback("org.tockos.thread-tutorial.sensor",
sensor_ipc_callback,
NULL);
Careful! To ensure an IPC client cannot make a request of the sensor service before this app has read the temperature, be sure your app reads the temperature sensor at least once before registering the service with the kernel.
Additionally, let's go ahead and remove the printf(). Now that we are using
the screen, we no longer need this information to be displayed on the console.
CHECKPOINT:
11_sensor_ipc
Congrats! You just successfully created a temperature sensor service! Let's go ahead and do this for OpenThread now.
OpenThread IPC
This part will edit
my_openthread, which should be up-to-date with equivalent operation of05_openthread_final.
We follow a similar structure to the temperature sensor service here. Let's
first create our callback that our client will invoke to use this service. Add
the following global variables and callback to the openthread app's main.c:
uint8_t local_temperature_setpoint = 22;
uint8_t global_temperature_setpoint = 255;
uint8_t prior_global_temperature_setpoint = 255;
bool network_up = false;
bool send_local_temp = false;
static void openthread_ipc_callback(int pid, int len, int buf,
__attribute__((unused)) void* ud) {
// A client has requested us to provide them the current temperature value.
// We must make sure that it provides us with a buffer sufficiently large to
// store a single integer:
if (len < ((int) sizeof(prior_global_temperature_setpoint))) {
// We do not inform the caller and simply return. We do print a log message:
puts("[thread] ERROR: sensor IPC invoked with too small buffer.\r\n");
}
// copy value in buffer to local_temperature_setpoint
uint8_t passed_local_setpoint = *((uint8_t*) buf);
if (passed_local_setpoint != local_temperature_setpoint) {
// The local setpoint has changed, update it.
local_temperature_setpoint = passed_local_setpoint;
send_local_temp = true;
}
if (network_up) {
if (prior_global_temperature_setpoint != global_temperature_setpoint) {
prior_global_temperature_setpoint = global_temperature_setpoint;
// The buffer is large enough, copy the current temperature into it.
memcpy((void*) buf, &global_temperature_setpoint, sizeof(global_temperature_setpoint));
// Notify the client that the temperature has changed.
ipc_notify_client(pid);
}
}
}
Now that we have this callback, let's register our service with the kernel. Add the following to the openthread app's main function:
// Register this application as an IPC service under its name:
ipc_register_service_callback("org.tockos.thread-tutorial.openthread",
openthread_ipc_callback,
NULL);
The logic in the callback determines if the local temperature setpoint has
changed, and if so, sends an update over the Thread network (if the Thread
network is enabled). We send this update using UDP. If you look closely, you
will notice that our callback does not directly call the
sendUdpTemperature(...) we used in the openthread module. Why is this?
Callbacks and Reentrancy
If a callback function, say the ipc_callback, executes code that inserts a
yield point, we may experience reentrancy. This means that during the execution
of the ipc_callback, other callbacks—including ipc_callback
itself—may be scheduled again.
Consider the following example:
void ipc_callback() {
// The call to yield allows other callbacks to be scheduled,
// including `ipc_callback` itself!
yield();
}
void main() {
send_ipc_request();
// This call allows the initial `ipc_callback` to be scheduled:
yield();
}
While Tock applications are single-threaded and this type of reentrancy is less
dangerous than, e.g., UNIX signal handlers, it can still cause issues. For
instance, when a function called from within a callback performs a yield
internally, it can unexpectedly be run within the execution of the function.
This can in turn break the function's semantics. Thus, it is good practice to
restrict callback handler code to only non-blocking operations.
For this reason, the openthread IPC callback only sets a flag specifying that we
should send an update packet (as sendUdpTemperature(..) internally will
yield).
We now must add a check to our main loop to see if a client of our openthread service requires us to send a packet updating the local temperature setpoint.
EXERCISE Add a check to see if the
send_local_tempflag is set. If this condition is met, send the value oflocal_temperature_setpointusing thesendUdpTemperature(...)method.
EXERCISE Alter the
handleUdpRecvTemperature(...)method to no longer print the received global temperature packet, but instead update theglobal_temperature_setpointvariable with this value.
Wonderful, we are almost finished. The final modification we will need to make
is to the state change callback. The way we have currently designed our system,
we must send the local temperature setpoint and update the network_up flag
when we attach to a thread network. Add the following to the
stateChangeCallback(...) for the case of becoming a child:
network_up = true;
sendUdpTemperature(instance, local_temperature_setpoint);
CHECKPOINT:
12_openthread_ipc
And congratulations! You have now have a complete, working, networked temperature controller!
In the final stage, next, we will explore how isolated processes enable robust operation.
Tock Robustness
Setting Tock apart from many other embedded operating systems is its security-first design model: applications are generally mutually distrustful. In practice, this means that any misbehavior in one application should not affect other applications. This includes both faults (such as invalid pointer dereferences, etc.) and excessive resource utilization.
Take, for instance, a standard network application that implements all logic within one application unit (i.e., links OpenThread directly to the platform implementation). We consider two illustrative scenarios below of what may go wrong and how Tock guards against such outcomes.
Scenario 1 - Faulting Application
OpenThread is a large code base and interacts with a number of buffers. Furthermore, our OpenThread app adds the complexity of sharing buffers across IPC. Given the challenges in writing C code, it is likely that some aspect of the application will fault at some point in the future.
In a traditional embedded platform, a fault in the OpenThread app logic or the third-party OpenThread code base would in turn result in the platform itself faulting. Tock guards against this by isolating different applications and the kernel using memory protection. Subsequently, a faulting app can be handled by the kernel and the broader system is left unharmed.
In practice, developers have the option to specify how the kernel should handle such faults through a fault policy. Such policies can be user-defined, and Tock includes some by default, such as:
StopFaultPolicy: stops the process upon a fault,PanicFaultPolicy: causes the entire platform to panic upon any process fault (useful for debugging), orRestartWithDebugFaultPolicy: restarts a process after it has faulted, and prints a message to the console informing users of this restart.
In this tutorial, our board-definition comes
pre-configured with the PanicFaultPolicy.
Scenario 2 - Buggy Behavior
Alternatively, a bug in the controller app results in it entering some form of infinite loop (be it deadlock or busy waiting). In a non-preemptive platform, the system will be disabled due to this bug. However, because Tock preempts applications, such a buggy application will no longer function, but the broader system will be unharmed.
Tock Kernel
Up to this juncture, we have exclusively worked within userspace. To demonstrate Tock's ability to recover from faulting applications, we will first modify our application and deliberately introduce a fault. This will cause the kernel to panic and to print useful debug information. We then modify the kernel's fault policy to instead restart the application.
We can see the fault policy that is in use with the kernel by looking at the
tock/boards/tutorials/nrf52840dk-thread-tutorial/src/main.rs file. It defines
a FAULT_RESPONSE variable with an instance of the fault policy that we want to
use:
#![allow(unused)] fn main() { // How should the kernel respond when a process faults. const FAULT_RESPONSE: capsules_system::process_policies::PanicFaultPolicy = capsules_system::process_policies::PanicFaultPolicy {}; }
We can also artificially fault a process through Tock's process console. For instance, when faulting our controller app, this can look like:
tock$ list
PID ShortID Name Quanta Syscalls Restarts Grants State
0 Unique thread_controller 1 130 0 5/18 Yielded
1 Unique org.tockos.thread-tutorial.sensor 0 91 0 3/18 Yielded
tock$ fault thread_controller
---| No debug queue found. You can set it with the DebugQueue component.
panicked at kernel/src/process_standard.rs:362:17:
Process thread_controller had a fault
Kernel version release-2.1-2908-g9d9b87d83
---| Cortex-M Fault Status |---
No Cortex-M faults detected.
---| App Status |---
𝐀𝐩𝐩: thread_controller - [Faulted]
Events Queued: 0 Syscall Count: 262 Dropped Upcall Count: 0
Restart Count: 0
Last Syscall: Yield { which: 1, address: 0x0 }
Completion Code: None
╔═══════════╤══════════════════════════════════════════╗
║ Address │ Region Name Used | Allocated (bytes) ║
╚0x2000E000═╪══════════════════════════════════════════╝
│ Grant Ptrs 144
│ Upcalls 320
[...]
Injecting a Fault into the Application
For the purposes of this tutorial, we will dedicate one button (Button 4) to inject an artificial fault into the control application. We can do this, for instance, by simply dereferencing the NULL pointer: even on chips where this is a valid memory location, Tock's memory protection will never expose this address to an application.
EXERCISE: Implement a button callback handler that dereferences the null pointer. You can do so with, for example:
*((char*) NULL) = 42;Do not forget to register a callback handler for Button 4, too!
Now, whenever you press Button 4, your board should print output similar to the above. Because the kernel panic's, it will loop forever and blink LED1 in a recognizable pattern. You will need to reset the board to restart the Tock kernel and all applications.
Switching the Fault Handler
With this application fault implemented, we can now switch the kernel's fault policy to restart the offending application, instead of panic'ing the whole platform:
// How should the kernel respond when a process faults.
-const FAULT_RESPONSE: capsules_system::process_policies::PanicFaultPolicy =
- capsules_system::process_policies::PanicFaultPolicy {};
+const FAULT_RESPONSE: capsules_system::process_policies::RestartWithDebugFaultPolicy =
+ capsules_system::process_policies::RestartWithDebugFaultPolicy {};
After making this change, you will need to recompile the kernel, like so:
$ cd tock/boards/tutorials/nrf52840dk-thread-tutorial
$ make
[...]
Compiling nrf52_components v0.1.0 (/home/leons/proj/tock/kernel/boards/nordic/nrf52_components)
Compiling nrf52840dk v0.1.0 (/home/leons/proj/tock/kernel/boards/nordic/nrf52840dk)
Finished `release` profile [optimized + debuginfo] target(s) in 11.09s
text data bss dec hex filename
233474 36 41448 274958 4320e tock/target/thumbv7em-none-eabi/release/nrf52840dk-thread-tutorial
cb0df7abb1...d47b383aaf tock/target/thumbv7em-none-eabi/release/nrf52840dk-thread-tutorial.bin
Finally, flash the new kernel using make install:
$ make install
tockloader flash --address 0x00000 --board nrf52dk --jlink tock/kernel/target/thumbv7em-none-eabi/release/nrf52840dk-thread-tutorial.bin
[INFO ] Using settings from KNOWN_BOARDS["nrf52dk"]
[STATUS ] Flashing binary to board...
[INFO ] Finished in 9.901 seconds
Now, when you re-connect to the board, you should see that the application is automatically being restarted every time it encounters a fault:
$ tockloader listen
tock$
Process thread_controller faulted and will be restarted.
[controller] Discovered sensor service: 1
Process thread_controller faulted and will be restarted.
[controller] Discovered sensor service: 1
Process thread_controller faulted and will be restarted.
[controller] Discovered sensor service: 1
Conclusion
This concludes our tutorial on using Tock to build a Thread-connected HVAC control system. We hope you enjoyed it!
We covered the following topics:
- how to build the Tock kernel, applications, and use Tockloader to install both onto a development board,
- placing system calls to interact with hardware peripherals, such as the temperature sensor, buttons, a screen, etc.,
- using existing C-based libraries in the
libtock-cuserspace library, - programming asynchronously and interacting between applications with IPC,
- and communicating between boards using the OpenThread library running within a Tock process.
Tock is an operating system applicable to a broad set of application domains, such as low-power and security-critical systems. We provide a broad set of guides and documentation:
- This book: https://book.tockos.org
- Tock code documentation: https://docs.tockos.org
- Reference documentation: https://github.com/tock/tock/tree/master/doc
We also provide some community resources, which you can find here: https://tockos.org/community/
We always appreciate feedback on our tutorials... What went well? What did you like? What was not so smooth? What was less interesting? How can we make things better?... Please do not hesitate to reach out, and if you have found any smaller typographical or technical errors, pull requests are welcome and appreciated!
Wireless Networking and Encrypted Sensor Data
Wireless networking exposes IoT devices to an increased attack surface. To secure devices and the data that is sent over wireless networks, wireless protocols use a range of security and encryption measures. Although data can be secured using these wireless networking protocols, this security often only protects our data from devices outside our network. In the context of an IoT network that may contain malicious devices, we may desire to add an additional layer of security to send sensitive data over our shared network that contains potentially malicious devices. How can we do this?
One technique is to use an additional layer of encryption. Perhaps our company, Super Secure Systems Corp makes a sensor that we desire to take measurements, encrypt the data, and then send this to other devices in our network. Our Super Secure Device is an IoT device that gains network connectivity using a Thread network that also hosts devices from other IoT companies---importantly our competitor, Lazy Security LLC. Although Thread networking, a popular IoT protocol, possesses security measures to encrypt network traffic, all devices within the network are able to decrypt Thread packets. For these reasons, we need to encrypt our Super Secure Device sensor data to be sure that the spies from our competitor, Lazy Security LLC, who ity LLC) and also to ensure that Lazy Security LLC's spies are not able to snoop on the data we are sending.
To encrypt/decrypt our data, notice that we require all our devices to possess the Super Secure Systems encryption key. How can we securely ship our devices with the needed key?
A hardware root of trust provides the ability to securely store and ship a device with keys (more on this in a bit!). Tock's design allows for easily creating secure systems that utilize a root of trust (for more details on how Tock can be used as a root of trust see the root of trust tutorial). Furthermore, Tock also possesses "out of the box" support for joining a Thread network.
Goal
In this module, we will demonstrate how Tock provides the building blocks to create a device capable of securely storing keys and encrypting/decrypting data to determine the authenticity of received data.
We will first introduce Thread Networking, a popular IoT wireless networking protocol and demonstrate Tock's support for OpenThread. Using our now networked device, we will then leverage Tock's security guarantees and ability to provide a root of trust that can securely store our encryption key and decrypt .
Hardware Notes
Any hardware that supports Tock should work, although this module will build on the nrf52840dk board.
nRF52840dk Hardware Setup

There are a couple of configurations on the nRF52840DK board that you should double-check:
- The "Power" switch in the corner near the USB should be set to "On".
- The "nRF power source" switch in the middle of the board (under the screen) should be set to "VDD".
- The "nRF ONLY | DEFAULT" switch on the side near the LEDs should be set to "DEFAULT".
Organization and Getting Oriented to Tock
This module will refer to some Tock components. This section briefly describes the general structure of Tock that you will need to be somewhat familiar with to follow the module.
Using Tock consists of two main building blocks:
- The Tock kernel, which runs as the operating system on the board. This is compiled from the Tock repository.
- Userspace applications, which run as processes and are compiled and loaded separately from the kernel.
The Tock kernel is compiled specifically for a particular hardware device,
termed a "board". The location of the top-level file for the kernel on a
specific board is in the Tock repository, under /tock/boards/<board name>. Any
time you need to compile the kernel or edit the board file, you will go to that
folder. You also install the kernel on the hardware board from that directory.
Userspace applications are stored in a separate repository, either libtock-c or libtock-rs (for C and Rust applications, respectively). Those applications are compiled within those repositories.
Main Tutorial
This module is broken into 2 stages:
-
Joining a Thread network using Tock. Thread Networking.
-
Using a kernel module to securely decrypt our sensor data. Encrypted Data.
As a note, the relevant source files can be found in the respective locations:
- Tock kernel:
tock/boards/tutorials/nrf52840dk-thread-tutorial - libtock-c checkpoints:
libtock-c/examples/tutorials/thread_tutorials/encrypted_sensor_data
Let's get started! Click here to continue and start learning about Thread networking.
Wireless Networking App
NOTE Please read the Thread Primer if you have not already done so.
Libopenthread
At this point the tutorial assumes there is a separate, single nRF52840DK board running nearby that is acting as a Thread router and also providing a network endpoint that performs certain logic (such as averaging temperature setponts).
In a hosted tutorial setting this will already be set up for you. If you are working through the tutorial on your own, you will need to follow the router setup instructions before continuing if you have not already.
We now begin implementing an OpenThread app using libopenthread. Because Tock
is able to run arbitrary code in userspace, we can make use of this existing
library and tie it into the Tock ecosystem. As such, this part of our
application works quite similar compared to other platforms.
For the purposes of this tutorial, we provide a hardcoded network key (commissioned joining would be a more secure authentication method). The major steps to join a Thread network include:
- Creating a dataset.
- Adding the network key,
panid, and channel to the dataset. - Committing the active dataset.
- Initializing the IP interface.
- Begin thread network attachment.
Each of these steps are accomplished using functions the OpenThread API exposes.
CHECKPOINT:
00_thread_network
We provide a skeleton implementation in 00_thread_network that is missing the
logic needed to attach to the thread network. Your task is to add the needed
OpenThread API calls to attach your device to the thread network.
Let's begin by making a copy of the starting checkpoint to work from:
$ cp -r 00_thread_network my_openthread
$ cd my_openthread
The provided starter code includes a helper method:
void setNetworkConfiguration(otInstance* aInstance). This method will
initialize the network configuration dataset to the correct values (this
completes steps 1, 2, and 3 above).
EXERCISE Initialize the network dataset.
Now that we have the network dataset initialized, we now must initialize the IP interface to have an IPv6 address assigned to our Thread node. The OpenThread library possess an API exposed as many functions. Two useful API functions include:
otIp6SetEnabled(otInstance* aInstance, bool aEnabled)
otThreadSetEnabled(otInstance* aInstance, bool aEnabled)
EXERCISE Initialize the IP interface.
To confirm that we have successfully initialized the IP interface, add the following helper method after your IP initialization:
print_ip_addr(instance);
Our Thread node is now fully configured and ready to attempt joining a network.
EXERCISE Start the Thread Network
After completing these changes, build and flash the updated openthread app
($ make install).
Our skeleton registers a callback with OpenThread to notify upon state change.
Upon successfully implementing the above network attachment, flash the app,
launch tockloader listen and reset the board using:
tock$ reset
If you have successfully implemented the thread network attachment, you will see:
tock$ [THREAD] Device IPv6 Addresses: fe80:0:0:0:b4ef:e680:d8ef:475e
[State Change] - Detached.
[State Change] - Child.
Successfully attached to Thread network as a child.
If you are unable to join the network, this is a good time to ask for help at a hosted tutorial event, or feel free to jump ahead to the checkpoint below.
CHECKPOINT: 01_openthread_attach
To send and receive UDP packets, we must also correctly configure UDP. For this tutorial we will only focus on receiving UDP packets.
We must complete the following steps to setup receiving using UDP in the OpenThread library:
- Initialize UDP interface.
- Register a function as a receive callback.
For your convience, we provide helper methods to accomplish each of the aformentioned steps.
- Initialize UDP interface →
initUdp - Register a function as a receive callback →
handleUdpRecv
Internally, our provided initUDP function registers our receive callback
(handleUdpRecv).
Add the following functions to the communication application's main.c:
#include<ctype.h>
static otUdpSocket sUdpSocket;
void initUdp(otInstance* instance);
void handleUdpRecv(void* aContext, otMessage* aMessage,
const otMessageInfo* aMessageInfo);
void handleUdpRecv(void* aContext, otMessage* aMessage,
const otMessageInfo* aMessageInfo) {
OT_UNUSED_VARIABLE(aContext);
OT_UNUSED_VARIABLE(aMessageInfo);
char buf[150];
int length;
printf("Received UDP packet [%d bytes] from ", otMessageGetLength(aMessage) - otMessageGetOffset(aMessage));
const otIp6Address sender_addr = aMessageInfo->mPeerAddr;
otIp6AddressToString(&sender_addr, buf, sizeof(buf));
printf(" %s ", buf);
length = otMessageRead(aMessage, otMessageGetOffset(aMessage), buf, sizeof(buf) - 1);
buf[length] = '\n';
for (int i = 0; i < length; i++) {
if(isprint((unsigned char)buf[i])) {
printf("%c", buf[i]);
} else {
// In case the received char is not
// printable, print '-'
printf("-");
}
}
printf("\n");
}
void initUdp(otInstance* aInstance) {
otSockAddr listenSockAddr;
memset(&sUdpSocket, 0, sizeof(sUdpSocket));
memset(&listenSockAddr, 0, sizeof(listenSockAddr));
listenSockAddr.mPort = 1212;
otUdpOpen(aInstance, &sUdpSocket, handleUdpRecv, aInstance);
otUdpBind(aInstance, &sUdpSocket, &listenSockAddr, OT_NETIF_THREAD);
}
EXERCISE Add the
initUDPfunction to the Thread initialization that occurs withinmain().
We now have an initialized UDP interface. The registered UDP receive callback is implemented to print received packets to the console.
After completing these changes, build and flash the openthread application. In the tockloader console, you should see (upon reset):
tock$ [THREAD] Device IPv6 Addresses: fe80:0:0:0:b4ef:e680:d8ef:475e
[State Change] - Detached.
[State Change] - Child.
Successfully attached to Thread network as a child.
Received UDP Packet: {RECEIVED DATA}
CHECKPOINT:
02_openthread_final
Congratulations! We now have a networked mote that is attached to our router and capable of receiving UDP packets.
Encrypted Sensor Data
We now will extend our networked device to decrypt the sensor readings we receive from other Super Secure Systems devices that encrypt the data using our company's encryption key. Notice that we currently receive both encrypted and unencrypted data.
At a high level, both the sender and receiver of our sensor data possess our unique key. For simlicity in this tutorial, we have decided to use AES128CTR encryption and decide to format the payloads of the UDP packets we send as follows:
|--- HEADER ---|--- IV ---|--- SIGNED DATA --- |
NOTE AES128CTR is not an authenticated encryption scheme and is probably not appropriate to use in a real world device. We are using this here for ease of use and demonstration purposes.
Importantly, OpenThread already encrypts the data sent within the Thread network. We add this additional layer of encryption to prevent non Super Secure Systems devices from snooping on the sensor data we collect.
Decrypting Received Packets
Tock provides apps access to cryptographic operations (e.g. an app can request the kernel decrypt a given buffer). Naively, we can utilize said kernel functionality to decrypt a packet and store the key in plaintext in the app.
Storing such secrets in plaintext, however, is not particularly secure. For instance, many microcontrollers offer debug ports which can be used to gain read and write access to flash. Even if these ports can be locked down, such protection mechanisms have been broken in the past. Apart from that, disallowing external flash access makes debugging and updating our device much more difficult.
To circumvent these issues, we will use an encryption oracle capsule: this Tock kernel module will allow applications to request decryption of some ciphertext, using a kernel-internal key not exposed to applications themselves. This is a commonly used paradigm in root of trust systems such as TPMs or OpenTitan, which feature hardware-embedded keys that are unique to a chip and hardened against key-readout attacks.
Our kernel module will use a hard-coded symmetric encryption key (AES-128 CTR-mode), embedded in the kernel binary. While this does not actually meaningfully increase the security of our example application, it demonstrates how Tock can be integrated with root of trust hardware to securely store and use encryption keys in a networked IoT device.
In the interest of time, we provide a completed kernel module with the needed
userspace bindings (in oracle.h) to you. If you are interested in seeing how
this would be implemented, we provide a thorough walkthrough of creating an
encryption oracle in the
Tock USB Security Key Tutorial.
Let's use this to securely decrypt our sensor data!
EXERCISE: Decrypt the encrypted sensor data UDP packets. and update handleUdpRecv(...) to print both unencrypted packets and decrypted packets.
Recall, we have decided to structure our encrypted packets as follows:
|--- HEADER ---|--- IV ---|--- ENCRYPTED DATA --- | 3 bytes 16 bytes (N) bytesTo denote our Super Secure System encrypted packets, we use a header of {"R","O","T"} (root of trust) followed by our initialization vector (IV). The IV is a component of AES128CTR and is needed as an input for decrypting our data.
CHECKPOINT 03_encrypted_data_final
Congratulations! You now have a complete Tock application that can attach to an OpenThread network and use Tock's ability to securely store/decrypt data. This concludes this tutorial module.
Dynamic Application Loading and Secure Policies with Tock
Tock enables a host of security features not possible with other embedded system OSes. Tock kernels can enforce strict isolation and least privilege for applications through mechanisms including application signing, system call filtering, and resource controls. Platforms running Tock can strongly reason about the capabilities entrusted to each application.
Further, Tock platforms are designed to be dynamic, with applications updating over time. Tock supports loading new applications at runtime without interrupting existing processes.
This module will walk you through some of these features and how Tock supports many security features not otherwise possible on resource-constrained embedded systems.
Goal
Traditionally, for an application to be installed on a Tock supported board, one
must use tockloader, a tool that offers users various ways to interact with
the OS. Typically, applications are installed using tockloader install which
writes the application to the board and restarts the device.
Imagine if your phone restarted each time you had to update an app!
To allow for a seamless application loading experience, in this tutorial we will
add required kernel components and a supporting userspace application that
enables Tock to live-update apps, without using tockloader, other external
tools, nor requiring a restart.
Then we will use cryptographic application signing to enforce per-process security properties for running Tock applications.
Hardware Notes
Any hardware that supports Tock should work, although this module will build on the nrf52840dk board.
nRF52840dk Hardware Setup

There are a couple of configurations on the nRF52840DK board that you should double-check:
- The "Power" switch in the corner near the USB should be set to "On".
- The "nRF power source" switch in the middle of the board (under the screen) should be set to "VDD".
- The "nRF ONLY | DEFAULT" switch on the side near the LEDs should be set to "DEFAULT".
Organization and Getting Oriented to Tock
This module will refer to some Tock components. This section briefly describes the general structure of Tock that you will need to be somewhat familiar with to follow the module.
Using Tock consists of two main building blocks:
- The Tock kernel, which runs as the operating system on the board. This is compiled from the Tock repository.
- Userspace applications, which run as processes and are compiled and loaded separately from the kernel.
The Tock kernel is compiled specifically for a particular hardware device,
termed a "board". The location of the top-level file for the kernel on a
specific board is in the Tock repository, under /tock/boards/<board name>. Any
time you need to compile the kernel or edit the board file, you will go to that
folder. You also install the kernel on the hardware board from that directory.
Userspace applications are stored in a separate repository, either libtock-c or libtock-rs (for C and Rust applications, respectively). Those applications are compiled within those repositories.
Stages
These pre-setup is done for you if you are using the tutorial configuration for
the nRF52840dk board:
tock/boards/tutorials/nrf52840dk-dynamic-apps-and-policies. You can jump right
to the Main Tutorial.
Pre-setup
If you are using a different hardware platform, you will need to follow these three setup guides first to add required support to the base kernel image provided for a board by default:
To get the screen functional for this tutorial, you need to make a minor change to the
apps_regionsvariable:#![allow(unused)] fn main() { let apps_regions = kernel::static_init!( [capsules_extra::screen_shared::AppScreenRegion; 3], [ capsules_extra::screen_shared::AppScreenRegion::new( create_short_id_from_name("process_manager", 0x0), 0, // x 0, // y 16 * 8, // width 7 * 8 // height ), capsules_extra::screen_shared::AppScreenRegion::new( create_short_id_from_name("counter", 0x0), 0, // x 7 * 8, // y 8 * 8, // width 1 * 8 // height ), capsules_extra::screen_shared::AppScreenRegion::new( create_short_id_from_name("temperature", 0x0), 8 * 8, // x 7 * 8, // y 8 * 8, // width 1 * 8 // height ) ] ); }
Main Tutorial
This module is broken into 3 stages:
- Experimenting with the Process Manager userspace application.
- Installing Applications with the App loader helper application.
- Exploring Security Mechanisms via Syscall Filtering
Using the Process Manager Userspace Application
The Process Manager application is an interactive, screen-based application for viewing and controlling the applications installed on a Tock board. This guide will help you install it and walk you through its features.
Tock Kernel Image
If you haven't already, install the
tutorials/nrf52840dk-dynamic-apps-and-policies kernel
on your board.
$ cd tock/boards/tutorials/nrf52840dk-dynamic-apps-and-policies
$ make install
If you are using a different hardware platform, be sure to follow the pre-setup steps in the overview before proceeding.
Install the Process Manager Application
You can install the Process Manager app like any other Tock application. You can
find it in
libtock-c/examples/tutorials/dynamic-apps-and-policies/process_manager.
$ cd libtock-c/examples/tutorials/dynamic-apps-and-policies/process_manager
$ make
$ tockloader install
Exploring with the Process Manager Application
When the Tock kernel is running the Process Manager should be shown on the screen:

Interact with the application using the buttons:
┌────────────────────────────────────────────────────────────────────┐
│ │
│ LED1 ☐ ☐ LED2 │
│ LED3 ☐ ☐ LED4 │
│ ┌────────────────┐ │
│ │ │ ╲
├───┐ │ │ │
│USB│ │ Screen │ │
├───┘ │ │ ┌─┐ ┌─┐ │
│ │ │ Up--│O│ │O│ │
│ └────────────────┘ └─┘1 └─┘2 │
│ ┌─┐ ┌─┐ │
│ Down--│O│ │O│--Enter ╱
│ └─┘3 └─┘4 │
└────────────────────────────────────────────────────────────────────┘
| nRF52840dk Button Number | Action |
|---|---|
| 1 | Up |
| 2 | unused |
| 3 | Down |
| 4 | Enter |
Process Manager supports inspecting and controlling existing processes and installing new applications.
Viewing Active Processes
Scroll to "Inspect Processes" and hit enter (BUTTON 4). This will list all
active processes (including the Process Manager application). You can scroll up
and down to look through all installed applications.
Details on a Specific Process
Scroll to a desired application such that it is highlighted on the screen. Press
the enter button (BUTTON 4) to select it. You will now see a list of details
about that application.
| Entry | Name | Description |
|---|---|---|
| PID | ProcessId | The ProcessId is the runtime identifier for the process. Every time a process starts it gets a new ProcessId. All process IDs must be unique. |
| ShortID | ShortId | The ShortId is the fixed identifier for a specific application. Each Tock kernel uses a policy for determining the ShortId. This identifier is persistent across reboots and restarts. |
| Timeslices Exp | Expired Timeslices | The number of times the process exceeded its timeslice and was pre-empted by the kernel. |
| Syscall Count | Number of System Calls | How many system calls the process has made. |
| Restart Count | Number of Restarts | How many times the process has been restarted, either manually or after a crash. |
| State | Process State | The current state of the process. Most likely Yielded because the Process Manager must be running to update the screen. |
| State Control | Change the Process State | Control the process by changing its state. See below. |
Controlling a Specific Process
The Process Manager application also enables you to control the execution of a
process. Highlight State Control and press enter. With the action field
highlighted, press enter to scroll through the available actions:
| Operation | Description |
|---|---|
| Start | Resume running a stopped process. |
| Stop | Halt a running process such that it is no longer scheduled to run. |
| Fault | Cause a process to crash and have the kernel run the process's fault handler. |
| Terminate | Stop a process and have its resources released. |
| Boot | Start running a terminated or never started process. |
Choose the action for the selected process and then press down to highlight
OK, and then enter to perform that action.
Not all actions are valid from all process states. In particular, boot is only valid when the process is terminated, and start and stop are only valid when the process is running or yielded.
Now that you have the Process Manager running, let's take advantage of the app loading functionality in the next section.
App Loader Userspace Application
The App Loader userspace application works in tandem with the Process Manager app and enables the user to install applications during runtime interactively using the Dynamic App Loading mechanism.
This section assumes that you have the correct kernel image
(tutorials/nrf52840dk-dynamic-apps-and-policies) installed on your device.
Install the AppLoader Application
You can install the AppLoader app like any other Tock application. You can find
it in libtock-c/examples/tutorials/dynamic-apps-and-policies/app_loader.
$ cd libtock-c/examples/tutorials/dynamic-apps-and-policies/app_loader
$ make install
Once this application is installed, the user does not have to install other apps using tockloader again!
Exploring the AppLoader's Offerings
Once you have the app installed, you should be able to navigate to the
Load New Applications menu option. When you select it, you will be taken to a
new page titled Select Application, but for now there is nothing on that page.

Getting to this stage proves that our app is now functional. However, we still want to be able to load new apps, so we need to make some changes.
Adding Our First Test App
All we need to do is include the path to the application directory in our
app_loader's makefile. To do this, open the Makefile located at
libtock-c/examples/tutorials/dynamic-apps-and-policies/app_loader/Makefile in
your favorite editor.
You don't need to know how makefiles work, or how to read one for the purpose of this tutorial. We will only making one change to add new applications. Find this block of code:
APPS_TO_EMBED := \
# $(TOCK_USERLAND_BASE_DIR)/examples/blink \
And uncomment the blink line.
This tells the makefile that we want to be able to load blink during runtime and
not manually. Once this line is uncommented, we need to run make again. But
this time, we can directly run make install to build the image and flash it to
our device.
Once the new application is flashed on the device, navigate to Load New
Applications on the device again. You will now see blink as an available
option. When you select the blink option, you will be taken to a confirmation
screen asking if you really want to load the application. Select Yes and wait.
Once the application is installed and loaded, you will see a Loading Success
page on the screen, but even more exciting is that the onboard LEDs are now
blinking!
Go back to the main menu and select Inspect Processes. If you scroll down, you
can see blink is now on the list of active processes that you can interact
with just like in Process Manager.
As an aside, check loadable_binaries.h in the app_loader directory. It
should be updated to include the details of the blink app. This is how we
embed external applications to app_loader and make them available for
installation during runtime.
Installing Your Own Applications!
You can choose to follow a similar method to test out other applications
available in the examples folder or in examples/tests. Try installing the
c_hello app and verify that it works by passing it to the app_loader and
installing the app via the menu.
You are even encouraged to write your own applications, maybe make modifications
to existing examples in your own directory, or write a whole custom app for the
nrf51840DK.
APPS_TO_EMBED := \
$(TOCK_USERLAND_BASE_DIR)/examples/blink \
$(TOCK_USERLAND_BASE_DIR)/(your application's path)
Now, there is a high chance you will see something reminiscent of static from old cable televisions. While not that exciting, this means the screen is not fully utilized and there are apps for whom that screen real estate is reserved.
Filling the Screen
If you look at the dynamic-apps-and-policies directory, you will notice there
are other application directories in addition to app_loader and
process_manager. First, let us install the counter app. Like with blink in
the previous section, we need to add the path where the counter app resides to
our APPS_TO_EMBED variable in the makefile.
APPS_TO_EMBED := \
$(TOCK_USERLAND_BASE_DIR)/examples/blink \
$(TOCK_USERLAND_BASE_DIR)/examples/tutorials/dynamic-apps-and-policies/counter \
Run make install once again. Once the device is flashed, navigate to the new
applications list and install counter like you did with blink. You should
see a counter that updates its count with a random interval between each update!
Now, to fill the remaining gap, we add the final application to the loadable
list. Add temperature to the makefile like you did with counter and install
the application. Once installed, you will see the bottom right corner of the
screen display the internal temperature of the chip!
Check this out: Watch the count as the temperature app is installed. It keeps going up! The counter app does not use any nonvolatile storage. But, since dynamically loading apps does not reset the kernel (or any running apps) the counter keeps its count.
Looking more closely at our apps...
Not everything is as it seems... if you watch the serial console, you will see
that one of the apps you just installed is doing more than what it claims to be
doing. The temperature app is sneakily logging your button presses! This is a
derivative of keylogging attacks.
At the core of it, we want our system to be secure and not leak information to applications that is not meant for them. To restrict applications to only use the resources they require for their functioning, we need to make kernel side changes to add resource filtering.
Let us take a deeper look at this in the Snooping part of the tutorial, next.
Snooping on Hardware Events
Tock by default makes all system call interfaces accessible to all applications.
However, part of the configuration for a Tock kernel in the
Kernel Resources
trait is a system call filter:
#![allow(unused)] fn main() { pub trait KernelResources { /// The implementation of the system call filtering mechanism the kernel /// will use. type SyscallFilter: SyscallFilter; ... } }
The
SyscallFilter
trait includes a single function filter_syscall():
#![allow(unused)] fn main() { pub trait SyscallFilter { fn filter_syscall(&self, process: &dyn Process, syscall: &Syscall) -> Result<(), ErrorCode> } }
This function is called on every system call from userspace before the kernel
handles the system call. If the function returns Ok() the system call
proceeds. If the function returns an Err(ErrorCode) that error is returned to
the process and the system call is not executed.
In this module we will explore how we can use a SyscallFilter implementation
to enforce stronger security properties for a Tock system.
Eavesdropping on Button Presses
We use the buttons to navigate the interface on the Process Manager application.
However, any application can register button notifications. To see this, we can
observe a perhaps unexpected operation of the "temperature" application.
If we run tockloader listen to observe the console output from the board, you
will see additional messages from the "temperature" app while interacting with
the Process Manager app:
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAF0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
Processes Loaded at Main:
[0] temperature
ShortId: 0xfb713632
[1] counter
ShortId: 0xf7b60a92
[2] process_manager
ShortId: 0xfc5167b0
[Temp App] Snooped button 2
[Temp App] Snooped button 0
[Temp App] Snooped button 2
[Temp App] Snooped button 2
[Temp App] Snooped button 2
[Temp App] Snooped button 0
[Temp App] Snooped button 2
[Temp App] Snooped button 3
[Temp App] Snooped button 3
[Temp App] Snooped button 2
Maybe maliciously, or maybe for some benign future use, the temperature app is logging all button presses!
As a demonstration of how to securely partition resources on a shared embedded platform, our goal in this lesson is to prevent a theoretically innocuous app (temperature) from eavesdropping on our button presses.
System Call Filtering Approach
To securely restrict access to the buttons to only the Process Manager application we need two things:
- A way to cryptographically verify which process is the Process Manager application.
- A system call filtering policy that only allows the Process Manager application to access the buttons system call.
To accomplish these in this module, we are going to setup an additional application signing key that we will only use for the Process Manager application. We will configure the kernel that if an app is signed with that special key then it will have access to the buttons. All other apps will be denied access to the buttons.
To record which key was used to sign each applications, we will use a specific
AppId assigning algorithm. We will encode the signing key identifier into the
upper four bits of the 32-bit ShortId for the app. This is the first hex
digit. An application that was not cryptographically signed will have this
nibble set to 0xF. An application signed with the first key will have this set
to 0, second key will be 1, and so on.
AppIdis the system that Tock uses to cryptographically attach an identifier to Tock applications. The mechanism is meant to be very flexible to support a wide range of use cases. The common wayAppIdis used is by assigning a 32-bitShortIdto each application when that process is loaded. Multiple processes can belong to the same application (e.g., different versions of the same app) and the kernel will ensure that only one process per application is ever executed at the same time.You can read more about
AppIdhere.
Now, the ShortId for each process will include information about the signing
key used to sign the app. We will use this information to determine if the
buttons should be filtered.
Application ID Assignment
The kernel configuration for the tutorial board is already setup to assign
ShortIds based on the signing key used when verifying the app's signature. The
format of the ShortId looks like this:
32 28 0 bits
+----------+------------------------+
| metadata | CRC(name) |
+----------+------------------------+
And the code to implement this requires creating a custom implementation of the
Compress
trait. This must create the ShortId based on the results from the signature
checker. The signature checker saves the key ID that verified the signature in
the "metadata" field from the accepted credential.
The general structure of that assignment policy looks like:
#![allow(unused)] fn main() { pub struct AppIdAssignerNameMetadata {} impl kernel::process_checker::Compress for AppIdAssignerNameMetadata { fn to_short_id(&self, process: &ProcessBinary) -> ShortId { // Get the stored metadata returned when this process had its credential // checked. If there is no accepted credential use 0xF. let metadata = process.credential.get().map_or(0xF, |accepted_credential| { accepted_credential .metadata .map_or(0xF, |metadata| metadata.metadata) as u32 }); let name = process.header.get_package_name().unwrap_or(""); let sum = kernel::utilities::helpers::crc32_posix(name.as_bytes()); // Combine the metadata and CRC into the short id. let sid = ((metadata & 0xF) << 28) | (sum & 0xFFFFFFF); core::num::NonZeroU32::new(sid).into() } } }
You can see the full implementation in
tock/boards/tutorials/nrf52840dk-dynamic-apps-and-policies/src/app_id_assigner_name_metadata.rs.
Setting Up A Second Signature Verification Key
Tock's signature checking mechanism supports multiple verifying keys. We need to add a second public key to the kernel configuration so we can sign the Process Info app to give it the advanced permissions (e.g., access to buttons).
We have included a second public-private ECDSA key pair in the
libtock-c/examples/tutorials/dynamic-apps-and-policies/keys folder. You may
use these. If you are interested in setting up the keys yourself, you can follow
the ECDSA Setup Guide to generate your own key pair.
Once you have the public key that the kernel will use to do the signature
verification, you will need to add the key to
tock/boards/tutorials/nrf52840dk-dynamic-apps-and-policies/src/main.rs. We
need to modify the verifying_keys object to include the second key. To get the
bytes of the second public key (the private key files hold both keys), run:
$ tail -c 64 ec-secp256r1-manager-key.private.p8 | hexdump -v -e '1/1 "0x%02x, "'
Task: Modify the
verifying_keysobject in main.rs to add the second key.
Re-Signing the Process Manager App
Finally, we need to change the signature used to sign the Process Manager app. We can do this with the existing TAB.
$ cd libtock-c/examples/tutorials/dynamic-apps-and-policies/process-manager
$ tockloader tbf credential delete ecdsap256
$ tockloader tbf credential add ecdsap256 --private-key ../keys/ec-secp256r1-manager-key.private.pem
You can also modify the application's Makefile to use the other key when the application is compiled.
Checkpoint: Verify that the Process Manager application is being verified with the second key. You can check this by verifying that the
ShortIdcomputed by the kernel starts with0x1(instead of0x0). TheShortIdis printed to the console when the kernel boots.
Re-Enabling the Screen for Process Manager
You may have noticed that the Process Manager no longer works. This is because
it no longer has access to the screen. The Tock kernel allocates regions of the
screen to different apps based on their ShortId, but we just changed Process
Manager's ShortId!
To fix this, we need to update the short ID used to assign a region of screen for the Process Manager. The screen allocation looks like this in main.rs:
#![allow(unused)] fn main() { let apps_regions = kernel::static_init!( [capsules_extra::screen_shared::AppScreenRegion; 3], [ capsules_extra::screen_shared::AppScreenRegion::new( // ***** Need to change 0x0 to 0x1 ***** ----↘ create_short_id_from_name("process_manager", 0x0), 0, // x 0, // y 16 * 8, // width 7 * 8 // height ), capsules_extra::screen_shared::AppScreenRegion::new( create_short_id_from_name("counter", 0x0), 0, // x 7 * 8, // y 8 * 8, // width 1 * 8 // height ), capsules_extra::screen_shared::AppScreenRegion::new( create_short_id_from_name("temperature", 0x0), 8 * 8, // x 7 * 8, // y 8 * 8, // width 1 * 8 // height ) ] ); let screen = components::screen::ScreenSharedComponent::new().finalize(); }
Task: Modify the arguments to create_short_id_from_name() for the Process
Manager to set the key metadata to 0x1.
Checkpoint: After re-flashing the kernel verify that the Process Manager app continues to work and that the buttons work to interact with the app.
System Call Filtering
Now with the ShortId conveying which key signed each app, effectively encoding
its authority, we can now implement our system call filtering policy.
The implementation of a system call filter looks like this. You can find the
full starter code in
tock/boards/tutorials/nrf52840dk-dynamic-apps-and-policies/src/system_call_filter.rs.
#![allow(unused)] fn main() { use kernel::errorcode::ErrorCode; use kernel::process::Process; use kernel::syscall::Syscall; pub struct DynamicPoliciesCustomFilter {} impl SyscallFilter for DynamicPoliciesCustomFilter { fn filter_syscall(&self, process: &dyn Process, syscall: &Syscall) -> Result<(), ErrorCode> { // Get the upper four bits of the ShortId. let signing_key_id = if let ShortId::Fixed(fixed_id) = process.short_app_id() { ((u32::from(fixed_id) >> 28) & 0xF) as u8 } else { 0xff_u8 }; // Enforce the correct policy based on the signing key and the system // call. // // Documentation for system call: // https://docs.tockos.org/kernel/syscall/enum.syscall#implementations match signing_key_id { 0 => Ok(()), 1 => Ok(()), _ => Ok(()), } } } }
We also need two other helpful pieces of information: how to get the system call driver number and how to get the driver number for buttons:
#![allow(unused)] fn main() { let driver_num = syscall.driver_number(); let button_driver_num = capsules_core::button::DRIVER_NUM; }
Task: finish the implementation for the SyscallFilter that only permits
system calls for buttons if the signing key is 1.
Putting It All Together
Now, if you haven't already, you need to:
- Re-install the kernel with the new key for verification and system call filtering policy.
- Re-install the process-info application with the new signature.
Once those steps are completed, Process Manager should work just as it did before. The temperature app continues to work, which we can verify by holding our finger on the nRF52840 IC and seeing the temperature rise.
However, when we run tockloader listen we no longer see the button print
messages because the temperature app no longer has access to the buttons:
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAF0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
tock$ Processes Loaded at Main:
[0] app_loader
ShortId: 0x1f37c81
[1] process_manager
ShortId: 0x1c5167b0
[2] counter
ShortId: 0x7b60a92
[3] temperature
ShortId: 0xb713632
[4] blink
ShortId: 0xfd19e248
[Temp App] Error: Unable to access the buttons.
[Process Manager] Discovered App Loader Service
Checkpoint: You now have Tock running with multiple concurrent applications, multiple signing keys, and per-app system call filtering. This enables us to securely ensure that only the Process Manager app has access to the buttons.
If you want to continue to explore how Tock can enforce properties for applications, here are some ideas you might investigate:
- Modify the system call filter to only allow the Process Manager app to access the
process infosystem call, and the App Loader app to access theapp loadersystem call.- Prevent unsigned apps from running at all.
- Have applications signed with two keys (e.g. by the developer and the app store).
- Use the
ShortIdTBF header to assign short IDs rather than a CRC of the app name.
Conclusion
This concludes our tutorial on using Tock to dynamically inspect and load apps and use cryptographic signatures to restrict access to system calls. We hope you enjoyed it!
We covered the following topics:
- an interactive, screen-based tool for inspecting the state of Tock processes
- dynamically loading new applications at runtime without restarting the kernel
- signing applications with ECDSA signing keys
- implementing least-privilege with system call filtering
Tock is an operating system applicable to a broad set of application domains, such as low-power and security-critical systems. We provide a broad set of guides and documentation:
- This book: https://book.tockos.org
- Tock code documentation: https://docs.tockos.org
- Reference documentation: https://github.com/tock/tock/tree/master/doc
We also provide some community resources, which you can find here: https://tockos.org/community/
We always appreciate feedback on our tutorials. What went well? What did you like? What was not so smooth? What was less interesting? How can we make things better? Please do not hesitate to reach out, and if you have found any smaller typographical or technical errors, pull requests are welcome and appreciated!
Tock Sensing Board
This tutorial introduces you to building a device using Tock, going from how the kernel starts, to writing a userspace application, to customizing how Tock runs individual applications.
Tutorial Stages
- Kernel Startup: How the kernel starts running an initializes the OS.
- Application Development: Writing a sensing application.
- Kernel Policies: Configuring the kernel to use per-process policies.
Kernel Boot and Setup
The goal of this module is to make you comfortable with the Tock kernel, how it is structured, how the kernel is setup at boot, and how capsules provide additional kernel functionality.
During this you will:
- Learn how Tock uses Rust's memory safety to provide isolation for free
- Read the Tock boot sequence, seeing how Tock uses static allocation
- Learn about Tock's event-driven programming
The Tock Boot Sequence
The very first thing that runs on a Tock board is an assembly function called
initialize_ram_jump_to_main(). Rust requires that memory is configured before
any Rust code executes, so this must run first. As the function name implies,
control is then transferred to the main() function in the board's main.rs
file. Tock intentionally tries to give the board as much control over the
operation of the system as possible, hence why there is very little between
reset and the board's main function being called.
Open the main.rs file for your board in your favorite editor. This file
defines the board's platform: how it boots, what capsules it uses, and what
system calls it supports for userland applications.
How is everything organized?
Find the declaration of "platform" struct. This is typically called
struct Platform or named based on the name of the board (it's pretty early in
the file). This declares the structure representing the platform. It has many
fields, many of which are capsules that make up the board's platform. These
fields are resources that the board needs to maintain a reference to for future
use, for example for handling system calls or implementing kernel policies.
Recall that everything in the kernel is statically allocated. We can see that
here. Every field in the platform struct is a reference to an object with a
static lifetime.
Many capsules themselves take a lifetime as a parameter, which is currently
always 'static.
The boot process is primarily the construction of this platform structure. Once
everything is set up, the board will pass the constructed platform object to
kernel::kernel_loop and we're off to the races.
How do things get started?
After RAM initialization, the reset handler invokes the main() function in the
board main.rs file. main() is typically rather long as it must setup and
configure all of the drivers and capsules the board needs. Many capsules depend
on other, lower layer abstractions that need to be created and initialized as
well.
Take a look at the first few lines of main(). The boot sequence generally sets
up any low-level microcontroller configuration, initializes the MCU peripherals,
and sets up debugging capabilities.
How do capsules get created?
The bulk of main() create and initializes capsules which provide the main
functionality of the Tock system. For example, to provide userspace applications
with ability to display serial data, boards typically create a console
capsule. An example of this looks like:
pub unsafe fn main() { ... // Create a virtualizer on top of an underlying UART device. Use 115200 as // the baud rate. let uart_mux = components::console::UartMuxComponent::new(channel, 115200) .finalize(components::uart_mux_component_static!()); // Instantiate the console capsule. This uses the virtualized UART provided // by the uart_mux. let console = components::console::ConsoleComponent::new( board_kernel, capsules_core::console::DRIVER_NUM, uart_mux, ) .finalize(components::console_component_static!()); ... }
Eventually, once all of the capsules have been created, we will populate the platform structure with them:
pub unsafe fn main() { ... let platform = Platform { console: console, gpio: gpio, ... } }
What Are Components?
When setting up the capsules (such as console), we used objects in the
components crate to help. In Tock, components are helper objects that make it
easier to correctly create and initialize capsules.
For example, if we look under the hood of the console component, the main
initialization of console looks like:
#![allow(unused)] fn main() { impl Component for ConsoleComponent { fn finalize(self, s: Self::StaticInput) -> Console { let grant_cap = create_capability!(capabilities::MemoryAllocationCapability); let write_buffer = static_init!([u8; DEFAULT_BUF_SIZE], [0; DEFAULT_BUF_SIZE]); let read_buffer = static_init!([u8; DEFAULT_BUF_SIZE], [0; DEFAULT_BUF_SIZE]); let console_uart = static_init!( UartDevice, UartDevice::new(self.uart_mux, true) ); // Don't forget to call setup() to register our new UartDevice with the // mux! console_uart.setup(); let console = static_init!( Console<'static>, console::Console::new( console_uart, write_buffer, read_buffer, self.board_kernel.create_grant(self.driver_num, &grant_cap), ) ); // Very easy to figure to set the client reference for callbacks! hil::uart::Transmit::set_transmit_client(console_uart, console); hil::uart::Receive::set_receive_client(console_uart, console); console } } }
Much of the code within components is boilerplate that is copied for each board and easy to subtlety miss an important setup step. Components encapsulate the setup complexity and can be reused on each board Tock supports.
The static_init! macro is simply an easy way to allocate a static variable
with a call to new. The first parameter is the type, the second is the
expression to produce an instance of the type.
Components end up looking somewhat complex because they can be re-used across multiple boards and different microcontrollers. More detail here.
A brief aside on buffers:
Notice that the console needs both a read and write buffer for it to use. These buffers have to have a
'staticlifetime. This is because low-level hardware drivers, especially those that use DMA, require'staticbuffers. Since we don't know exactly when the underlying operation will complete, and we must promise that the buffer outlives the operation, we use the one lifetime that is assured to be alive at the end of an operation:'static. Other code with buffers without a'staticlifetime, such as userspace processes, use capsules likeConsoleby copying data into internal'staticbuffers before passing them to the console. The buffer passing architecture looks like this:

Let's Make a Tock Board!
The code continues on, creating all of the other capsules that are needed by the
platform. Towards the end of main(), we've created all of the capsules we
need, and it's time to create the actual platform structure
(let platform = Platform {...}).
Boards must implement two traits to successfully run the Tock kernel:
SyscallDriverLookup and KernelResources.
SyscallDriverLookup
The first, SyscallDriverLookup, is how the kernel maps system calls from
userspace to the correct capsule within the kernel. The trait requires one
function:
#![allow(unused)] fn main() { trait SyscallDriverLookup { /// Mapping of syscall numbers to capsules. fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R where F: FnOnce(Option<&dyn SyscallDriver>) -> R; } }
The with_driver() function executes the provided function f() by passing it
the correct capsule based on the provided driver_num. A brief example of an
implementation of SyscallDriverLookup looks like:
#![allow(unused)] fn main() { impl SyscallDriverLookup for Platform { fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R where F: FnOnce(Option<&dyn kernel::syscall::SyscallDriver>) -> R, { match driver_num { capsules_core::console::DRIVER_NUM => f(Some(self.console)), capsules_core::gpio::DRIVER_NUM => f(Some(self.gpio)), ... _ => f(None), } } } }
Why require each board to provide this mapping? Why not implement this mapping centrally in the kernel? Tock requires boards to implement this mapping as we consider the assignment of driver numbers to specific capsules as a platform-specific decisions. While Tock does have a default mapping of driver numbers, boards are not obligated to use them. This flexibility allows boards to expose multiple copies of the same capsule to userspace, for example.
KernelResources
The KernelResources trait is the main method for configuring the operation of
the core Tock kernel. Policies such as the syscall mapping described above,
syscall filtering, and watchdog timers are configured through this trait. More
information is contained in a separate course module.
Loading processes
Once the platform is all set up, the board is responsible for loading processes into memory:
pub unsafe fn main() { ... kernel::process::load_processes( board_kernel, chip, core::slice::from_raw_parts( &_sapps as *const u8, &_eapps as *const u8 as usize - &_sapps as *const u8 as usize, ), core::slice::from_raw_parts_mut( &mut _sappmem as *mut u8, &_eappmem as *const u8 as usize - &_sappmem as *const u8 as usize, ), &mut PROCESSES, &FAULT_RESPONSE, &process_management_capability, ) .unwrap_or_else(|err| { debug!("Error loading processes!"); debug!("{:?}", err); }); ... }
A Tock process is represented by a kernel::Process struct. In principle, a
platform could load processes by any means. In practice, all existing platforms
write an array of Tock Binary Format (TBF) entries to flash. The kernel provides
the load_processes helper function that takes in a flash address and begins
iteratively parsing TBF entries and making Processes.
A brief aside on capabilities:
To call
load_processes(), the board had to provide a reference to a&process_management_capability. Theload_processes()function internally requires significant direct access to memory, and it should only be called in very specific places. To prevent its misuse (for example from within a capsule), calling it requires a capability to be passed in with the arguments. To create a capability, the calling code must be able to callunsafe, Code (i.e. capsules) which cannot useunsafetherefore has no way to create a capability and therefore cannot call the restricted function.
Starting the kernel
Finally, the board passes a reference to the current platform, the chip the platform is built on (used for interrupt and power handling), and optionally an IPC capsule to start the main kernel loop:
#![allow(unused)] fn main() { board_kernel.kernel_loop(&platform, chip, Some(&platform.ipc), &main_loop_capability); }
From here, Tock is initialized, the kernel event loop takes over, and the system enters steady state operation.
Write an Environmental Sensing Application
To start we will focus on creating a sensing application that can collect data by reading sensors.
Setup
You will need the libtock library to provide the library functions for calling
system calls provided by the Tock kernel. We will use libtock-c, which you can
clone:
git clone https://github.com/tock/libtock-c
Make sure you can compile an application:
cd libtock-c/examples/blink
make
Create a Hello World Application
Create a new folder in the libtock-c/examples folder called simsense. Copy
the Makefile from the blink app.
cd examples
mkdir simsense
cp blink/Makefile simsense
Now create main.c in simsense/ and create a basic hello world application:
#include <stdio.h>
int main(void) {
printf("Hello, World!\n");
}
Background on
printf()The code uses the standard C library routine
printfto compose a message using a format string and print it to the console. Let's break down what the code layers are here:
printf()is provided by the C standard library (implemented by newlib). It takes the format string and arguments, and generates an output string from them. To actually write the string to standard out,printfcalls_write._write(inlibtock-c'ssys.c) is a wrapper for actually writing to output streams (in this case, standard out a.k.a. the console). It calls the Tock-specific console writing functionputnstr.putnstr(inlibtock-c'sconsole.c) is a buffers data to be written, callsputnstr_async, and acts as a synchronous wrapper, yielding until the operation is complete.- Finally,
putnstr_async(inlibtock-c'sconsole.c) performs the actual system calls, calling toallow,subscribe, andcommandto enable the kernel to access the buffer, request a callback when the write is complete, and begin the write operation respectively.The application could accomplish all of this by invoking Tock system calls directly, but using libraries makes for a much cleaner interface and allows users to not need to know the inner workings of the OS.
Loading the Application
Okay, let's build and load this simple program.
-
Erase all other applications from the development board:
tockloader erase-apps -
Build the application and load it (Note:
tockloader installautomatically searches the current working directory and its subdirectories for Tock binaries.)make tockloader install -
Check that it worked with a separate terminal:
tockloader listenThe output should look something like:
$ tockloader listen No device name specified. Using default "tock" Using "/dev/cu.usbserial-c098e5130012 - Hail IoT Module - TockOS" Listening for serial output. Hello, World!
Checkpoint: You can compile and run your own Hello World app.
Discovering Sensors
Now we want to go beyond printing fixed strings and sample onboard sensors. Because Tock separates apps from the kernel, an application doesn't necessarily know which sensors are available. To start, we will test for various sensors and see which are available.
Background
Tock apps use system calls to communicate with the kernel. Drivers for various kernel drivers (e.g. accessing sensors, controlling LEDs, or printing serial messages) are identified by a
DRIVER_NUM. Apps can then callCommands for each driver, where commands are identified by aCOMMAND_NUM.To aid with discovery,
COMMAND_NUM == 0is reserved as an existence check. Userspace apps can call aCommandsyscall with theCOMMAND_NUMof 0 and check the return value. IfSUCCESS, that driver exists.
Check for Ambient Light Sensor
Let's start by checking if our board has an ambient light sensor. The library
interface for
ambient light
is in the libtock-c/libtock folder.
We can use the libtock_ambient_light_exists() function. In main.c of our
simsense app:
#include <stdio.h>
#include <libtock-sync/sensors/ambient_light.h>
int main(void) {
printf("Checking for ambient light sensor.\n");
printf("Ambient Light: ");
if (libtock_ambient_light_exists()) {
printf("Exists!\n");
} else {
printf("Does not exist.\n");
}
}
Compile and run your updated app.
Tip: To see which apps are loaded on a board, run
tockloader list.
Checkpoint: You can check if you have an ambient light sensor. What is the result for your hardware?
Check for Additional Sensors
The next step is to check for other sensor types (you might not have a light sensor). Expand your application to check for other sensors. Some you might use:
Checkpoint: Your app now checks for the presence of several sensors. Which are available on your board?
Sampling Data from Available Sensors
Now that we know which sensors are available, we want to get data from the sensors that exist.
Use the libtock libraries to sample the sensors. For simplicity, you want to use
the functions which end in _sync so you can avoid writing the asynchronous
code.
Print the readings to the serial console. As a starting point, consider the following code:
int take_measurement(void) {
int val;
int ret;
ret = sensor_sample_sync(&val);
if (ret == RETURNCODE_SUCCESS) {
printf("Sensor Reading: %d\n", val);
}
}
Background
libtock-cis split into two libraries:libtock(asynchronous) andlibtock-sync(synchronous). Thelibtocklibrary does not call yield and therefore only exposes asynchronous APIs. Thelibtock-synclibrary calls thelibtocklibrary internally but adds calls to yield to provide a synchronous API.The libraries are split so applications can clearly choose to use the synchronous APIs or not.
Example: Ambient Light
The interface in libtock/sensors/ambient_light.h is used to measure ambient
light conditions in lux. imix uses the
ISL29035
sensor, but the userland library is abstracted from the details of particular
sensors. It contains the function:
#include <libtock-sync/sensors/ambient_light.h>
returncode_t libtocksync_ambient_light_read_intensity(int* lux);
Note that the light reading is written to the location passed as an argument, and the function returns non-zero in the case of an error.
Example: Temperature
The interface in libtock/sensors/temperature.h is used to measure ambient
temperature in degrees Celsius, times 100. imix uses the
SI7021
sensor. It contains the function:
#include <libtock-sync/sensors/temperature.h>
returncode_t libtocksync_temperature_read(int* temperature);
Again, this function returns non-zero in the case of an error.
Checkpoint: Your app prints readings from all available sensors.
Take Multiple Readings
Finally to complete our sensor we want to take multiple sensor readings. Put
your sampling code in a loop. Use the delay_ms() function to sample only
periodically.
You'll find the interface for timers in libtock-sync/services/alarm.h. The
function you'll find useful today is:
#include <libtock-sync/services/alarm.h>
int libtocksync_alarm_delay_ms(uint32_t ms);
This function sleeps until the specified number of milliseconds have passed, and then returns. So we call this function "synchronous": no further code will run until the delay is complete.
An example loop structure:
int main(void) {
while (1) {
take_measurement();
libtocksync_alarm_delay_ms(2000);
}
}
Checkpoint: You app prints readings from each sensors multiple times.
Blink the LED on Samples
To be able to see if our device is sampling periodically without observing the console output, we will add an LED toggle on each sample. This is straightforward in Tock:
#include <libtock/interface/led.h>
int main(void) {
while (1) {
take_measurement();
libtock_led_toggle(0);
libtocksync_alarm_delay_ms(2000);
}
}
Checkpoint: You have an environmental sensing application!
Tock Kernel Policies
As a kernel for a security-focused operating system, the Tock kernel is responsible for implementing various policies on how the kernel should handle processes. Examples of the types of questions these policies help answer are: What happens when a process has a hardfault? Is the process restarted? What syscalls are individual processes allowed to call? Which process should run next? Different systems may need to answer these questions differently, and Tock includes a robust platform for configuring each of these policies.
Background on Relevant Tock Design Details
If you are new to this aspect of Tock, this section provides a quick primer on the key aspects of Tock which make it possible to implement process policies.
The KernelResources Trait
The central mechanism for configuring the Tock kernel is through the
KernelResources trait. Each board must implement KernelResources and provide
the implementation when starting the main kernel loop.
The general structure of the KernelResources trait looks like this:
#![allow(unused)] fn main() { /// This is the primary method for configuring the kernel for a specific board. pub trait KernelResources<C: Chip> { /// How driver numbers are matched to drivers for system calls. type SyscallDriverLookup: SyscallDriverLookup; /// System call filtering mechanism. type SyscallFilter: SyscallFilter; /// Process fault handling mechanism. type ProcessFault: ProcessFault; /// Context switch callback handler. type ContextSwitchCallback: ContextSwitchCallback; /// Scheduling algorithm for the kernel. type Scheduler: Scheduler<C>; /// Timer used to create the timeslices provided to processes. type SchedulerTimer: scheduler_timer::SchedulerTimer; /// WatchDog timer used to monitor the running of the kernel. type WatchDog: watchdog::WatchDog; // Getters for each policy/mechanism. fn syscall_driver_lookup(&self) -> &Self::SyscallDriverLookup; fn syscall_filter(&self) -> &Self::SyscallFilter; fn process_fault(&self) -> &Self::ProcessFault; fn context_switch_callback(&self) -> &Self::ContextSwitchCallback; fn scheduler(&self) -> &Self::Scheduler; fn scheduler_timer(&self) -> &Self::SchedulerTimer; fn watchdog(&self) -> &Self::WatchDog; } }
Many of these resources can be effectively no-ops by defining them to use the
() type. Every board that wants to support processes must provide:
- A
SyscallDriverLookup, which maps theDRIVERNUMin system calls to the appropriate driver in the kernel. - A
Scheduler, which selects the next process to execute. The kernel provides several common schedules a board can use, or boards can create their own.
Application Identifiers
The Tock kernel can implement different policies based on different levels of trust for a given app. For example, a trusted core app written by the board owner may be granted full privileges, while a third-party app may be limited in which system calls it can use or how many times it can fail and be restarted.
To implement per-process policies, however, the kernel must be able to establish a persistent identifier for a given process. To do this, Tock supports process credentials which are hashes, signatures, or other credentials attached to the end of a process's binary image. With these credentials, the kernel can cryptographically verify that a particular app is trusted. The kernel can then establish a persistent identifier for the app based on its credentials.
A specific process binary can be appended with zero or more credentials. The
AppCredentialsPolicy then uses these credentials to establish if the kernel
should run this process. If the credentials policy approves the process, the
AppIdPolicy determines what identifier it should have. The Tock kernel design
does not impose any restrictions on how applications or processes are
identified. For example, it is possible to use a SHA256 hash of the binary as an
identifier, or a RSA4096 signature as the identifier. As different use cases
will want to use different identifiers, Tock avoids specifying any constraints.
However, long identifiers are difficult to use in software. To enable more
efficiently handling of application identifiers, Tock also includes mechanisms
for a per-process ShortId which is stored in 32 bits. This can be used
internally by the kernel to differentiate processes. As with long identifiers,
ShortIds are set by AppIdPolicy (specifically the Compress trait) and are
chosen on a per-board basis. The only property the kernel enforces is that
ShortIds must be unique among processes installed on the board. For boards that
do not need to use ShortIds, the ShortId type includes a LocallyUnique option
which ensures the uniqueness invariant is upheld without the overhead of
choosing distinct, unique numbers for each process.
#![allow(unused)] fn main() { pub enum ShortId { LocallyUnique, Fixed(core::num::NonZeroU32), } }
Module Overview
In this module, we are going to experiment with using the KernelResources
trait to implement per-process restart policies. We will create our own
ProcessFaultPolicy that implements different fault handling behavior based on
whether the process included a hash in its credentials footer.
Custom Process Fault Policy
A process fault policy decides what the kernel does with a process when it crashes (i.e. hardfaults). The policy is implemented as a Rust module that implements the following trait:
#![allow(unused)] fn main() { pub trait ProcessFaultPolicy { /// `process` faulted, now decide what to do. fn action(&self, process: &dyn Process) -> process::FaultAction; } }
When a process faults, the kernel will call the action() function and then
take the returned action on the faulted process. The available actions are:
#![allow(unused)] fn main() { pub enum FaultAction { /// Generate a `panic!()` with debugging information. Panic, /// Attempt to restart the process. Restart, /// Stop the process. Stop, } }
Let's create a custom process fault policy that restarts signed processes up to a configurable maximum number of times, and immediately stops unsigned processes.
We start by defining a struct for this policy:
#![allow(unused)] fn main() { pub struct RestartTrustedAppsFaultPolicy { /// Number of times to restart trusted apps. threshold: usize, } }
We then create a constructor:
#![allow(unused)] fn main() { impl RestartTrustedAppsFaultPolicy { pub const fn new(threshold: usize) -> RestartTrustedAppsFaultPolicy { RestartTrustedAppsFaultPolicy { threshold } } } }
Now we can add a template implementation for the ProcessFaultPolicy trait:
#![allow(unused)] fn main() { impl ProcessFaultPolicy for RestartTrustedAppsFaultPolicy { fn action(&self, process: &dyn Process) -> process::FaultAction { process::FaultAction::Stop } } }
To determine if a process is trusted, we will use its ShortId. A ShortId is
a type as follows:
#![allow(unused)] fn main() { pub enum ShortId { /// No specific ID, just an abstract value we know is unique. LocallyUnique, /// Specific 32 bit ID number guaranteed to be unique. Fixed(core::num::NonZeroU32), } }
If the app has a short ID of ShortId::LocallyUnique then it is untrusted (i.e.
the kernel could not validate its signature or it was not signed). If the app
has a concrete number as its short ID (i.e. ShortId::Fixed(u32)), then we
consider the app to be trusted.
To determine how many times the process has already been restarted we can use
process.get_restart_count().
Putting this together, we have an outline for our custom policy:
#![allow(unused)] fn main() { use kernel::process; use kernel::process::Process; use kernel::process::ProcessFaultPolicy; pub struct RestartTrustedAppsFaultPolicy { /// Number of times to restart trusted apps. threshold: usize, } impl RestartTrustedAppsFaultPolicy { pub const fn new(threshold: usize) -> RestartTrustedAppsFaultPolicy { RestartTrustedAppsFaultPolicy { threshold } } } impl ProcessFaultPolicy for RestartTrustedAppsFaultPolicy { fn action(&self, process: &dyn Process) -> process::FaultAction { let restart_count = process.get_restart_count(); let short_id = process.short_app_id(); // Check if the process is trusted. If so, return the restart action // if the restart count is below the threshold. Otherwise return stop. // If the process is not trusted, return stop. process::FaultAction::Stop } } }
TASK: Finish implementing the custom process fault policy.
Save your completed custom fault policy in your board's src/ directory as
trusted_fault_policy.rs. Then add mod trusted_fault_policy; to the top of
the board's main.rs file.
Testing Your Custom Fault Policy
First we need to configure your kernel to use your new fault policy.
-
Find where your
fault_policywas already defined. Update it to use your new policy:#![allow(unused)] fn main() { let fault_policy = static_init!( trusted_fault_policy::RestartTrustedAppsFaultPolicy, trusted_fault_policy::RestartTrustedAppsFaultPolicy::new(3) ); } -
Now we need to configure the process loading mechanism to use this policy for each app.
#![allow(unused)] fn main() { kernel::process::load_processes( board_kernel, chip, flash, memory, &mut PROCESSES, fault_policy, // this is where we provide our chosen policy &process_management_capability, ) } -
Now we can compile the updated kernel and flash it to the board:
# in your board directory: make install
Now we need an app to actually crash so we can observe its behavior. Tock has a
test app called crash_dummy that causes a hardfault when a button is pressed.
Compile that and load it on to the board:
-
Compile the app:
cd libtock-c/examples/tests/crash_dummy make -
Install it on the board:
tockloader install
With the new kernel installed and the test app loaded, we can inspect the status of the board. Use tockloader to connect to the serial port:
tockloader listen
Note: if multiple serial port options appear, generally the lower numbered port is what you want to use.
Now we can use the onboard console to inspect which processes we have on the board. Run the list command:
tock$ list
PID Name Quanta Syscalls Restarts Grants State
0 crash_dummy 0 6 0 1/15 Yielded
Note that crash_dummy is in the Yielded state. This means it is just waiting
for a button press.
Press the first button on your board (it is "Button 1" on the nRF52840-dk). This will cause the process to fault. You won't see any output, and since the app was not signed it was just stopped. Now run the list command again:
tock$ list
PID Name Quanta Syscalls Restarts Grants State
0 crash_dummy 0 6 0 0/15 Faulted
Now the process is in the Faulted state! This means the kernel will not try to
run it. Our policy is working! Next we have to verify signed apps so that we can
restart trusted apps.
App Credentials
With our custom fault policy, we can implement different responses based on whether an app is trusted or not. Now we need to configure the kernel to verify apps, and check if we trust them or not. For this example we will use a simple credential: a sha256 hash. This credential is simple to create, and serves as a stand-in for more useful credentials such as cryptographic signatures.
This will require a couple pieces:
- We need to actually include the hash in our app.
- We need a mechanism in the kernel to check the hash exists and is valid.
Signing Apps
We can use Tockloader to add a hash to a compiled app.
First, compile the app:
$ cd libtock-c/examples/blink
$ make
Now, add the hash credential:
$ tockloader tbf credential add sha256
It's fine to add to all architectures or you can specify which TBF to add it to.
To check that the credential was added, we can inspect the TAB:
$ tockloader inspect-tab
You should see output like the following:
$ tockloader inspect-tab
[INFO ] No TABs passed to tockloader.
[STATUS ] Searching for TABs in subdirectories.
[INFO ] Using: ['./build/blink.tab']
[STATUS ] Inspecting TABs...
TAB: blink
build-date: 2023-06-09 21:52:59+00:00
minimum-tock-kernel-version: 2.0
tab-version: 1
included architectures: cortex-m0, cortex-m3, cortex-m4, cortex-m7
Which TBF to inspect further? cortex-m4
cortex-m4:
version : 2
header_size : 104 0x68
total_size : 16384 0x4000
checksum : 0x722e64be
flags : 1 0x1
enabled : Yes
sticky : No
TLV: Main (1) [0x10 ]
init_fn_offset : 41 0x29
protected_size : 0 0x0
minimum_ram_size : 5068 0x13cc
TLV: Program (9) [0x20 ]
init_fn_offset : 41 0x29
protected_size : 0 0x0
minimum_ram_size : 5068 0x13cc
binary_end_offset : 8360 0x20a8
app_version : 0 0x0
TLV: Package Name (3) [0x38 ]
package_name : kv_interactive
TLV: Kernel Version (8) [0x4c ]
kernel_major : 2
kernel_minor : 0
kernel version : ^2.0
TLV: Persistent ACL (7) [0x54 ]
Write ID : 11 0xb
Read IDs (1) : 11
Access IDs (1) : 11
TBF Footers
Footer
footer_size : 8024 0x1f58
Footer TLV: Credentials (128)
Type: SHA256 (3) ✓ verified
Length: 32
Footer TLV: Credentials (128)
Type: Reserved (0)
Length: 7976
Note at the bottom, there is a Footer TLV with SHA256 credentials! Because
tockloader was able to double-check the hash was correct there is ✓ verified
next to it.
SUCCESS: We now have an app with a hash credential!
Verifying Credentials in the Kernel
To have the kernel check that our hash credential is present and valid, we need to add a credential checker before the kernel starts each process.
In main.rs, we need to create the app checker. Tock includes a basic SHA256
credential checker, so we can use that:
#![allow(unused)] fn main() { // Create the software-based SHA engine. let sha = components::sha::ShaSoftware256Component::new() .finalize(components::sha_software_256_component_static!()); // Create the credential checker. let checking_policy = components::appid::checker_sha::AppCheckerSha256Component::new(sha) .finalize(components::app_checker_sha256_component_static!()); // Create the AppID assigner. let assigner = components::appid::assigner_name::AppIdAssignerNamesComponent::new() .finalize(components::appid_assigner_names_component_static!()); // Create the process checking machine. let checker = components::appid::checker::ProcessCheckerMachineComponent::new(checking_policy) .finalize(components::process_checker_machine_component_static!()); }
To use the checker, we must switch to asynchronous process loading. Many boards by default use a synchronous loader which iterates through flash discovering processes. However, to verify credentials, we need asynchronous operations during loading and therefore need an asynchronous process loader.
#![allow(unused)] fn main() { // Create and start the asynchronous process loader. let loader = components::loader::sequential::ProcessLoaderSequentialComponent::new( checker, &mut *addr_of_mut!(PROCESSES), board_kernel, chip, fault_policy, assigner, storage_permissions_policy, app_flash, app_memory, ) .finalize(components::process_loader_sequential_component_static!( nrf52840::chip::NRF52<Nrf52840DefaultPeripherals>, kernel::process::ProcessStandardDebugFull, NUM_PROCS )); }
(Instead of the kernel::process::load_processes(...) function.)
Compile and install the updated kernel.
SUCCESS: We now have a kernel that can check credentials!
Installing Apps and Verifying Credentials
Now, our kernel will only run an app if it has a valid SHA256 credential. To verify this, recompile and install the blink app but do not add credentials:
cd libtock-c/examples/blink
touch main.c
make
tockloader install --erase
Now, if we list the processes on the board with the process console:
$ tockloader listen
Initialization complete. Entering main loop
NRF52 HW INFO: Variant: AAF0, Part: N52840, Package: QI, Ram: K256, Flash: K1024
tock$ list
PID Name Quanta Syscalls Restarts Grants State
tock$
You can see our app does not show up. That is because it did not pass the credential check.
We can see this more clearly by updating the kernel to use the
ProcessLoadingAsyncClient client. We can implement this client for Platform:
#![allow(unused)] fn main() { impl kernel::process::ProcessLoadingAsyncClient for Platform { fn process_loaded(&self, result: Result<(), kernel::process::ProcessLoadError>) { match result { Ok(()) => {}, Err(e) => { kernel::debug!("Process failed to load: {:?}", e); } } } fn process_loading_finished(&self) { } } }
And then configure it with the loader:
#![allow(unused)] fn main() { loader.set_client(platform); }
Now re-compiling and flashing the kernel and we will see the process load error when the kernel boots.
To fix this, we can add the SHA256 credential.
cd libtock-c/examples/blink
tockloader tbf credential add sha256
tockloader install
Now when we list the processes, we see:
tock$ list
PID ShortID Name Quanta Syscalls Restarts Grants State
0 0x3be6efaa blink 0 323 0 1/16 Yielded
And we can verify the app is both running and now has a specifically assigned short ID.
Implementing the Privileged Behavior
The default operation is not quite what we want. We want all apps to run, but only credentialed apps to be restarted.
First, we need to allow all apps to run, even if they don't pass the credential check. Doing that is actually quite simple. We just need to modify the credential checker we are using to not require credentials.
In tock/capsules/system/src/process_checker/basic.rs, modify the
require_credentials() function to not require credentials:
#![allow(unused)] fn main() { impl AppCredentialsChecker<'static> for AppCheckerSha256 { fn require_credentials(&self) -> bool { false // change from true to false } ... } }
Then recompile and install. Now both processes should run:
tock$ list
PID ShortID Name Quanta Syscalls Restarts Grants State
0 0x3be6efaa blink 0 193 0 1/16 Yielded
1 Unique c_hello 0 8 0 1/16 Yielded
But note, only the credential app (blink) has a specific short ID.
Second, we need to use the presence of a specific short ID in our fault policy to only restart credentials apps. We just need to check if the short ID is fixed or not:
#![allow(unused)] fn main() { impl ProcessFaultPolicy for RestartTrustedAppsFaultPolicy { fn action(&self, process: &dyn Process) -> process::FaultAction { let restart_count = process.get_restart_count(); let short_id = process.short_app_id(); // Check if the process is trusted based on whether it has a fixed short // ID. If so, return the restart action if the restart count is below // the threshold. Otherwise return stop. match short_id { kernel::process::ShortId::LocallyUnique => process::FaultAction::Stop, kernel::process::ShortId::Fixed(_) => { if restart_count < self.threshold { process::FaultAction::Restart } else { process::FaultAction::Stop } } } } } }
That's it! Now we have the full policy: we verify application credentials, and handle process faults accordingly.
Task: Compile and install multiple applications, including the crash dummy app, and verify that only credentialed apps are successfully restarted.
SUCCESS: We now have implemented an end-to-end security policy in Tock!
Graduation
Now that you have the basics of Tock down, we encourage you to continue to explore and develop with Tock! This book includes a "slimmed down" version of Tock to make it easy to get started, but you will likely want to get a more complete development environment setup to continue. Luckily, this shouldn't be too difficult since you have the tools installed already.
Using the latest kernel
The Tock kernel is actively developed, and you likely want to build upon the latest features. To do this, you should get the Tock source from the repository:
$ git clone https://github.com/tock/tock
While the master branch tends to be relatively stable, you may want to use the
latest release instead. Tock is
thoroughly tested before a release, so this should be a reliable place to start.
To select a release, you should checkout the correct tag. For example, for the
1.4 release this looks like:
$ cd tock
$ git checkout release-1.4
You should use the latest release. Check the releases page for the name of the latest release.
Now, you can compile the board-specific kernel in the Tock repository. For example, to compile the kernel for imix:
$ cd boards/imix
$ make
All of the operations described in the course should work the same way on the main repository.
Using the full selection of apps
The book includes some very minimal apps, and many more can be found in the
libtock-c repository. To use this, you should start by cloning the repository:
$ git clone https://github.com/tock/libtock-c
Now you can compile and run apps inside of the examples folder. For instance, you can install the basic "Hello World!" app:
$ cd libtock-c/examples/c_hello
$ make
$ tockloader install
With the libtock-c repository you have access to the full suite of Tock apps,
and additional libraries include BLE and Lua support.
Course Setup Guides
Many of the Tock guides have specific hardware platforms they were developed for with pre-configured kernels available to use on a board. However, the course guides are generally designed to be able to run on other hardware, however, in those cases there will not be a pre-configured kernel. These guides include the instructions on how to setup various kernel features required for various modules in the courses.
Guides
Using a Screen with Tock
This guide describes how to configure the Tock kernel to support a screen (i.e., a graphical display). We will be exposing the screen as a resource to userspace applications.
Note: this guide is designed around using a SSD1306-based screen. However, other displays are supported in Tock and you can adapt these instructions to configure the screen hardware you are using.
Configuring the Kernel
Kernel setup requires two main steps:
- Instantiating a driver for the screen hardware you are using.
- Instantiating a syscall capsule for providing a userpsace syscall interface.
Setting Up the Screen Hardware Driver
Commonly, configuring the screen hardware driver means including a component in
the kernel's main() function.
For the SSD1306 on the nRF52840, that can be done with:
#![allow(unused)] fn main() { type I2cBus = nrf52840::i2c::TWI; // Create virtual i2c bus for the screen. I2C address for the screen is 0x3c. let ssd1306_i2c = components::i2c::I2CComponent::new(i2c_bus, 0x3c) .finalize(components::i2c_component_static!(I2cBus)); // Create the screen driver. let ssd1306 = components::ssd1306::Ssd1306Component::new(ssd1306_i2c, true) .finalize(components::ssd1306_component_static!(I2cBus)); // Run the initialization commands for the screen. ssd1306.init_screen(); }
If you are using a different MCU, you will have to set the correct type for the I2C hardware.
Since the SSD1306 screen uses an I2C interface, we do need to setup an I2C bus. That may already be done in the kernel you are using, but if not, here is an example for the nRF52840:
#![allow(unused)] fn main() { const SCREEN_I2C_SDA_PIN: Pin = Pin::P1_10; const SCREEN_I2C_SCL_PIN: Pin = Pin::P1_11; // Create the I2C bus driver. let i2c_bus = components::i2c::I2CMuxComponent::new(&nrf52840_peripherals.nrf52.twi1, None) .finalize(components::i2c_mux_component_static!(I2cBus)); // Configure the I2C bus to use the correct pins and clock rate. nrf52840_peripherals.nrf52.twi1.configure( nrf52840::pinmux::Pinmux::new(SCREEN_I2C_SCL_PIN as u32), nrf52840::pinmux::Pinmux::new(SCREEN_I2C_SDA_PIN as u32), ); nrf52840_peripherals .nrf52 .twi1 .set_speed(nrf52840::i2c::Speed::K400); }
Setting Up the Screen System Call Interface
With the hardware driver configured, we now want to expose the screen to userspace via the system call interface. Tock supports two variants of the screen system call interface:
- A version (
screen.rs) which gives all processes access to the entire screen. - A version (
screen_shared.rs) which uses processes'AppIds to give specific applications access to specific regions of the screen.
You must choose which one you want to provide from your kernel.
Option 1: Simple Screen (All Processes Have Full Access)
Instantiate the screen syscall driver capsule using the component. You will pass in the screen hardware driver from the previous step.
#![allow(unused)] fn main() { let screen = components::screen::ScreenComponent::new( board_kernel, capsules_extra::screen::DRIVER_NUM, ssd1306, None, ) .finalize(components::screen_component_static!(1032)); }
We can configure the screen type the board uses:
#![allow(unused)] fn main() { // Screen type ScreenDriver = components::screen::ScreenComponentType; }
Option 2: Shared Screen (Processes Have Specific Screen Regions)
The shared screen component is very similar to the screen component, however, we
must also provide a mapping of applications to the regions of the screen they
have access to. To identify applications we use the AppId mechanism,
specifically apps' ShortIds. We use pixels to identify regions assigned to
each application.
Here is an example assigning three regions (the left side of the screen, the top
right, and the bottom right) to three separate applications. We must create the
ShortIds for each app, and how to do that is based on the AppId assignment
policy. The example here uses a CRC of the process name to create a fixed
ShortId. Different kernels might use different assignment policies and this
setup needs to match.
#![allow(unused)] fn main() { fn crc(s: &'static str) -> u32 { kernel::utilities::helpers::crc32_posix(s.as_bytes()) } let app1_appid = kernel::process::ShortId::Fixed(core::num::NonZeroU32::new(crc("app1_name")).unwrap()) let app2_appid = kernel::process::ShortId::Fixed(core::num::NonZeroU32::new(crc("app2_name")).unwrap()) let app3_appid = kernel::process::ShortId::Fixed(core::num::NonZeroU32::new(crc("app3_name")).unwrap()) let apps_regions = static_init!( [capsules_extra::screen_shared::AppScreenRegion; 3], [ capsules_extra::screen_shared::AppScreenRegion::new( app1_appid, 0, // x 0, // y 8 * 8, // width 8 * 8 // height ), capsules_extra::screen_shared::AppScreenRegion::new( app2_appid, 8 * 8, // x 0, // y 8 * 8, // width 4 * 8 // height ), capsules_extra::screen_shared::AppScreenRegion::new( app3_appid, 8 * 8, // x 4 * 8, // y 8 * 8, // width 4 * 8 // height ) ] ); }
Once we have those mappings we can instantiate the SharedScreen with the
screen hardware driver and the permissions:
#![allow(unused)] fn main() { let screen = components::screen::ScreenSharedComponent::new( board_kernel, capsules_extra::screen::DRIVER_NUM, ssd1306, apps_regions, ) .finalize(components::screen_shared_component_static!(1032, Screen)); }
#![allow(unused)] fn main() { // Screen type ScreenDriver = components::screen::SharedScreenComponentType; }
Exposing the System Call Driver to Userspace
With the appropriate syscall driver capsule setup, we now can add it to the platform struct and expose the interface to userspace.
#![allow(unused)] fn main() { struct Platform { ... screen: &'static ScreenDriver, ... } }
then set it when instantiation the Platform:
#![allow(unused)] fn main() { let platform = Platform { ... screen, ... }; }
then set up the driver number for the syscall:
#![allow(unused)] fn main() { impl SyscallDriverLookup for Platform { fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R where F: FnOnce(Option<&dyn kernel::syscall::SyscallDriver>) -> R, { match driver_num { ... capsules_extra::screen::DRIVER_NUM => f(Some(self.screen)), ... } } } }
Attaching a SSD1306 Screen to the nRF52840dk
For various Tock Tutorials we have created a SSD1306 screen adapter for the nRF52840dk. This adapter simply maps pins and does not add any additional circuits/components.

You can connect an SSD1306-based OLED to the nRF52840dk without that adapter board by jumpering pins.
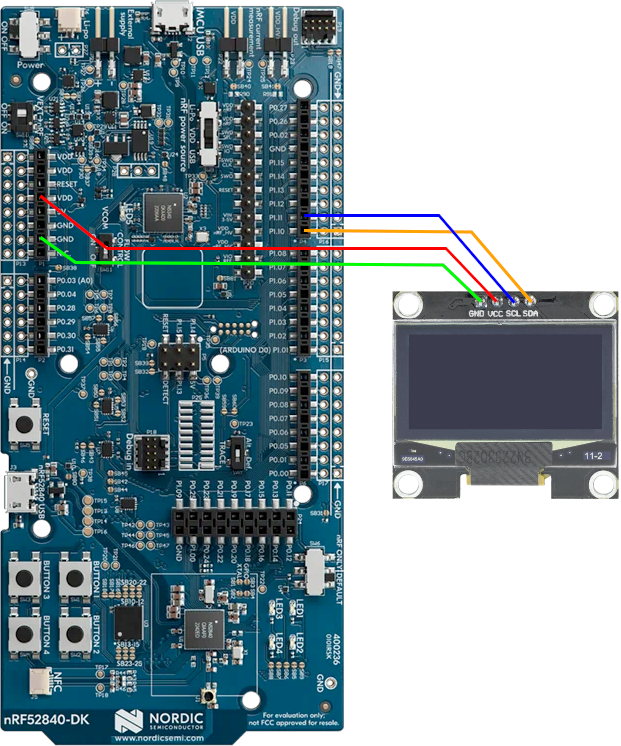
The pin mapping is:
| SSD1306 | nRF52840dk |
|---|---|
| SCL | P1.11 |
| SDA | P1.10 |
| VCC | VDD |
| GND | GND |
There are many SSD1306 OLED screens available for purchase. Generally any of
them should work. The 128x64 pixel screens tend to come in two sizes: 0.96" and
1.3". However, in our experience the physically larger 1.3" screens are
often listed as using the SSD1306 chip, but actually use the SH1106 chip.
These two are similar, but not exactly the same. It can be difficult to
determine exactly what you are buying. If you have a SSD1306 OLED screen and it
seems to be just showing static, you might actually have the SH1106. Tock has a
driver for that chip as well, and you can update your kernel to use the
Sh1106Component component instead.
Using the Screen in an Application
You can run a simple screen test app by installing the Sierpiński carpet test libtock-c app.
U8G2 Library
Drawing on a screen with a raw pixel buffer is difficult. Tock supports a simple graphics library called U8G2 that makes drawing graphics easier. You can try this by installing on the of the U8G2 demos, such as the circle demo.

Implementing a USB Keyboard Device
The Tock kernel supports implementing a USB device and we can setup our kernel so that it is recognized as a USB keyboard device. This allows the Tock board to effectively "type" into a host machine.
Background
This module configures your hardware board to be a USB HID device. From Wikipedia:
The USB human interface device class (USB HID class) is a part of the USB specification for computer peripherals: it specifies a device class (a type of computer hardware) for human interface devices such as keyboards, mice, game controllers and alphanumeric display devices.
The USB HID class describes devices used with nearly every modern computer. Many predefined functions exist in the USB HID class. These functions allow hardware manufacturers to design a product to USB HID class specifications and expect it to work with any software that also meets these specifications.
Enabling USB HID will allow your board to operate as a normal keyboard. As far as your computer is concerned, you plugged in a USB keyboard. This means your board and microcontroller can "type" to your computer.
Configuring the Kernel
We need to setup our kernel to include USB support, and particularly the USB HID
(keyboard) profile. This requires modifying the board's lib.rs file. These
steps will guide you through adding the USB HID device as a new resource
provided by the Tock kernel on your hardware board. You will also expose this
resource to userspace via the syscall interface.
1. USB Strings
You first need to create three strings that will represent this device to the USB host.
You should add the following setup near the end of lib.rs, just before the
creating the Platform struct.
#![allow(unused)] fn main() { // Create the strings we include in the USB descriptor. let strings = static_init!( [&str; 3], [ "Nordic Semiconductor", // Manufacturer "nRF52840dk - TockOS", // Product "serial0001", // Serial number ] ); }
2. Include USB HID Capsule Type
Now we need to instantiate the keyboard USB capsule in the board. This capsule provides the USB Keyboard HID stack needed to interface with the USB hardware and provide an interface to communicate as a HID device.
In general, adding a capsule to a Tock kernel can be somewhat cumbersome. To
simplify this, we use what we call a "component" to bundle all of the setup. We
can use the pre-made KeyboardHidComponent component.
First we define a type for the capsule, which is board-specific as it refers to the specific microcontroller on the board. This type can become unwieldy and redundant, so specifying a type makes adding the same capsule and component to multiple boards more consistent.
Near the top of the lib.rs file, include the correct definitions based on your
board. In particular, the UsbHw definition must match the type of the USB
hardware driver for your specific microcontroller.
#![allow(unused)] fn main() { // USB Keyboard HID - for nRF52840dk type UsbHw = nrf52840::usbd::Usbd<'static>; // For any nRF52840 board. type KeyboardHidDriver = components::keyboard_hid::KeyboardHidComponentType<UsbHw>; // ------------------------------ // USB Keyboard HID - for imix type UsbHw = sam4l::usbc::Usbc<'static>; // For any SAM4L board. type KeyboardHidDriver = components::keyboard_hid::KeyboardHidComponentType<UsbHw>; }
3. Include USB HID Capsule Component
Once we have the type we can include the actual component. This should go below
the strings object declared before.
Again the usb_device variable must match for your specific board. Choose the
type correctly from the examples in the code snippet.
#![allow(unused)] fn main() { // For nRF52840dk let usb_device = &nrf52840_peripherals.usbd; // For imix let usb_device = &peripherals.usbc; // Generic HID Keyboard component usage let (keyboard_hid, keyboard_hid_driver) = components::keyboard_hid::KeyboardHidComponent::new( board_kernel, capsules_core::driver::NUM::KeyboardHid as usize, usb_device, 0x1915, // Nordic Semiconductor 0x503a, strings, ) .finalize(components::keyboard_hid_component_static!(UsbHw)); }
4. Activate USB HID Support
Include the USB client trait:
#![allow(unused)] fn main() { use kernel::hil::usb::Client; }
Towards the end of the lib.rs, you need to enable the USB HID driver:
#![allow(unused)] fn main() { keyboard_hid.enable(); keyboard_hid.attach(); }
5. Expose USB HID to Userspace
Finally, we need to make sure that userspace applications can use the USB HID interface.
First, we need to keep track of a reference to our USB HID stack by adding the
driver to the Platform struct:
#![allow(unused)] fn main() { pub struct Platform { ... keyboard_hid_driver: &'static KeyboardHidDriver, ... } }
and then adding the object to where Platform is constructed:
#![allow(unused)] fn main() { let platform = Platform { ... keyboard_hid_driver, ... }; }
Next we need to map syscalls from userspace to our kernel driver by editing the
SyscallDriverLookup implementation for the board:
#![allow(unused)] fn main() { // Keyboard HID Driver Num: const KEYBOARD_HID_DRIVER_NUM: usize = capsules_core::driver::NUM::KeyboardHid as usize; impl SyscallDriverLookup for Platform { fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R where F: FnOnce(Option<&dyn kernel::syscall::SyscallDriver>) -> R, { match driver_num { ... KEYBOARD_HID_DRIVER_NUM => f(Some(self.keyboard_hid_driver)), ... } } } }
Compiling and Installing the Kernel
Now you should be able to compile the kernel and load it on to your board.
cd tock/boards/<board name>
make install
Connecting the USB Device
We will use both USB cables on our hardware. The main USB header is for debugging and programming. The USB header connected directly to the microcontroller will be the USB device. Ensure both USB devices are connected to your computer.
Testing the USB Keyboard
To test the USB keyboard device will will use a simple userspace application. libtock-c includes an example app which just prints a string via USB keyboard when a button is pressed.
cd libtock-c/examples/tests/keyboard_hid
make
tockloader install
Position your cursor somewhere benign, like a new terminal. Then press a button on the board.
Checkpoint: You should see a welcome message from your hardware!
Using HMAC-SHA256 in Userspace
This guide explains how to setup an HMAC engine for userspace to use. Tock already includes HMAC-SHA256 as a capsule within the kernel, we just need to expose it to userspace.
HMAC Background
An HMAC engine is a necessary tool for many use cases, including for a HOTP security key. FromWikipedia:
An HMAC...is a specific type of message authentication code (MAC) involving a cryptographic hash function and a secret cryptographic key. As with any MAC, it may be used to simultaneously verify both the data integrity and authenticity of a message. An HMAC is a type of keyed hash function that can also be used in a key derivation scheme or a key stretching scheme.
An HMAC is computed roughly using the following equation (for simplicity this omits details on padding):
HMAC = Hash(Key + Hash(Key + Message))
The result is a output the length of the output of the hash function used. Because the key is used inside the hash operation, only someone who knows the secret key can compute the correct HMAC (authenticity). And because the message is used inside the hash operation, if the message is altered the HMAC will no longer match (integrity).
HMAC supports any hash function, but the specific hash function used affects the resulting HMAC. Therefore we must specify. In this example, we will use the SHA256 hash algorithm. That means the resulting HMAC will be 32 bytes long.
Configuring the Kernel
1. Define Types for HMAC
For convenience we declare the component types at the top of main.rs for the HMAC capsules.
As we are using a software implementation of the SHA-256 algorithm, we do not need to customize any types for our specific microcontroller.
Include this near the top of main.rs (above the Platform struct):
#![allow(unused)] fn main() { // HMAC type HmacSha256Software = components::hmac::HmacSha256SoftwareComponentType< capsules_extra::sha256::Sha256Software<'static>, >; type HmacDriver = components::hmac::HmacComponentType<HmacSha256Software, 32>; }
2. Instantiate the Components
Next we need to use components to instantiate a software implementation of SHA256 and HMAC-SHA256. Add this towards the bottom of your main.rs file.
#![allow(unused)] fn main() { //-------------------------------------------------------------------------- // HMAC-SHA256 //-------------------------------------------------------------------------- let sha256_sw = components::sha::ShaSoftware256Component::new() .finalize(components::sha_software_256_component_static!()); let hmac_sha256_sw = components::hmac::HmacSha256SoftwareComponent::new(sha256_sw).finalize( components::hmac_sha256_software_component_static!(capsules_extra::sha256::Sha256Software), ); let hmac = components::hmac::HmacComponent::new( board_kernel, capsules_extra::hmac::DRIVER_NUM, hmac_sha256_sw, ) .finalize(components::hmac_component_static!(HmacSha256Software, 32)); }
3. Expose HMAC to Userspace
Next add these capsules to the Platform struct:
#![allow(unused)] fn main() { pub struct Platform { ... hmac: &'static HmacDriver, ... } let platform = Platform { ... hmac, ... }; }
And make them accessible to userspace by adding to the with_driver function:
#![allow(unused)] fn main() { impl SyscallDriverLookup for Platform { fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R where F: FnOnce(Option<&dyn kernel::syscall::SyscallDriver>) -> R, { match driver_num { ... capsules_extra::hmac::DRIVER_NUM => f(Some(self.hmac)), ... } } } }
Testing
You should be able to install the libtock-c/examples/tests/hmac app and run
it:
cd libtock-c/examples/tests/hmac
make
tockloader install
Checkpoint: HMAC is now accessible to userspace!
Using Key-Value Storage in Userspace
To enable persistent storage across reboots, we can use Tock's Key-Value (KV) interface. This allows userspace applications to store data in the form of key-value pairs. Applications can retrieve data by querying for the given key.
Checking if Key-Value Support Already Exists
Having key-value support is useful for many cases, and so it is possible that your board already has key-value support enabled.
To check this, load the kv_check test app onto your board:
cd libtock-c/examples/tests/kv_check
make
tockloader install
Run tockloader listen and reset the board. You should see the following output
if KV support exists:
[KV] Check for Key-Value Support
Key-Value support is enabled.
If KV support already exists, you can skip this module!
Configuring the Kernel
Again we will use components to add key-value support to the kernel.
1. Include the Key-Value Stack Types
The KV stack includes many layers which leads to rather complex types. For more information about the KV stack in Tock, see the TicKV reference. To simplify somewhat, we define a series of types used at each layer of the stack. Include these towards the top of main.rs:
#![allow(unused)] fn main() { // TicKV type Mx25r6435f = components::mx25r6435f::Mx25r6435fComponentType< nrf52840::spi::SPIM<'static>, nrf52840::gpio::GPIOPin<'static>, nrf52840::rtc::Rtc<'static>, >; const TICKV_PAGE_SIZE: usize = core::mem::size_of::<<Mx25r6435f as kernel::hil::flash::Flash>::Page>(); type Siphasher24 = components::siphash::Siphasher24ComponentType; type TicKVDedicatedFlash = components::tickv::TicKVDedicatedFlashComponentType<Mx25r6435f, Siphasher24, TICKV_PAGE_SIZE>; type TicKVKVStore = components::kv::TicKVKVStoreComponentType< TicKVDedicatedFlash, capsules_extra::tickv::TicKVKeyType, >; type KVStorePermissions = components::kv::KVStorePermissionsComponentType<TicKVKVStore>; type VirtualKVPermissions = components::kv::VirtualKVPermissionsComponentType<KVStorePermissions>; type KVDriver = components::kv::KVDriverComponentType<VirtualKVPermissions>; }
Note the first type is the underlying flash driver where the KV database is actually stored. This will need to be customized for your specific board and flash device.
2. Include the KV Components
Now we can use those types to instantiate the components for each layer of the KV stack:
#![allow(unused)] fn main() { //-------------------------------------------------------------------------- // TICKV //-------------------------------------------------------------------------- // Static buffer to use when reading/writing flash for TicKV. let page_buffer = static_init!( <Mx25r6435f as kernel::hil::flash::Flash>::Page, <Mx25r6435f as kernel::hil::flash::Flash>::Page::default() ); // SipHash for creating TicKV hashed keys. let sip_hash = components::siphash::Siphasher24Component::new() .finalize(components::siphasher24_component_static!()); // TicKV with Tock wrapper/interface. let tickv = components::tickv::TicKVDedicatedFlashComponent::new( sip_hash, mx25r6435f, 0, // start at the beginning of the flash chip (capsules_extra::mx25r6435f::SECTOR_SIZE as usize) * 32, // arbitrary size of 32 pages page_buffer, ) .finalize(components::tickv_dedicated_flash_component_static!( Mx25r6435f, Siphasher24, TICKV_PAGE_SIZE, )); // KVSystem interface to KV (built on TicKV). let tickv_kv_store = components::kv::TicKVKVStoreComponent::new(tickv).finalize( components::tickv_kv_store_component_static!( TicKVDedicatedFlash, capsules_extra::tickv::TicKVKeyType, ), ); let kv_store_permissions = components::kv::KVStorePermissionsComponent::new(tickv_kv_store) .finalize(components::kv_store_permissions_component_static!( TicKVKVStore )); // Share the KV stack with a mux. let mux_kv = components::kv::KVPermissionsMuxComponent::new(kv_store_permissions).finalize( components::kv_permissions_mux_component_static!(KVStorePermissions), ); // Create a virtual component for the userspace driver. let virtual_kv_driver = components::kv::VirtualKVPermissionsComponent::new(mux_kv).finalize( components::virtual_kv_permissions_component_static!(KVStorePermissions), ); // Userspace driver for KV. let kv_driver = components::kv::KVDriverComponent::new( virtual_kv_driver, board_kernel, capsules_extra::kv_driver::DRIVER_NUM, ) .finalize(components::kv_driver_component_static!( VirtualKVPermissions )); }
This example is for the nRF52840dk board. You will likely need to change the
mx25r6435f flash driver to the flash driver appropriate for your board.
3. Update the Platform Struct and Expose KV to Userspace
We need to include the kv_driver in the board's platform struct:
Then add these capsules to the Platform struct:
#![allow(unused)] fn main() { pub struct Platform { ... kv_driver: &'static KVDriver, ... } let platform = Platform { ... kv_driver, ... }; }
And make the syscall interface available to userspace:
#![allow(unused)] fn main() { impl SyscallDriverLookup for Platform { fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R where F: FnOnce(Option<&dyn kernel::syscall::SyscallDriver>) -> R, { match driver_num { ... capsules_extra::kv_driver::DRIVER_NUM => f(Some(self.kv_driver)), ... } } } }
Checkpoint: Key-Value is now accessible to userspace!
Testing and Trying Out KV Storage
With KV support in your Tock kernel, you can use the applications in
libtock-c/examples/tests/kv* to experiment with KV storage. In particular, the
kv_interactive app allows you to get and set key-value pairs.
Implementing the Dynamic Application Loader
The Tock kernel supports an optional dynamic application loader component that allows an external application to store and execute new applications.
Dynamic application loading uses the app_loader capsule. This will setup the
bridge between the userspace application and the kernel for loading new
applications. The app_loader capsule requires a dynamic_binary_storage
driver to store and load the application, so we need to set that up as well.
Configuring the Kernel
We will use components to add app_loader to the kernel. We will also set up
some syscall driver types to make it portable across different hardware. To add
the proper drivers, include this in the top-level board main.rs file:
Add required components
#![allow(unused)] fn main() { //-------------------------------------------------------------------------- // Syscall Driver Type Definitions //-------------------------------------------------------------------------- type FlashUser = nrf52840::nvmc::Nvmc; type NonVolatilePages = components::dynamic_binary_storage::NVPages<FlashUser>; type DynamicBinaryStorage<'a> = kernel::dynamic_binary_storage::SequentialDynamicBinaryStorage< 'static, 'static, nrf52840::chip::NRF52<'a, Nrf52840DefaultPeripherals<'a>>, kernel::process::ProcessStandardDebugFull, NonVolatilePages, >; type AppLoaderDriver = capsules_extra::app_loader::AppLoader< DynamicBinaryStorage<'static>, DynamicBinaryStorage<'static>, >; //-------------------------------------------------------------------------- // Dynamic App Loading //-------------------------------------------------------------------------- // Create the dynamic binary flasher. let dynamic_binary_storage = components::dynamic_binary_storage::SequentialBinaryStorageComponent::new( virtual_flash_dbs, loader, ) .finalize(components::sequential_binary_storage_component_static!( FlashUser, nrf52840::chip::NRF52<Nrf52840DefaultPeripherals>, kernel::process::ProcessStandardDebugFull, )); // Create the dynamic app loader capsule. let dynamic_app_loader = components::app_loader::AppLoaderComponent::new( board_kernel, capsules_extra::app_loader::DRIVER_NUM, dynamic_binary_storage, dynamic_binary_storage, ) .finalize(components::app_loader_component_static!( DynamicBinaryStorage<'static>, DynamicBinaryStorage<'static>, )); }
Note:
- The definition of the
FlashUsertype is hardware dependent.- If there are other applications that use the
IsolatedNonvolatileStoragecapsule, we have to virtualize the flash. In that case, theFlashUsertype will look something like:#![allow(unused)] fn main() { type FlashUser = capsules_core::virtualizers::virtual_flash::FlashUser<'static, nrf52840::nvmc::Nvmc>; }and then we pass the virtual flash instance to the
dynamic_binary_storageinstance.
Update the Platform definition
The Platform struct defines all of the features supported by a Tock platform.
For the app_loader to be usable, we need to add a reference to the capsule to
the Platform struct:
#![allow(unused)] fn main() { pub struct Platform { ... dynamic_app_loader: &'static AppLoaderDriver, ... } let platform = Platform { ... dynamic_app_loader, ... }; }
And make it accessible to userspace by adding to the with_driver function:
#![allow(unused)] fn main() { impl SyscallDriverLookup for Platform { fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R where F: FnOnce(Option<&dyn kernel::syscall::SyscallDriver>) -> R, { match driver_num { ... capsules_extra::app_loader::DRIVER_NUM => f(Some(self.dynamic_app_loader)), ... } } } }
Signing Apps with ECDSA Signatures
Tock applications can be signed with a cryptographic signature to verify the authenticity of the application. This guide describes how to use ECDSA with the P256R1 curve to sign Tock applications.
Generating an ECDSA Key Pair
The first step is creating a public-private key pair for the signature. We can
do that with openssl:
$ openssl ecparam -name secp256r1 -genkey -noout -out ec-secp256r1-priv.pem
$ openssl ec -in ec-secp256r1-priv.pem -pubout -out ec-secp256r1-pub.pem
Once created, we can view the key:
$ openssl ec -in ec-secp256r1-priv.pem -text -noout
Note the "pub" key is encoded in sec1 format.
Signing a Tock App
There are two ways to sign a Tock app with the private key: (1) adding the
signature when the .tbf is created with elf2tab or (2) adding the signature
with tockloader.
Approach 1: Using elf2tab
First, we need to convert the private key from sec1 format to the pk8 format
that elf2tab expects. We can do this with openssl:
$ openssl pkcs8 -in ec-secp256r1-priv.pem -topk8 -nocrypt -outform der > ec-secp256r1-priv.p8
Now we can pass that key to elf2tab as a command line argument. This works
best if you are running elf2tab directly or if you have a custom build setup
for Tock applications.
$ elf2tab ... --ecdsa-nist-p256-private ec-secp256r1-priv.p8 ...
If you are using libtock-c, you can have an app compiled and the signature
includes by modifying the app's Makefile. Add the following line to the
Makefile:
ELF2TAB_ARGS += --ecdsa-nist-p256-private ec-secp256r1-priv.p8
Approach 2: Using tockloader
If you have an existing Tock app compiled into the .tab format, you can add
the ECDSA signature to the .tbf files within the existing .tab. To add the
signature, run the following command in the directory with your existing app:
$ tockloader tbf credential add ecdsap256 --private-key ec-secp256r1-priv.pem
Verifying the Signature in the Kernel
To instruct the kernel to verify signatures when loading apps, we need to use the signature verifier capsule with the ECDSA-P256 verifier.
First, we setup the types at the top of main.rs:
#![allow(unused)] fn main() { type Verifier = ecdsa_sw::p256_verifier::EcdsaP256SignatureVerifier<'static>; type SignatureVerifyInMemoryKeys = components::signature_verify_in_memory_keys::SignatureVerifyInMemoryKeysComponentType< Verifier, 1, 64, 32, 64, >; }
Next we have to setup the public key that we will use to verify the signature.
We need to convert the public key to a byte-array that we can include in the Rust source code.
An easy way to do that is to convert the original keypair to pk8 format (if
you didn't do this already in Approach 1 above):
$ openssl pkcs8 -in ec-secp256r1-priv-key.pem -topk8 -nocrypt -outform der > ec-secp256r1-priv-key.p8
The last 64 bytes of that file are the public key.
We can extract and format as-needed with:
$ tail -c 64 ec-secp256r1-priv-key.p8 | hexdump -v -e '1/1 "0x%02x "'
Create a buffer in main.rs with those bytes:
#![allow(unused)] fn main() { let verifying_key = kernel::static_init!( [u8; 64], [ // insert bytes here ] ); }
Then we can setup the remaining verification infrastructure:
#![allow(unused)] fn main() { let verifying_keys = kernel::static_init!([&'static mut [u8; 64]; 1], [verifying_key]); let ecdsa_p256_verifier = kernel::static_init!( ecdsa_sw::p256_verifier::EcdsaP256SignatureVerifier<'static>, ecdsa_sw::p256_verifier::EcdsaP256SignatureVerifier::new() ); ecdsa_p256_verifier.register(); let verifier_multiple_keys = components::signature_verify_in_memory_keys::SignatureVerifyInMemoryKeysComponent::new( ecdsa_p256_verifier, verifying_keys, ) .finalize( components::signature_verify_in_memory_keys_component_static!(Verifier, 1, 64, 32, 64,), ); let checking_policy = components::appid::checker_signature::AppCheckerSignatureComponent::new( sha, verifier_multiple_keys, tock_tbf::types::TbfFooterV2CredentialsType::EcdsaNistP256, ) .finalize(components::app_checker_signature_component_static!( SignatureVerifyInMemoryKeys, capsules_extra::sha256::Sha256Software<'static>, 32, 64, )); }
The checking_policy can then be used when loading processes.
Deprecated Course Modules
These modules were previously developed but may not quite match the current Tock code at this point. That is, the general ideas are still relevant and correct, but the specific code might be somewhat outdated.
We keep these for interested readers, but want to note that it might take a bit more problem solving/updating to follow these steps than originally intended.
Keep the client happy
You, an engineer newly added to a top-secret project in your organization, have been directed to commission a new imix node for your most important client. The directions you receive are terse, but helpful:
On Sunday, Nov 4, 2018, Director Hines wrote:
Welcome to the team, need you to get started right away. The client needs an
imix setup with their two apps -- ASAP. Make sure it is working, we need to keep
this client happy.
- DH
Hmm, ok, not a lot to go on, but luckily in orientation you learned how to flash a kernel and apps on to the imix board, so you are all set for your first assignment.
Poking around, you notice a folder called "important-client". While that is a good start, you also notice that it has two apps inside of it! "Alright!" you are thinking, "My first day is shaping up to go pretty smoothly."
After installing those two apps, which are a little mysterious still, you decide
that it would also be a good idea to install an app you are more familiar with:
the "blink" app. After doing all of that, you run tockloader list and see the
following:
$ tockloader list
No device name specified. Using default "tock"
Using "/dev/ttyUSB1 - imix IoT Module - TockOS"
[App 0]
Name: app2
Enabled: True
Sticky: False
Total Size in Flash: 16384 bytes
[App 1]
Name: app1
Enabled: True
Sticky: False
Total Size in Flash: 8192 bytes
[App 2]
Name: blink
Enabled: True
Sticky: False
Total Size in Flash: 2048 bytes
Finished in 1.959 seconds
Checkpoint
Make sure you have these apps installed correctly and
tockloader listproduces similar output as shown here.
Great! Now you check that the LED is blinking, and sure enough, no problems
there. The blink app was just for testing, so you tockloader uninstall blink
to remove that. So far, so good, Tock! But, before you prepare to head home
after a successful day, you start to wonder if maybe this was a little too easy.
Also, if you get this wrong, it's not going to look good as the new person on
the team.
Looking in the folders for the two applications, you notice a brief description of the apps, and a URL. Ok, maybe you can check if everything is working. After trying things for a little bit, everything seems to be in order. You tell the director the board is ready and head home a little early—you did just successfully complete your first project for a major client after all.
Back at Work the Next Day
Expecting a more challenging project after how well things went yesterday, you are instead greeted by this email:
On Monday, Nov 5, 2018, Director Hines wrote:
I know you are new, but what did you do?? I've been getting calls all morning
from the client, the imix board you gave them ran out battery already!! Are you
sure you set up the board correctly? Fix it, and get it back to me later today.
- DH
Well, that's not good. You already removed the blink app, so it can't be that. What you need is some way to inspect the board and see if something looks like it is going awry. You first try:
$ tockloader listen
to see if any debugging information is being printed. A little, but nothing helpful. Before trying to look around the code, you decided to try sending the board a plea for help:
help
and, surprisingly, it responded!
Welcome to the process console.
Valid commands are: help status list stop start
Ok! Maybe the process console can help. Try the status command:
Total processes: 2
Active processes: 2
Timeslice expirations: 4277
It seems this tool is actually able to inspect the current system and the active processes! But hmmm, it seems there are a lot of "timeslice expirations". From orientation, you remember that processes are allocated only a certain quantum of time to execute, and if they exceed that the kernel forces a context switch back to the kernel. If that is happening a lot, then the board is likely unable to go to sleep! That could explain why the battery is draining so fast!
But which process is at fault? Perhaps we should try another command. Maybe
list:
PID Name Quanta Syscalls Dropped Callbacks State
00 app2 0 336 0 Yielded
01 app1 8556 1439951 0 Running
Ok! Now we have the status of individual applications. And aha! We can clearly
see the faulty application. From our testing we know that one app detects button
presses and one app is transmitting sensor data. Let's see if we can disable the
faulty app somehow and see which data packets we are still getting. Going back
to the help command, the stop command seems promising:
stop <app name>
Time to Fix the App
After debugging, we now know a couple things about the issue:
- The name of the faulty app.
- That it is functionally correct but is for some reason consuming excess CPU cycles.
Using this information, dig into the the faulty app.
A Quick Fix
To get the director off your back, you should be able to introduce a simple fix that will reduce wakeups by waiting a bit between samples.
A Better Way
While the quick fix will slow the number of wakeups, you know that you can do better than polling for something like a button press! Tock supports asynchronous operations allowing user processes to subscribe to interrupts.
Looking at the button interface (in button.h), it looks like we'll first have to enable interrupts and then sign up to listen to them.
Once this energy-optimal patch is in place, it'll be time to kick off a triumphant e-mail to the director, and then off to celebrate!
Create a "Hello World" capsule
Now that you've seen how Tock initializes and uses capsules, you're going to write a new one. At the end of this section, your capsule will sample the humidity sensor once a second and print the results as serial output. But you'll start with something simpler: printing "Hello World" to the debug console once on boot.
The imix board configuration you've looked through has a capsule for the this
tutorial already set up. The capsule is a separate Rust crate located in
exercises/capsule. You'll complete this exercise by filling it in.
In addition to a constructor, Our capsule has start function defined that is
currently empty. The board configuration calls this function once it has
initialized the capsule.
Eventually, the start method will kick off a state machine for periodic
humidity readings, but for now, let's just print something to the debug console
and return:
#![allow(unused)] fn main() { debug!("Hello from the kernel!"); }
$ cd [PATH_TO_BOOK]/imix
$ make program
$ tockloader listen
No device name specified.
Using default "tock"
Using "/dev/ttyUSB0 - Imix IoT Module - TockOS"
Listening for serial output.
Hello from the kernel!
Extend your capsule to print "Hello World" every second
In order for your capsule to keep track of time, it will need to depend on another capsule that implements the Alarm interface. We'll have to do something similar for reading the accelerometer, so this is good practice.
The Alarm HIL includes several traits, Alarm, Client, and Frequency, all
in the kernel::hil::time module. You'll use the set_alarm and now methods
from the Alarm trait to set an alarm for a particular value of the clock. Note
that both methods accept arguments in the alarm's native clock frequency, which
is available using the Alarm trait's associated Frequency type:
#![allow(unused)] fn main() { // native clock frequency in Herz let frequency = <A::Frequency>::frequency(); }
Your capsule already implements the alarm::Client trait so it can receive
alarm events. The alarm::Client trait has a single method:
#![allow(unused)] fn main() { fn fired(&self) }
Your capsule should now set an alarm in the start method, print the debug
message and set an alarm again when the alarm fires.
Compile and program your new kernel:
$ make program
$ tockloader listen
No device name specified. Using default "tock" Using "/dev/ttyUSB0 - Imix IoT Module - TockOS"
Listening for serial output.
TOCK_DEBUG(0): /home/alevy/hack/helena/rustconf/tock/boards/imix/src/accelerate.rs:31: Hello World
TOCK_DEBUG(0): /home/alevy/hack/helena/rustconf/tock/boards/imix/src/accelerate.rs:31: Hello World
TOCK_DEBUG(0): /home/alevy/hack/helena/rustconf/tock/boards/imix/src/accelerate.rs:31: Hello World
TOCK_DEBUG(0): /home/alevy/hack/helena/rustconf/tock/boards/imix/src/accelerate.rs:31: Hello World
Extend your capsule to sample the humidity once a second
The steps for reading an accelerometer from your capsule are similar to using
the alarm. You'll use a capsule that implements the humidity HIL, which includes
the HumidityDriver and HumidityClient traits, both in
kernel::hil::sensors.
The HumidityDriver trait includes the method read_accelerometer which
initiates an accelerometer reading. The HumidityClient trait has a single
method for receiving readings:
#![allow(unused)] fn main() { fn callback(&self, humidity: usize); }
Implement logic to initiate a accelerometer reading every second and report the results.

Compile and program your kernel:
$ make program
$ tockloader listen
No device name specified. Using default "tock" Using "/dev/ttyUSB0 - Imix IoT Module - TockOS"
Listening for serial output.
Humidity 2731
Humidity 2732
Some further questions and directions to explore
Your capsule used the si7021 and virtual alarm. Take a look at the code behind each of these services:
-
Is the humidity sensor on-chip or a separate chip connected over a bus?
-
What happens if you request two humidity sensors back-to-back?
-
Is there a limit on how many virtual alarms can be created?
-
How many virtual alarms does the imix boot sequence create?
Extra credit: Write a virtualization capsule for humidity sensor (∞)
If you have extra time, try writing a virtualization capsule for the Humidity
HIL that will allow multiple clients to use it. This is a fairly open ended
task, but you might find inspiration in the virtua_alarm and virtual_i2c
capsules.
Tock Mini Tutorials
These tutorials walk through how to use some various features of Tock. They are narrower in scope than the course, but try to explain in detail how various Tock apps work.
You will need the libtock-c repository to run these tutorials. You should
check out a copy of libtock-c by running:
$ git clone https://github.com/tock/libtock-c
libtock-c contains many example Tock applications as well as the library
support code for running C and C++ apps on Tock. If you are looking to develop
Tock applications you will likely want to start with an existing app in
libtock-c and modify it.
Setup
You need to be able to compile and load the Tock kernel and Tock applications. See the getting started guide on how to get setup.
You also need hardware that supports Tock.
The tutorials assume you have a Tock kernel loaded on your hardware board. To get a kernel installed, follow these steps.
-
Obtain the Tock Source. You can clone a copy of the Tock repository to get the kernel source:
$ git clone https://github.com/tock/tock $ cd tock -
Compile Tock. In the root of the Tock directory, compile the kernel for your hardware platform. You can find a list of boards by running
make list. For example if your board isimixthen:$ make list $ cd boards/imix $ makeIf you have another board just replace "imix" with
<your-board>This will create binaries of the Tock kernel. Tock is compiled with Cargo, a package manager for Rust applications. The first time Tock is built all of the crates must be compiled. On subsequent builds, crates that haven't changed will not have to be rebuilt and the compilation will be faster.
-
Load the Tock Kernel. The next step is to program the Tock kernel onto your hardware. To load the kernel, run:
$ make installin the board directory. Now you have the kernel loaded onto the hardware. The kernel configures the hardware and provides drivers for many hardware resources, but does not actually include any application logic. For that, we need to load an application.
Note, you only need to program the kernel once. Loading applications does not alter the kernel, and applications can be re-programed without re-programming the kernel.
With the kernel setup, you are ready to try the mini tutorials.
Tutorials
- Blink an LED: Get your first Tock app running.
- Button to Printf(): Print to terminal in response to button presses.
- BLE Advertisement Scanning: Sense nearby BLE packets.
- Sample Sensors and Use Drivers: Use syscalls to interact with kernel drivers.
- Inter-process Communication: Tock's IPC mechanism.
Board compatibility matrix
| Tutorial # | Supported boards |
|---|---|
| 1 | All |
| 2 | All with a button |
| 3 | Hail and imix |
| 4 | All with a light sensor |
| 5 | All that support IPC |
Blink: Running Your First App
This guide will help you get the blink app running on top of Tock kernel.
Instructions
-
Erase any existing applications. First, we need to remove any applications already on the board. Note that Tockloader by default will install any application in addition to whatever is already installed on the board.
$ tockloader erase-apps -
Install Blink. Tock supports an "app store" of sorts. That is, tockloader can install apps from a remote repository, including Blink. To do this:
$ tockloader install blinkYou will have to tell Tockloader that you are OK with fetching the app from the Internet.
Your specific board may require additional arguments, please see the readme in the
boards/folder for more details. -
Compile and Install Blink. We can also compile the blink app and load our compiled version. The basic C version of blink is located in the libtock-c repository.
-
Clone that repository:
$ cd tock-book $ git clone https://github.com/tock/libtock-c -
Then navigate to
examples/blink:$ cd libtock-c/examples/blink -
From there, you should be able to compile it and install it by:
$ make $ tockloader install
When the blink app is installed you should see the LEDs on the board blinking. Congratulations! You have just programmed your first Tock application.
-
Say "Hello!" On Every Button Press
This tutorial will walk you through calling printf() in response to a button
press.
-
Start a new application. A Tock application in C looks like a typical C application. Lets start with the basics:
#include <stdio.h> int main(void) { return 0; }You also need a makefile. Copying a makefile from an existing app is the easiest way to get started.
-
Setup a button callback handler. A button press in Tock is treated as an interrupt, and in an application this translates to a function being called, much like in any other event-driven system. To listen for button presses, we first need to define a callback function.
#include <stdio.h> #include <libtock/interface/button.h> // Callback for button presses. // btn_num: The index of the button associated with the callback // val: true if pressed, false if depressed static void button_callback( returncode_t ret, int btn_num, bool val) { } int main(void) { return 0; }All callbacks in the libtock are specific to the individual driver, and the values provided depend on how the individual drivers work.
-
Enable the button interrupts. By default, the interrupts for the buttons are not enabled. To enable them, we make a syscall. Buttons, like other drivers in Tock, follow the convention that applications can ask the kernel how many there are. This is done by calling
button_count().#include <stdio.h> #include <libtock/interface/button.h> // Callback for button presses. // btn_num: The index of the button associated with the callback // val: true if pressed, false if depressed static void button_callback( returncode_t ret, int btn_num, bool val) { } int main(void) { // Ensure there is a button to use. int count; libtock_button_count(&count); if (count < 1) { // There are no buttons on this platform. printf("Error! No buttons on this platform.\n"); } else { // Enable an interrupt on the first button. libtock_button_notify_on_press(0, button_callback); } // Loop forever waiting on button presses. while (1) { yield(); } }The button count is checked, and the app only continues if there exists at least one button. To enable the button interrupt,
libtock_button_notify_on_press()is called with the index of the button to use. In this example we just use the first button.We then need to wait in a loop calling
yield()to continue to receive button presses. -
Call
printf()on button press. To print a message, we callprintf()in the callback.#include <stdio.h> #include <libtock/interface/button.h> // Callback for button presses. // btn_num: The index of the button associated with the callback // val: true if pressed, false if depressed static void button_callback( __attribute__ ((unused)) returncode_t ret, __attribute__ ((unused)) int btn_num, bool val) { // Only print on the down press. if (val) { printf("Hello!\n"); } } int main(void) { // Ensure there is a button to use. int count; libtock_button_count(&count); if (count < 1) { // There are no buttons on this platform. printf("Error! No buttons on this platform.\n"); } else { // Enable an interrupt on the first button. libtock_button_notify_on_press(0, button_callback); } // Loop forever waiting on button presses. while (1) { yield(); } } -
Run the application. To try this tutorial application, you can find it in the tutorials app folder. See the first tutorial for details on how to compile and install a C application.
Once installed, when you press the button, you should see "Hello!" printed to the terminal!
Look! A Wild BLE Packet Appeared!
Note! This tutorial will only work on Hail and imix boards.
This tutorial will walk you through getting an app running that scans for BLE advertisements. Most BLE devices typically broadcast advertisements periodically (usually once a second) to allow smartphones and other devices to discover them. The advertisements typically contain the BLE device's ID and name, as well as as which services the device provides, and sometimes raw data as well.
To provide BLE connectivity, several Tock boards use the Nordic nRF51822 as a BLE co-processor. In this configuration, the nRF51822 runs all of the BLE operations and exposes a command interface over a UART bus. Luckily for us, Nordic has defined and implemented the entire interface. Better yet, they made it interoperable with their nRF51 SDK. What this means is any BLE app that would run on the nRF51822 directly can be compiled to run on a different microcontroller, and any function calls that would have interacted with the BLE hardware are instead packaged and sent to the nRF51822 co-processor. Nordic calls this tool "BLE Serialization", and Tock has a port of the serialization libraries that Tock applications can use.
So, with that introduction, lets get going.
-
Initialize the BLE co-processor. The first step a BLE serialization app must do is initialize the BLE stack on the co-processor. This can be done with Nordic's SDK, but to simplify things Tock supports the Simple BLE library. The goal of
simple_ble.cis to wrap the details of the nRF5 SDK and the intricacies of BLE in an easy-to-use library so you can get going with creating BLE devices and not learning the entire spec.#include <simple_ble.h> // Intervals for advertising and connections. // These are some basic settings for BLE devices. However, since we are // only interesting in scanning, these are not particularly relevant. simple_ble_config_t ble_config = { .platform_id = 0x00, // used as 4th octet in device BLE address .device_id = DEVICE_ID_DEFAULT, .adv_name = "Tock", .adv_interval = MSEC_TO_UNITS(500, UNIT_0_625_MS), .min_conn_interval = MSEC_TO_UNITS(1000, UNIT_1_25_MS), .max_conn_interval = MSEC_TO_UNITS(1250, UNIT_1_25_MS) }; int main () { printf("[Tutorial] BLE Scanning\n"); // Setup BLE. simple_ble_init(&ble_config); } -
Scan for advertisements. With
simple_blethis is pretty straightforward.int main () { printf("[Tutorial] BLE Scanning\n"); // Setup BLE. simple_ble_init(&ble_config); // Scan for advertisements. simple_ble_scan_start(); } -
Handle the advertisement received event. Just as the main Tock microcontroller can send commands to the nRF co-processor, the co-processor can send events back. When these occur, a variety of callbacks are generated in
simple_bleand then passed to users of the library. In this case, we only care aboutble_evt_adv_report()which is called on each advertisement reception.// Called when each advertisement is received. void ble_evt_adv_report (ble_evt_t* p_ble_evt) { ble_gap_evt_adv_report_t* adv = (ble_gap_evt_adv_report_t*) &p_ble_evt->evt.gap_evt.params.adv_report; }The
ble_evt_adv_report()function is passed a pointer to able_evt_tstruct. This is a type from the Nordic nRF51 SDK, and more information can be found in the SDK documentation. -
Display a message for each advertisement. Once we have the advertisement callback, we can use
printf()like normal.#include <stdio.h> #include <libtock/interface/led.h> // Called when each advertisement is received. void ble_evt_adv_report (ble_evt_t* p_ble_evt) { ble_gap_evt_adv_report_t* adv = (ble_gap_evt_adv_report_t*) &p_ble_evt->evt.gap_evt.params.adv_report; // Print some details about the discovered advertisement. printf("Recv Advertisement: [%02x:%02x:%02x:%02x:%02x:%02x] RSSI: %d, Len: %d\n", adv->peer_addr.addr[5], adv->peer_addr.addr[4], adv->peer_addr.addr[3], adv->peer_addr.addr[2], adv->peer_addr.addr[1], adv->peer_addr.addr[0], adv->rssi, adv->dlen); // Also toggle the first LED. libtock_led_toggle(0); } -
Handle some BLE annoyances. The last step to getting a working app is to handle some annoyances using BLE serialization with the
simple_blelibrary. Typically errors generated by the nRF51 SDK are severe and mean there is a significant bug in the code. With serialization, however, messages between the two processors can be corrupted or misframed, causing parsing errors. We can ignore these errors safely and just drop the corrupted packet.Additionally, the
simple_blelibrary makes it easy to set the address of a BLE device. However, this functionality only works when running on an actual nRF51822. To disable this, we override the weakly definedble_address_set()function with an empty function.void app_error_fault_handler(uint32_t error_code, uint32_t line_num, uint32_t info) { } void ble_address_set () { } -
Run the app and see the packets! To try this tutorial application, you can find it in the tutorials app folder.
For any new applications, ensure that the following is in the makefile so that the BLE serialization library is included.
EXTERN_LIBS += $(TOCK_USERLAND_BASE_DIR)/libnrfserialization
Details
This section contains a few notes about the specific versions of BLE serialization used.
Tock currently supports the S130 softdevice version 2.0.0 and SDK 11.0.0.
Reading Sensors From Scratch
Note! This tutorial will only work on boards with a light sensor.
In this tutorial we will cover how to use the syscall interface from applications to kernel drivers, and guide things based on reading a light sensor and printing the readings over UART.
Note: This example demonstrates using the low-level system call interface directly to read a sensor. In general, we would not write applications this way. However, this tutorial serves as an illustrative guide for learning more about the Tock system call interface. See the fourth step for the conventional approach.
OK, lets get started.
-
Setup a generic app for handling asynchronous events. As with most sensors, the light sensor is read asynchronously, and a callback is generated from the kernel to userspace when the reading is ready. Therefore, to use this sensor, our application needs to do two things: 1) setup a callback the kernel driver can call when the reading is ready, and 2) instruct the kernel driver to start the measurement. Lets first sketch this out:
#include <libtock/tock.h> #define DRIVER_NUM 0x60002 // Callback when the light sensor has a light intensity measurement ready. static void light_callback(int intensity, int unused1, int unused2, void* ud) { } int main() { // Tell the kernel about the callback. // Instruct the light sensor driver to begin a reading. // Wait until the reading is complete. // Print the resulting value. return 0; } -
Fill in the application with syscalls. The standard Tock syscalls can be used to actually implement the sketch we made above. We first use the
subscribesyscall to inform the kernel about the callback in our application. We then use thecommandsyscall to start the measurement. To wait, we use theyieldcall to wait for the callback to actually fire. We do not need to useallowfor this application, and typically it is not required for reading sensors.For all syscalls that interact with drivers, the major number is set by the platform. In the case of the light sensor, it is
0x60002. The minor numbers are set by the driver and are specific to the particular driver.To save the value from the callback to use in the print statement, we will store it in a global variable.
#include <stdio.h> #include <libtock/tock.h> #define DRIVER_NUM 0x60002 static int sensor_reading; // Callback when the light sensor has a light intensity measurement ready. static void light_callback(int intensity, int unused1, int unused2, void* ud) { // Save the reading when the callback fires. sensor_reading = intensity; } int main() { // Tell the kernel about the callback. subscribe(DRIVER_NUM, 0, light_callback, NULL); // Instruct the light sensor driver to begin a reading. command(DRIVER_NUM, 1, 0, 0); // Wait until the reading is complete. yield(); // Print the resulting value. printf("Light sensor reading: %d\n", sensor_reading); return 0; } -
Be smarter about waiting for the callback. While the above application works, it's really relying on the fact that we are only sampling a single sensor. In the current setup, if instead we had two sensors with outstanding commands, the first callback that fired would trigger the
yield()call to return and then theprintf()would execute. If, for example, sampling the light sensor takes 100 ms, and the new sensor only needs 10 ms, the new sensor's callback would fire first and theprintf()would execute with an incorrect value.To handle this, we can instead use the
yield_for()call, which takes a flag and only returns when that flag has been set. We can then set this flag in the callback to make sure that ourprintf()only occurs when the light reading has completed.#include <stdio.h> #include <stdbool.h> #include <libtock/tock.h> #define DRIVER_NUM 0x60002 static int sensor_reading; static bool sensor_done = false; // Callback when the light sensor has a light intensity measurement ready. static void light_callback(int intensity, int unused1, int unused2, void* ud) { // Save the reading when the callback fires. sensor_reading = intensity; // Mark our flag true so that the `yield_for()` returns. sensor_done = true; } int main() { // Tell the kernel about the callback. subscribe(DRIVER_NUM, 0, light_callback, NULL); // Instruct the light sensor driver to begin a reading. command(DRIVER_NUM, 1, 0, 0); // Wait until the reading is complete. yield_for(&sensor_done); // Print the resulting value. printf("Light sensor reading: %d\n", sensor_reading); return 0; } -
Use the
libtocklibrary functions. Normally, applications don't use the barecommandandsubscribesyscalls. Typically, these are wrapped together into helpful commands inside oflibtockandlibtock-syncand come with a function that hides theyield_for()to a make a synchronous function which is useful for developing applications quickly. Lets port the light sensing app to use the Tock Standard Library:#include <stdio.h> #include <libtock-sync/sensors/ambient_light.h> int main() { // Take the light sensor measurement synchronously. int sensor_reading; libtocksync_ambient_light_read_intensity(&sensor_reading); // Print the resulting value. printf("Light sensor reading: %d\n", sensor_reading); return 0; } -
Explore more sensors. This tutorial highlights only one sensor. See the sensors app for a more complete sensing application.
Friendly Apps Share Data
This tutorial covers how to use Tock's IPC mechanism to allow applications to communicate and share memory.
Tock IPC Basics
IPC in Tock uses a client-server model. Applications can provide a service by telling the Tock kernel that they provide a service. Each application can only provide a single service, and that service's name is set to the name of the application. Other applications can then discover that service and explicitly share a buffer with the server. Once a client shares a buffer, it can then notify the server to instruct the server to somehow interact with the shared buffer. The protocol for what the server should do with the buffer is service specific and not specified by Tock. Servers can also notify clients, but when and why servers notify clients is service specific.
Example Application
To provide an overview of IPC, we will build an example system consisting of three apps: a random number service, a LED control service, and a main application that uses the two services. While simple, this example both demonstrates the core aspects of the IPC mechanism and should run on any hardware platform.
LED Service
Lets start with the LED service. The goal of this service is to allow other applications to use the shared buffer as a command message to instruct the LED service on how to turn on or off the system's LEDs.
-
We must tell the kernel that our app wishes to provide a service. All that we have to do is call
ipc_register_svc().#include "ipc.h" int main(void) { ipc_register_svc(ipc_callback, NULL); return 0; } -
We also need that callback (
ipc_callback) to handle IPC requests from other applications. This callback will be called when the client app notifies the service.static void ipc_callback(int pid, int len, int buf, void* ud) { // pid: An identifier for the app that notified us. // len: How long the buffer is that the client shared with us. // buf: Pointer to the shared buffer. } -
Now lets fill in the callback for the LED application. This is a simplified version for illustration. The full example can be found in the
examples/tutorialsfolder.#include <tock/interface/led.h> static void ipc_callback(int pid, int len, int buf, void* ud) { uint8_t* buffer = (uint8_t*) buf; // First byte is the command, second byte is the LED index to set, // and the third byte is whether the LED should be on or off. uint8_t command = buffer[0]; if (command == 1) { uint8_t led_id = buffer[1]; uint8_t led_state = buffer[2] > 0; if (led_state == 0) { libtock_led_off(led_id); } else { libtock_led_on(led_id); } // Tell the client that we have finished setting the specified LED. ipc_notify_client(pid); break; } }
RNG Service
The RNG service returns the requested number of random bytes in the shared folder.
-
Again, register that this service exists.
int main(void) { ipc_register_svc(ipc_callback, NULL); return 0; } -
Also need a callback function for when the client signals the service. The client specifies how many random bytes it wants by setting the first byte of the shared buffer before calling notify.
#include <libtock-sync/peripherals/rng.h> static void ipc_callback(int pid, int len, int buf, void* ud) { uint8_t* buffer = (uint8_t*) buf; uint8_t rng[len]; uint8_t number_of_bytes = buffer[0]; // Fill the buffer with random bytes. int number_of_bytes_received; libtocksync_rng_get_random_bytes(rng, len, number_of_bytes, &number_of_bytes_received); memcpy(buffer, rng, number_of_bytes_received); // Signal the client that we have the number of random bytes requested. ipc_notify_client(pid); }This is again not a complete example but illustrates the key aspects.
Main Logic Client Application
The third application uses the two services to randomly control the LEDs on the board. This application is not a server but instead is a client of the two service applications.
-
When using an IPC service, the first step is to discover the service and record its identifier. This will allow the application to share memory with it and notify it. Services are discovered by the name of the application that provides them. Currently these are set in the application Makefile or by default based on the folder name of the application. The examples in Tock commonly use a Java style naming format.
int main(void) { int led_service = ipc_discover("org.tockos.tutorials.ipc.led"); int rng_service = ipc_discover("org.tockos.tutorials.ipc.rng"); return 0; }If the services requested are valid and exist the return value from
ipc_discoveris the identifier of the found service. If the service cannot be found an error is returned. -
Next we must share a buffer with each service (the buffer is the only way to share between processes), and setup a callback that is called when the server notifies us as a client. Once shared, the kernel will permit both applications to read/modify that memory.
char led_buf[64] __attribute__((aligned(64))); char rng_buf[64] __attribute__((aligned(64))); int main(void) { int led_service = ipc_discover("org.tockos.tutorials.ipc.led"); int rng_service = ipc_discover("org.tockos.tutorials.ipc.rng"); // Setup IPC for LED service ipc_register_client_cb(led_service, ipc_callback, NULL); ipc_share(led_service, led_buf, 64); // Setup IPC for RNG service ipc_register_client_cb(rng_service, ipc_callback, NULL); ipc_share(rng_service, rng_buf, 64); return 0; } -
We of course need the callback too. For this app we use the
yield_for()function to implement the logical synchronously, so all the callback needs to do is set a flag to signal the end of theyield_for().bool done = false; static void ipc_callback(int pid, int len, int arg2, void* ud) { done = true; } -
Now we use the two services to implement our application.
#include <timer.h> void app() { while (1) { // Get two random bytes from the RNG service done = false; rng_buf[0] = 2; // Request two bytes. ipc_notify_svc(rng_service); yield_for(&done); // Control the LEDs based on those two bytes. done = false; led_buf[0] = 1; // Control LED command. led_buf[1] = rng_buf[0] % NUM_LEDS; // Choose the LED index. led_buf[2] = rng_buf[1] & 0x01; // On or off. ipc_notify_svc(led_service); // Notify to signal LED service. yield_for(&done); delay_ms(500); } }
Try It Out
To test this out, see the complete apps in the IPC tutorial example folder.
To install all of the apps on a board:
$ cd examples/tutorials/05_ipc
$ tockloader erase-apps
$ pushd led && make && tockloader install && popd
$ pushd rng && make && tockloader install && popd
$ pushd logic && make && tockloader install && popd
You should see the LEDs randomly turning on and off!
Kernel Development Guides
These guides provide walkthroughs for specific kernel development tasks. For example, there is a guide on how to add a new syscall interface for userspace applications. The guides are intended to be general and provide high-level instructions which will have to be adapted for the specific functionality to be added.
Overtime, these guides will inevitably become out-of-date in that the specific code examples will fail to compile. However, the general design aspects and considerations should still be relevant even if the specific code details have changed. You are encourage to use these guides as just that, a general guide, and to copy from up-to-date examples contained in the Tock repository.
List of Guides:
- Chip Peripheral Driver
- Sensor Driver
- System Call Interface
- HIL
- Virtualizers
- Kernel Tests
- Component
- Optimize Code Size
- Porting Tock
- Porting From 1.x to 2.x
- VSCode Debugging
Implementing a Chip Peripheral Driver
This guide covers how to implement a peripheral driver for a particular microcontroller (MCU). For example, if you wanted to add an analog to digital converter (ADC) driver for the Nordic nRF52840 MCU, you would follow the general steps described in this guide.
Overview
The general steps you will follow are:
- Determine the HIL you will implement.
- Create a register mapping for the peripheral.
- Create a struct for the peripheral.
- Implement the HIL interface for the peripheral.
- Create the peripheral driver object and cast the registers to the correct memory location.
The guide will walk through how to do each of these steps.
Background
Implementing a chip peripheral driver increases Tock's support for a particular microcontroller and allows capsules and userspace apps to take more advantage of the hardware provided by the MCU. Peripheral drivers for an MCU are generally implemented on an as-needed basis to support a particular use case, and as such the chips in Tock generally do not have all of the peripheral drivers implemented already.
Peripheral drivers are included in Tock as "trusted code" in the kernel. This
means that they can use the unsafe keyword (in fact, they must). However, it
also means more care must be taken to ensure they are correct. The use of
unsafe should be kept to an absolute minimum and only used where absolutely
necessary. This guide explains the one use of unsafe that is required. All
other uses of unsafe in a peripheral driver will likely be very scrutinized
during the pull request review period.
Step-by-Step Guide
The steps from the overview are elaborated on here.
-
Determine the HIL you will implement.
The HILs in Tock are the contract between the MCU-specific hardware and the more generic capsules which use the hardware resources. They provide a common interface that is consistent between different microcontrollers, enabling code higher in the stack to use the interfaces without needing to know any details about the underlying hardware. This common interface also allows the same higher-level code to be portable across different microcontrollers. HILs are implemented as traits in Rust.
All HILs are defined in the
kernel/src/hildirectory. You should find a HIL that exposes the interface the peripheral you are writing a driver for can provide. There should only be one HIL that matches your peripheral.Note: As of Dec 2019, the
hildirectory also contains interfaces that are only provided by capsules for other capsules. For example, the ambient light HIL interface is likely not something an MCU would implement.It is possible Tock does not currently include a HIL that matches the peripheral you are implementing a driver for. In that case you will also need to create a HIL, which is explained in a different development guide.
Checkpoint: You have identified the HIL your driver will implement.
-
Create a register mapping for the peripheral.
To start implementing the peripheral driver, you must create a new source file within the MCU-specific directory inside of
chips/srcdirectory. The name of this file generally should match the name of the peripheral in the the MCU's datasheet.Include the name of this file inside of the
lib.rs(or potentiallymod.rs) file inside the same directory. This should look like:#![allow(unused)] fn main() { pub mod ast; }Inside of the new file, you will first need to define the memory-mapped input/output (MMIO) registers that correspond to the peripheral. Different embedded code ecosystems have devised different methods for doing this, and Tock is no different. Tock has a special library and set of Rust macros to make defining the register map straightforward and using the registers intuitive.
The full register library is here, but to get started, you will first create a structure like this:
#![allow(unused)] fn main() { use tock_registers::registers::{ReadOnly, ReadWrite, WriteOnly}; register_structs! { XyzPeripheralRegisters { /// Control register. /// The 'Control' parameter constrains this register to only use /// fields from a certain group (defined below in the bitfields /// section). (0x000 => cr: ReadWrite<u32, Control::Register>), // Status register. (0x004 => s: ReadOnly<u8, Status::Register>), /// spacing between registers in memory (0x008 => _reserved), /// Another register with no meaningful fields. (0x014 => word: ReadWrite<u32>), // Etc. // The end of the struct is marked as follows. (0x100 => @END), } } }You should replace
XyzPeripheralwith the name of the peripheral you are writing a driver for. Then, for each register defined in the datasheet, you must specify an entry in the macro. For example, a register is defined like:#![allow(unused)] fn main() { (0x000 => cr: ReadWrite<u32, Control::Register>), }where:
0x000is the offset (in bytes) of the register from the beginning of the register map.cris the name of the register in the datasheet.ReadWriteis the access control of the register as defined in the datasheet.u32is the size of the register.Control::Registermaps to the actual bitfields used in the register. You will create this type for this particular peripheral, so you can name this whatever makes sense at this point. Note that it will always end with::Registerdue to how Rust macros work. If it doesn't make sense to define the specific bitfields in this register, you can omit this field. For example, an esoteric field in the register map that the implementation does not use likely does not need its bitfields mapped.
Once the register map is defined, you must specify the bitfields for any registers that you gave a specific type to. This looks like the following:
#![allow(unused)] fn main() { register_bitfields! [ // First parameter is the register width for the bitfields. Can be u8, // u16, u32, or u64. u32, // Each subsequent parameter is a register abbreviation, its descriptive // name, and its associated bitfields. The descriptive name defines this // 'group' of bitfields. Only registers defined as // ReadWrite<_, Control::Register> can use these bitfields. Control [ // Bitfields are defined as: // name OFFSET(shift) NUMBITS(num) [ /* optional values */ ] // This is a two-bit field which includes bits 4 and 5 RANGE OFFSET(4) NUMBITS(3) [ // Each of these defines a name for a value that the bitfield // can be written with or matched against. Note that this set is // not exclusive--the field can still be written with arbitrary // constants. VeryHigh = 0, High = 1, Low = 2 ], // A common case is single-bit bitfields, which usually just mean // 'enable' or 'disable' something. EN OFFSET(3) NUMBITS(1) [], INT OFFSET(2) NUMBITS(1) [] ], // Another example: // Status register Status [ TXCOMPLETE OFFSET(0) NUMBITS(1) [], TXINTERRUPT OFFSET(1) NUMBITS(1) [], RXCOMPLETE OFFSET(2) NUMBITS(1) [], RXINTERRUPT OFFSET(3) NUMBITS(1) [], MODE OFFSET(4) NUMBITS(3) [ FullDuplex = 0, HalfDuplex = 1, Loopback = 2, Disabled = 3 ], ERRORCOUNT OFFSET(6) NUMBITS(3) [] ], ] }The name in each entry of the
register_bitfields! []list must match the register type provided in the register map declaration. Each register that is used in the driver implementation should have its bitfields declared.Checkpoint: The register map is correctly described in the driver source file.
-
Create a struct for the peripheral.
Each peripheral driver is implemented with a struct which is later used to create an object that can be passed to code that will use this peripheral driver. The actual fields of the struct are very peripheral specific, but should contain any state that the driver needs to correctly function.
An example struct looks for a timer peripheral called the AST by the MCU datasheet looks like:
#![allow(unused)] fn main() { pub struct Ast<'a> { registers: StaticRef<AstRegisters>, callback: OptionalCell<&'a dyn hil::time::AlarmClient>, } }The struct should contain a reference to the registers defined above (we will explain the
StaticReflater). Typically, many drivers respond to certain events (like in this case a timer firing) and therefore need a reference to a client to notify when that event occurs. Notice that the type of the callback handler is specified in the HIL interface.Peripheral structs typically need a lifetime for references like the callback client reference. By convention Tock peripheral structs use
'afor this lifetime, and you likely want to copy that as well.Think of what state your driver might need to keep around. This could include a direct memory access (DMA) reference, some configuration flags like the baud rate, or buffer indices. See other Tock peripheral drivers for more examples.
Note: you will most likely need to update this struct as you implement the driver, so to start with this just has to be a best guess.
Hint: you should avoid keeping any state in the peripheral driver struct that is already stored by the hardware itself. For example, if there is an "enabled" bit in a register, then you do not need an "enabled" flag in the struct. Replicating this state leads to bugs when those values get out of sync, and makes it difficult to update the driver in the future.
Peripheral driver structs make extensive use of different "cell" types to hold references to various shared state. The general wisdom is that if the value will ever need to be updated, then it needs to be contained in a cell. See the Tock cell documentation for more details on the cell types and when to use which one. In this example, the callback is stored in an
OptionalCell, which can contain a value or not (if the callback is not set), and can be updated if the callback needs to change.With the struct defined, you should next create a
new()function for that struct. This will look like:#![allow(unused)] fn main() { impl Ast { const fn new(registers: StaticRef<AstRegisters>) -> Ast { Ast { registers: registers, callback: OptionalCell::empty(), } } } }Checkpoint: There is a struct for the peripheral that can be created.
-
Implement the HIL interface for the peripheral.
With the peripheral driver struct created, now the main work begins. You can now write the actual logic for the peripheral driver that implements the HIL interface you identified earlier. Implementing the HIL interface is done just like implementing a trait in Rust. For example, to implement the
TimeHIL for the AST:#![allow(unused)] fn main() { impl hil::time::Time for Ast<'a> { type Frequency = Freq16KHz; fn now(&self) -> u32 { self.get_counter() } fn max_tics(&self) -> u32 { core::u32::MAX } } }You should include all of the functions from the HIL and decide how to implement them.
Some operations will be shared among multiple HIL functions. These should be implemented as functions for the original struct. For example, in the
Astexample the HIL functionnow()uses theget_counter()function. This should be implemented on the mainAststruct:#![allow(unused)] fn main() { impl Ast { const fn new(registers: StaticRef<AstRegisters>) -> Ast { Ast { registers: registers, callback: OptionalCell::empty(), } } fn get_counter(&self) -> u32 { let regs = &*self.registers; while self.busy() {} regs.cv.read(Value::VALUE) } } }Note the
get_counter()function also illustrates how to use the register reference and the Tock register library. The register library includes much more detail on the various register operations enabled by the library.Checkpoint: All of the functions in the HIL interface have MCU peripheral-specific implementations.
-
Create the peripheral driver object and cast the registers to the correct memory location.
The last step is to actually create the object so that the peripheral driver can be used by other code. Start by casting the register map to the correct memory address where the registers are actually mapped to. For example:
#![allow(unused)] fn main() { use kernel::common::StaticRef; const AST_BASE: StaticRef<AstRegisters> = unsafe { StaticRef::new(0x400F0800 as *const AstRegisters) }; }StaticRefis a type in Tock designed explicitly for this operation of casting register maps to the correct location in memory. The0x400F0800is the address in memory of the start of the registers and this location will be specified by the datasheet.Note that creating the
StaticRefrequires using theunsafekeyword. This is because doing this cast is a fundamentally memory-unsafe operation: this allows whatever is at that address in memory to be accessed through the register interface (which is exposed as a safe interface). In the normal case where the correct memory address is provided there is no concern for system safety as the register interface faithfully represents the underlying hardware. However, suppose an incorrect address was used, and that address actually points to live memory used by the Tock kernel. Now kernel data structures could be altered through the register interface, and this would violate memory safety.With the address reference created, we can now create the actual driver object:
#![allow(unused)] fn main() { pub static mut AST: Ast = Ast::new(AST_BASE); }This object will be used by a board's main.rs file to pass, in this case, the driver for the timer hardware to various capsules and other code that needs the underlying timer hardware.
Wrap-Up
Congratulations! You have implemented a peripheral driver for a microcontroller in Tock! We encourage you to submit a pull request to upstream this to the Tock repository.
Implementing a Sensor Driver
This guide describes the steps necessary to implement a capsule in Tock that interfaces with an external IC, like a sensor, memory chip, or display. These are devices which are not part of the same chip as the main microcontroller (MCU), but are on the same board and connected via some physical connection.
Note: to attempt to be generic, this guide will use the term "IC" to refer to the device the driver is for.
Note: "driver" is a bit of an overloaded term in Tock. In this guide, "driver" is used in the generic sense to mean code that interfaces with the external IC.
To illustrate the steps, this guide will use a generic light sensor as the running example. You will need to adapt the generic steps for your particular use case.
Often the goal of an IC driver is to expose an interface to that sensor or other IC to userspace applications. This guide does not cover creating that userspace interface as that is covered in a different guide.
Background
As mentioned, this guide describes creating a capsule. Capsules in Tock are
units of Rust code that extend the kernel to add interesting features, like
interfacing with new sensors. Capsules are "untrusted", meaning they cannot call
unsafe code in Rust and cannot use the unsafe keyword.
Overview
The high-level steps required are:
- Create a struct for the IC driver.
- Implement the logic to interface with the IC.
Optional:
- Provide a HIL interface for the IC driver.
- Provide a userspace interface for the IC driver.
Step-by-Step Guide
The steps from the overview are elaborated on here.
-
Create a struct for the IC driver.
The driver will be implemented as a capsule, so the first step is to create a new file in the
capsules/srcdirectory. The name of this file should be[chipname].rswhere[chipname]is the part number of the IC you are writing the driver for. There are several other examples in the capsules folder.For our example we will assume the part number is
ls1234.You then need to add the filename to
capsules/src/lib.rslike:#![allow(unused)] fn main() { pub mod ls1234; }Now inside of the new file you should create a struct with the fields necessary to implement the driver for the IC. In our example we will assume the IC is connected to the MCU with an I2C bus. Your IC might use SPI, UART, or some other standard interface. You will need to adjust how you create the struct based on the interface. You should be able to find examples in the capsules directory to copy from.
The struct will look something like:
#![allow(unused)] fn main() { pub struct Ls1234 { i2c: &'a dyn I2CDevice, state: Cell<State>, buffer: TakeCell<'static, [u8]>, client: OptionalCell<&'a dyn Ls1234Client>, } }You can see the resources this driver requires to successfully interface with the light sensor:
-
i2c: This is a reference to the I2C bus that the driver will use to communicate with the IC. Notice in Tock the type isI2CDevice, and no address is provided. This is because theI2CDevicetype wraps the address in internally, so that the driver code can only communicate with the correct address. -
state: Often drivers will iterate through various states as they communicate with the IC, and it is common for drivers to keep some state variable to manage this. OurStateis defined as an enum, like so:#![allow(unused)] fn main() { #[derive(Copy, Clone, PartialEq)] enum State { Disabled, Enabling, ReadingLight, } }Also note that the
statevariable uses aCell. This is so that the driver can update the state. -
buffer: This holds a reference to a buffer of memory the driver will use to send messages over the I2C bus. By convention, these buffers are defined statically in the same file as the driver, but then passed to the driver when the board boots. This provides the board flexibility on the buffer to use, while still allowing the driver to hint at the size required for successful operation. In our case the static buffer is defined as:#![allow(unused)] fn main() { pub static mut BUF: [u8; 3] = [0; 3]; }Note the buffer is wrapped in a
TakeCellsuch that it can be passed to the I2C hardware when necessary, and re-stored in the driver struct when the I2C code returns the buffer. -
client: This is the callback that will be called after the driver has received a reading from the sensor. All execution is event-based in Tock, so the caller will not block waiting for a sample, but instead will expect a callback via the client when the same is ready. The driver has to define the type of the callback by defining theLs1234Clienttrait in this case:#![allow(unused)] fn main() { pub trait Ls1234Client { fn callback(light_reading: usize); } }Note that the client is stored in an
OptionalCell. This allows the callback to not be set initially, and configured at bootup.
Your driver may require other state to be stored as well. You can update this struct as needed to for state required to successfully implement the driver. Note that if the state needs to be updated at runtime it will need to be stored in a cell type. See the cell documentation for more information on the various cell types in Tock.
Note: your driver should not keep any state in the struct that is also stored by the hardware. This easily leads to bugs when that state becomes out of sync, and makes further development on the driver difficult.
The last step is to write a function that enables creating an instance of your driver. By convention, the function is called
new()and looks something like:#![allow(unused)] fn main() { impl Ls1234<'a> { pub fn new(i2c: &'a dyn I2CDevice, buffer: &'static mut [u8]) -> Ls1234<'a> { Ls1234 { i2c: i2c, alarm: alarm, state: Cell::new(State::Disabled), client: OptionalCell::empty(), } } } }This function will get called by the board's
main.rsfile when the driver is instantiated. All of the static objects or configuration that the driver requires must be passed in here. In this example, a reference to the I2C device and the static buffer for passing messages must be provided.Checkpoint: You have defined the struct which will become the driver for the IC.
-
-
Implement the logic to interface with the IC.
Now, you will actually write the code that interfaces with the IC. This requires extending the
implof the driver struct with additional functions appropriate for your particular IC.With our light sensor example, we likely want to write a sample function for reading a light sensor value:
#![allow(unused)] fn main() { impl Ls1234<'a> { pub fn new(...) -> Ls1234<'a> {...} pub fn start_light_reading(&self) {...} } }Note that the function name is "start light reading", which is appropriate because of the event-driven, non-blocking nature of the Tock kernel. Actually communicating with the sensor will take some time, and likely requires multiple messages to be sent to and received from the sensor. Therefore, our sample function will not be able to return the result directly. Instead, the reading will be provided in the callback function described earlier.
The start reading function will likely prepare the message buffer in a way that is IC-specific, then send the command to the IC. A rough example of that operation looks like:
#![allow(unused)] fn main() { impl Ls1234<'a> { pub fn new(...) -> Ls1234<'a> {...} pub fn start_light_reading(&self) { if self.state.get() == State::Disabled { self.buffer.take().map(|buf| { self.i2c.enable(); // Set the first byte of the buffer to the "on" command. // This is IC-specific and will be described in the IC // datasheet. buf[0] = 0b10100000; // Send the command to the chip and update our state // variable. self.i2c.write(buf, 1); self.state.set(State::Enabling); }); } } } }The
start_light_reading()function kicks off reading the light value from the IC and updates our internal state machine state to mark that we are waiting for the IC to turn on. Now theLs1234code is finished for the time being and we now wait for the I2C message to finish being sent. We will know when this has completed based on a callback from the I2C hardware.#![allow(unused)] fn main() { impl I2CClient for Ls1234<'a> { fn command_complete(&self, buffer: &'static mut [u8], error: Error) { // Handle what happens with the I2C send is complete here. } } }In our example, we have to send a new command after turning on the light sensor to actually read a sampled value. We use our state machine here to organize the code as in this example:
#![allow(unused)] fn main() { impl I2CClient for Ls1234<'a> { fn command_complete(&self, buffer: &'static mut [u8], _error: Error) { match self.state.get() { State::Enabling => { // Put the read command in the buffer and send it back to // the sensor. buffer[0] = 0b10100001; self.i2c.write_read(buf, 1, 2); // Update our state machine state. self.state.set(State::ReadingLight); } _ => {} } } } }This will send another command to the sensor to read the actual light measurement. We also update our
self.statevariable because when this I2C transaction finishes the exact samecommand_completecallback will be called, and we must be able to remember where we are in the process of communicating with the sensor.When the read finishes, the
command_complete()callback will fire again, and we must handle the result. Since we now have the reading we can call our client's callback after updating out state machine.#![allow(unused)] fn main() { impl I2CClient for Ls1234<'a> { fn command_complete(&self, buffer: &'static mut [u8], _error: Error) { match self.state.get() { State::Enabling => { // Put the read command in the buffer and send it back to // the sensor. buffer[0] = 0b10100001; self.i2c.write_read(buf, 1, 2); // Update our state machine state. self.state.set(State::ReadingLight); } State::ReadingLight => { // Extract the light reading value. let mut reading: u16 = buffer[0] as 16; reading |= (buffer[1] as u16) << 8; // Update our state machine state. self.state.set(State::Disabled); // Trigger our callback with the result. self.client.map(|client| client.callback(reading)); } _ => {} } } } }Note: likely the sensor would need to be disabled and returned to a low power state.
At this point your driver can read the IC and return the information from the IC. For your IC you will likely need to expand on this general template. You can add additional functions to the main struct implementation, and then expand the state machine to implement those functions. You may also need additional resources, like GPIO pins or timer alarms to implement the state machine for the IC. There are examples in the
capsules/srcfolder with drivers that need different resources.
Optional Steps
-
Provide a HIL interface for the IC driver.
The driver so far has a very IC-specific interface. That is, any code that uses the driver must be written specifically with that IC in mind. In some cases that may be reasonable, for example if the IC is very unusual or has a very unique set of features. However, many ICs provide similar functionality, and higher-level code can be written without knowing what specific IC is being used on a particular hardware platform.
To enable this, some IC types have HILs in the
kernel/src/hilfolder in thesensors.rsfile. Drivers can implement one of these HILs and then higher-level code can use the HIL interface rather than a specific IC.To implement the HIL, you must implement the HIL trait functions:
#![allow(unused)] fn main() { impl AmbientLight for Ls1234<'a> { fn set_client(&self, client: &'static dyn AmbientLightClient) { } fn read_light_intensity(&self) -> ReturnCode { } } }The user of the
AmbientLightHIL will implement theAmbientLightClientand provide the client through theset_client()function. -
Provide a userspace interface for the IC driver.
Sometimes the IC is needed by userspace, and therefore needs a syscall interface so that userspace applications can use the IC. Please refer to a separate guide on how to implement a userspace interface for a capsule.
Wrap-Up
Congratulations! You have implemented an IC driver as a capsule in Tock! We encourage you to submit a pull request to upstream this to the Tock repository. Tock is happy to accept capsule drivers even if no boards in the Tock repository currently use the driver.
Implementing a System Call Interface for Userspace
This guide provides an overview and walkthrough on how to add a system call interface for userspace applications in Tock. The system call interface exposes some kernel functionality to applications. For example, this could be the ability to sample a new sensor, or use some service like doing AES encryption.
In this guide we will use a running example of providing a userspace interface for a hypothetical water level sensor (the "WS00123" water level sensor). This interface will allow applications to query the current water level, as well as get notified when the water level exceeds a certain threshold.
Setup
This guide assumes you already have existing kernel code that needs a userspace interface. Likely that means there is already a capsule implemented. Please see the other guides if you also need to implement the capsule.
We will assume there is a struct WS00123 {...} object already implemented that
includes all of the logic needed to interface with this particular water sensor.
Overview
The high-level steps required are:
- Decide on the interface to expose to userspace.
- Map the interface to the existing syscalls in Tock.
- Create grant space for the application.
- Implement the
SyscallDrivertrait. - Document the interface.
- Expose the interface to userspace.
- Implement the syscall library in userspace.
Step-by-Step Guide
The steps from the overview are elaborated on here.
-
Decide on the interface to expose to userspace.
Creating the interface for userspace means making design decisions on how applications should be able to interface with the kernel capsule. This can have a lasting impact, and is worth spending some time on up-front to avoid implementing an interface that is difficult to use or does not match the needs of applications.
While there is not a fixed algorithm on how to create such an interface, there are a couple tips that can help with creating the interface:
- Consider the interface for the same or similar functionality in other systems (e.g. Linux, Contiki, TinyOS, RIOT, etc.). These may have iterated on the design and include useful features.
- Ignore the specific details of the capsule that exists or how the particular sensor the syscall interface is for works, and instead consider what a user of that capsule might want. That is, if you were writing an application, how would you expect to use the interface? This might be different from how the sensor or other hardware exposes features.
- Consider other chips that provide similar functionality to the specific one you have. For example, imagine there is a competing water level sensor the "OWlS789". What features do both provide? How would a single interface be usable if a hardware board swapped one out for the other?
The interface should include both actions (called "commands" in Tock) that the application can take (for example, "sample this sensor now"), as well as events (called subscribe upcalls in Tock) that the kernel can trigger inside of an application (for example, when the sensed value is ready).
The interface can also include memory sharing between the application and the kernel. For example, if the application wants to receive a number of samples at once, or if the kernel needs to operate on many bytes (say for example encrypting a buffer), then the interface should allow the application to share some of its memory with the kernel to enable that functionality.
-
Map the interface to the existing syscalls in Tock.
With a sketch of the interface created, the next step is to map that interface to the specific syscalls that the Tock kernel supports. Tock has four main relevant syscall operations that applications can use when interfacing with the kernel:
-
allow_readwrite: This lets an application share some of its memory with the kernel, which the kernel can read or write to. -
allow_readonly: This lets an application share some of its memory with the kernel, which the kernel can only read. -
subscribe: This provides a function pointer that the kernel can use to invoke an upcall on the application. -
command: This enables the application to direct the kernel to take some action.
All four also include a couple other parameters to differentiate different commands, subscriptions, or allows. Refer to the more detailed documentation on the Tock syscalls for more information.
As the Tock kernel only supports these syscalls, each feature in the design you created in the first step must be mapped to one or more of them. To help, consider these hypothetical interfaces that an application might have for our water sensor:
- What is the maximum water level? This can be a simple command, where the return value of the command is the maximum water level.
- What is the current water level? This will require two steps. First, there needs to be a subscribe call where the application can setup an upcall function. The kernel will call this when the water level value has been acquired. Second, there will need to be a command to instruct the kernel to take the water level reading.
- Take ten water level samples. This will require three steps. First, the application must use a readwrite allow syscall to share a buffer with the kernel large enough to hold 10 water level readings. Then it must setup a subscribe upcall that the kernel will call when the 10 readings are ready (note this upcall function can be the same as in the single sample case). Finally it will use a command to tell the kernel to start sampling.
- Notify me when the water level exceeds a threshold. A likely way to implement this would be to first require a subscribe syscall for the application to set the function that will get called when the high water level event occurs. Then the application will need to use a command to enable the high water level detection and to optionally set the threshold.
As you do this, remember that kernel operations, and the above system calls, cannot execute for a long period of time. All of the four system calls are non-blocking. Long-running operations should involve an application starting the operation with a command, then having the kernel signal completion with an upcall.
Checkpoint: You have defined how many allow, subscribe, and command syscalls you need, and what each will do.
-
-
Create grant space for the application.
Grants are regions in a process's memory space that are shared with the kernel. The kernel uses these to store state on behalf of the process. To provide our syscall interface for the water level sensor, we need to setup a grant so that we can store state for all of the requests we may get from processes that want to use the sensor.
The first step to do this is to create a struct that contains fields for all of the state we want to store for each process that uses our syscall interface. By convention in Tock, this struct is named
App, but it could have a different name.In our grant we need to store two things: the high water alert threshold and the upcall function pointer the app provided us when it called subscribe. We, however, only have to handle the threshold. As of Tock 2.0, the upcall is stored internally in the kernel. All we have to do is tell the kernel how many different upcall function pointers per app we need to store. In our case we only need to store one. This is provided as a parameter to
Grant.We can now create an
Appstruct which represents what will be stored in our grant:#![allow(unused)] fn main() { pub struct App { threshold: usize, } }Now that we have the type we want to store in the grant region we can create the grant type for it by extending our
WS00123struct:#![allow(unused)] fn main() { pub struct WS00123 { ... apps: Grant<App, 1>, } }Grant<App, 1>tells the kernel that we want to store the App struct in the grant, as well as one upcall function pointer.We will also need the grant region to be created by the board and passed in to us by adding it to the capsules
new()function:#![allow(unused)] fn main() { impl WS00123 { pub fn new( ... grant: Grant<App, 1>, ) -> WS00123 { WS00123 { ..., apps: grant, } } } }Now we have somewhere to store values on a per-process basis.
-
Implement the
SyscallDrivertrait.The
SyscallDrivertrait is how a capsule provides implementations for the various syscalls an application might call. The basic framework looks like:#![allow(unused)] fn main() { impl SyscallDriver for WS00123 { fn allow_readwrite( &self, appid: AppId, which, usize, slice: ReadWriteAppSlice, ) -> Result<ReadWriteAppSlice, (ReadWriteAppSlice, ErrorCode)> { } fn allow_readonly( &self, app: AppId, which: usize, slice: ReadOnlyAppSlice, ) -> Result<ReadOnlyAppSlice, (ReadOnlyAppSlice, ErrorCode)> { } fn command( &self, which: usize, r2: usize, r3: usize, caller_id: AppId) -> CommandReturn { } fn allocate_grant( &self, process_id: ProcessId) -> Result<(), crate::process::Error>; } }For details on exactly how these methods work and their return values, TRD104 is their reference document. Notice that there is no
subscribe()call, as that is handled entirely in the core kernel. However, the kernel will use the upcall slots passed as the second parameter toGrant<_, UPCALLS>to implementsubscribe()on your behalf.Note: there are default implementations for each of these, so in our water level sensor case we can simply omit the
allow_readwriteandallow_readonlycalls.By Tock convention, every syscall interface must at least support the command call with
which == 0. This allows applications to check if the syscall interface is supported on the current platform. The command must return aCommandReturn::success(). If the command is not present, then the kernel automatically has it return a failure with an error code ofErrorCode::NOSUPPORT. For our example, we use the simple case:#![allow(unused)] fn main() { impl SyscallDriver for WS00123 { fn command( &self, which: usize, r2: usize, r3: usize, caller_id: AppId) -> CommandReturn { match command_num { 0 => CommandReturn::success(), _ => CommandReturn::failure(ErrorCode::NOSUPPORT) } } } }We also want to ensure that we implement the
allocate_grant()call. This allows the kernel to ask us to setup our grant region since we know what the typeAppis and how large it is. We just need the standard implementation that we can directly copy in.#![allow(unused)] fn main() { impl SyscallDriver for WS00123 { fn allocate_grant( &self, process_id: ProcessId) -> Result<(), kernel::process::Error> { // Allocation is performed implicitly when the grant region is entered. self.apps.enter(processid, |_, _| {}) } } }Next we can implement more commands so that the application can direct our capsule as to what the application wants us to do. We need two commands, one to sample and one to enable the alert. In both cases the commands must return a
ReturnCode, and call functions that likely already exist in the original implementation of theWS00123sensor. If the functions don't quite exist, then they will need to be added as well.#![allow(unused)] fn main() { impl SyscallDriver for WS00123 { /// Command interface. /// /// ### `command_num` /// /// - `0`: Return SUCCESS if this driver is included on the platform. /// - `1`: Start a water level measurement. /// - `2`: Enable the water level detection alert. `data` is used as the /// height to set as the the threshold for detection. fn command( &self, which: usize, r2: usize, r3: usize, caller_id: AppId) -> CommandReturn { match command_num { 0 => CommandReturn::success(), 1 => self.start_measurement(app), 2 => { // Save the threshold for this app. self.apps .enter(app_id, |app, _| { app.threshold = data; CommandReturn::success() }) .map_or_else( |err| CommandReturn::failure(ErrorCode::from), |ok| self.set_high_level_detection() ) }, _ => CommandReturn::failure(ErrorCode::NOSUPPORT), } } } }The last item that needs to be added is to actually use the upcall when the sensor has been sampled or the alert has been triggered. Actually issuing the upcall will need to be added to the existing implementation of the capsule. As an example, if our water sensor was attached to the board over I2C, then we might trigger the upcall in response to a finished I2C command:
#![allow(unused)] fn main() { impl i2c::I2CClient for WS00123 { fn command_complete(&self, buffer: &'static mut [u8], _error: i2c::Error) { ... let app_id = <get saved appid for the app that issued the command>; let measurement = <calculate water level based on returned I2C data>; self.apps.enter(app_id, |app, upcalls| { upcalls.schedule_upcall(0, (0, measurement, 0)).ok(); }); } } }Note: the first argument to
schedule_upcall()is the index of the upcall to use. Since we only have one upcall we use0.There may be other cleanup code required to reset state or prepare the sensor for another sample by a different application, but these are the essential elements for implementing the syscall interface.
Finally, we need to assign our new
SyscallDriverimplementation a number so that the kernel (and userspace apps) can differentiate this syscall interface from all others that a board supports. By convention this is specified by a global value at the top of the capsule file:#![allow(unused)] fn main() { pub const DRIVER_NUM: usize = 0x80000A; }The value cannot conflict with other capsules in use, but can be set arbitrarily, particularly for testing. Tock has a procedure for assigning numbers, and you may need to change this number if the capsule is to merged into the main Tock repository.
Checkpoint: You have the syscall interface translated from a design to code that can run inside the Tock kernel.
-
Document the interface.
A syscall interface is a contract between the kernel and any number of userspace processes, and processes should be able to be developed independently of the kernel. Therefore, it is helpful to document the new syscall interface you made so applications know how to use the various command, subscribe, and allow calls.
An example markdown file documenting our water level syscall interface is as follows:
--- driver number: 0x80000A --- # Water Level Sensor WS00123 ## Overview The WS00123 water level sensor can sample the depth of water as well as trigger an event if the water level gets too high. ## Command - ### Command number: `0` **Description**: Does the driver exist? **Argument 1**: unused **Argument 2**: unused **Returns**: SUCCESS if it exists, otherwise ENODEVICE - ### Command number: `1` **Description**: Initiate a sensor reading. When a reading is ready, a callback will be delivered if the process has `subscribed`. **Argument 1**: unused **Argument 2**: unused **Returns**: `EBUSY` if a reading is already pending, `ENOMEM` if there isn't sufficient grant memory available, or `SUCCESS` if the sensor reading was initiated successfully. - ### Command number: `2` **Description**: Enable the high water detection. THe callback will the alert will be delivered if the process has `subscribed`. **Argument 1**: The water depth to alert for. **Argument 2**: unused **Returns**: `EBUSY` if a reading is already pending, `ENOMEM` if there isn't sufficient grant memory available, or `SUCCESS` if the sensor reading was initiated successfully. ## Subscribe - ### Subscribe number: `0` **Description**: Subscribe an upcall for sensor readings and alerts. **Upcall signature**: The upcall's first argument is `0` if this is a measurement, and `1` if the callback is an alert. If it is a measurement the second value will be the water level. **Returns**: SUCCESS if the subscribe was successful or ENOMEM if the driver failed to allocate memory to store the upcall.This file should be named
<driver_num>_<sensor>.md, or in this case:80000A_ws00123.md. -
Expose the interface to userspace.
The last kernel implementation step is to let the main kernel know about this new syscall interface so that if an application tries to use it the kernel knows which implementation of
SyscallDriverto call. In each board'smain.rsfile (e.g.boards/hail/src/main.rs) there is an implementation of theSyscallDriverLookuptrait where the board can setup which syscall interfaces it supports. To enable our water sensor interface we add a new entry to the match statement there:#![allow(unused)] fn main() { impl SyscallDriverLookup for Hail { fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R where F: FnOnce(Option<&dyn kernel::Driver>) -> R, { match driver_num { ... capsules::ws00123::DRIVER_NUM => f(Some(self.ws00123)), ... _ => f(None), } } } } -
Implement the syscall library in userspace.
At this point userspace applications can use our new syscall interface and interact with the water sensor. However, applications would have to call all of the syscalls directly, and that is fairly difficult to get right and not user friendly. Therefore, we typically implement a small library layer in userspace to make using the interface easier.
In this guide we will be setting up a C library, and to do so we will create
libtock-c/libtock/ws00123.handlibtock-c/libtock/ws00123.c, both of which will be added to the libtock-c repository. The .h file defines the public interface and constants:#pragma once #include "tock.h" #ifdef __cplusplus extern "C" { #endif #define DRIVER_NUM_WS00123 0x80000A int ws00123_set_callback(subscribe_cb callback, void* callback_args); int ws00123_read_water_level(); int ws00123_enable_alerts(uint32_t threshold); #ifdef __cplusplus } #endifWhile the .c file provides the implementations:
#include "ws00123.h" #include "tock.h" int ws00123_set_callback(subscribe_cb callback, void* callback_args) { return subscribe(DRIVER_NUM_WS00123, 0, callback, callback_args); } int ws00123_read_water_level() { return command(DRIVER_NUM_WS00123, 1, 0, 0); } int ws00123_enable_alerts(uint32_t threshold) { return command(DRIVER_NUM_WS00123, 2, threshold, 0); }This is a very basic implementation of the interface, but it provides some more readable names to the numbers that make up the syscall interface. See other examples in libtock for how to make synchronous versions of asynchronous operations (like reading the sensor).
Wrap-Up
Congratulations! You have added a new API for userspace applications using the Tock syscall interface! We encourage you to submit a pull request to upstream this to the Tock repository.
Implementing a HIL Interface
This guide describes the process of creating a new HIL interface in Tock. "HIL"s are one or more Rust traits that provide a standard and shared interface between pieces of the Tock kernel.
Background
The most canonical use for a HIL is to provide an interface to hardware peripherals to capsules. For example, a HIL for SPI provides an interface between the SPI hardware peripheral in a microcontroller and a capsule that needs a SPI bus for its operation. The HIL is a generic interface, so that same capsule can work on different microcontrollers, as long as each microcontroller implements the SPI HIL.
HILs are also used for other generic kernel interfaces that are relevant to capsules. For example, Tock defines a HIL for a "temperature sensor". While a temperature sensor is not generally a hardware peripheral, a capsule may want to use a generic temperature sensor interface and not be restricted to using a particular temperature sensor driver. Having a HIL allows the capsule to use a generic interface. For consistency, these HILs are also specified in the kernel crate.
Note: In the future Tock will likely split these interface types into separate groups.
HIL development often significantly differs from other development in Tock. In particular, HILs can often be written quickly, but tend to take numerous iterations over relatively long periods of time to refine. This happens for three general reasons:
- HILs are intended to be generic, and therefore implementable by a range of different hardware platforms. Designing an interface that works for a range of different hardware takes time and experience with various MCUs, and often incompatibilities aren't discovered until an implementation proves to be difficult (or impossible).
- HILs are Rust traits, and Rust traits are reasonably complex and offer a fair bit of flexibility. Balancing both leveraging the flexibility Rust provides and avoiding undue complexity takes time. Again, often trial-and-error is required to settle on how traits should be composed to best capture the interface.
- HILs are intended to be generic, and therefore will be used in a variety of different use cases. Ensuring that the HIL is expressive enough for a diverse set of uses takes time. Again, often the set of uses is not known initially, and HILs often have to be revised as new use cases are discovered.
Therefore, we consider HILs to be evolving interfaces.
Tips on HIL Development
As getting a HIL interface "correct" is difficult, Tock tends to prefer starting with simple HIL interfaces that are typically inspired by the hardware used when the HIL is initially created. Trying to generalize a HIL too early can lead to complexity that is never actually warranted, or complexity that didn't actually address a problem.
Also, Tock prefers to only include code (or in this case HIL interface functions) that are actually in use by the Tock code base. This ensures that there is at least some method of using or testing various components of Tock. This also suggests that initial HIL development should only focus on an interface that is needed by the initial use case.
Overview
The high-level steps required are:
- Determine that a new HIL interface is needed.
- Create the new HIL in the kernel crate.
- Ensure the HIL file includes sufficient documentation.
Step-by-Step Guide
The steps from the overview are elaborated on here.
-
Determine that a new HIL interface is needed.
Tock includes a number of existing HIL interfaces, and modifying an existing HIL is preferred to creating a new HIL that is similar to an existing interface. Therefore, you should start by verifying an existing HIL does not already meet your need or could be modified to meet your need.
This may seem to be a straightforward step, but it can be complicated by microcontrollers calling similar functionality by different names, and the existing HIL using a standard name or a different name from another microcontroller.
Also, you can reach out via the email list or slack if you have questions about whether a new HIL is needed or an existing one should suffice.
-
Create the new HIL in the kernel crate.
Once you have determined a new HIL is required, you should create the appropriate file in
kernel/src/hil. Often the best way to start is to copy an existing HIL that is similar in nature to the interface you are trying to create.As noted above, HILs evolve over time, and HILs will be periodically updated as issues are discovered or best practices for HIL design are learned. Unfortunately, this means that copying an existing HIL might lead to "mistakes" that must be remedied before the new HIL can be merged.
Likely, it is helpful to open a pull request relatively early in the HIL creation process so that any substantial issues can be detected and corrected quickly.
Tock has a reference guide for dos and don'ts when creating a HIL. Following this guide can help avoid many of the pitfalls that we have run into when creating HILs in the past.
Tock only uses non-blocking interfaces in the kernel, and HILs should reflect that as well. Therefore, for any operation that will take more than a couple cycles to complete, or would require waiting on a hardware flag, a split interface design should be used with a
Clienttrait that receives a callback when the operation has completed. -
Ensure the HIL file includes sufficient documentation.
HIL files should be well commented with Rustdoc style (i.e.
///) comments. These comments are the main source of documentation for HILs.As HILs grow in complexity or stability, they will be documented separately to fully explain their design and intended use cases.
Wrap-Up
Congratulations! You have implemented a new HIL in Tock! We encourage you to submit a pull request to upstream this to the Tock repository.
Implementing an in-kernel Virtualization Layer
This guide provides an overview and walkthrough on how to add an in-kernel virtualization layer, such that a given hardware interface can be used simultaneously by multiple kernel capsules, or used simultaneously by a single kernel capsule and userspace. Ideally, virtual interfaces will be available for all hardware interfaces in Tock. Some example interfaces which have already been virtualized include Alarm, SPI, Flash, UART, I2C, ADC, and others.
In this guide we will use a running example of virtualizing a single hardware SPI peripheral and bus for use as a SPI Master.
Setup
This guide assumes you already have existing kernel code that needs to be virtualized. There should be an existing HIL for the resource you are virtualizing.
We will assume there is a trait SpiMaster {...} already defined and
implemented that includes all of the logic needed to interface with the
underlying SPI. We also assume there is a trait SpiMasterClient that
determines the interface a client of the SPI exposes to the underlying resource.
In most cases, equivalent traits will represent a necessary precursor to
virtualization.
Overview
The high-level steps required are:
- Create a capsule file for your virtualizer
- Determine what portions of this interface should be virtualized.
- Create a
MuxXXXstruct, which will serve as the lone client of the underlying resource. - Create a
VirtualXXXDevicewhich will implement the underlying HIL trait, allowing for the appearance of multiple of the lone resource. - Implement the logic for queuing requests from capsules.
- Implement the logic for dispatching callbacks from the underlying resource to the appropriate client.
- Document the interface.
- (Optional) Write tests for the virtualization logic.

Step-by-Step Guide
The steps from the overview are elaborated on here.
-
Create a capsule file for your virtualizer
This step is easy. Navigate to the
capsules/src/directory and create a new file namedvirtual_xxx, wherexxxis the name of the underlying resource being virtualized. All of the code you will write while following this guide belongs in that file. Additionally, opencapsules/src/lib.rsand addpub mod virtual_xxx;to the list of modules. -
Determine what portions of this interface should be virtualized
Generally, this step requires looking at the HIL being virtualized, and determining what portions of the HIL require additional logic to handle multiple concurrent clients. Lets take a look at the SPIMaster HIL:
#![allow(unused)] fn main() { pub trait SpiMaster { fn set_client(&self, client: &'static dyn SpiMasterClient); fn init(&self); fn is_busy(&self) -> bool; /// Perform an asynchronous read/write operation, whose /// completion is signaled by invoking SpiMasterClient on /// the initialized client. fn read_write_bytes( &self, write_buffer: &'static mut [u8], read_buffer: Option<&'static mut [u8]>, len: usize, ) -> ReturnCode; fn write_byte(&self, val: u8); fn read_byte(&self) -> u8; fn read_write_byte(&self, val: u8) -> u8; /// Tell the SPI peripheral what to use as a chip select pin. fn specify_chip_select(&self, cs: Self::ChipSelect); /// Returns the actual rate set fn set_rate(&self, rate: u32) -> u32; fn get_rate(&self) -> u32; fn set_clock(&self, polarity: ClockPolarity); fn get_clock(&self) -> ClockPolarity; fn set_phase(&self, phase: ClockPhase); fn get_phase(&self) -> ClockPhase; // These two functions determine what happens to the chip // select line between transfers. If hold_low() is called, // then the chip select line is held low after transfers // complete. If release_low() is called, then the chip select // line is brought high after a transfer completes. A "transfer" // is any of the read/read_write calls. These functions // allow an application to manually control when the // CS line is high or low, such that it can issue multi-byte // requests with single byte operations. fn hold_low(&self); fn release_low(&self); } }For some of these functions, it is clear that no virtualization is required. For example,
get_rate(),get_phase()andget_polarity()simply request information on the current configuration of the underlying hardware. Implementations of these can simply pass the call straight through the mux.Some other functions are not appropriate to expose to virtual clients at all. For example,
hold_low(),release_low(), andspecify_chip_select()are not suitable for use when the underlying bus is shared.init()does not make sense when it is unclear which client should call it. The mux should queue operations, so clients should not need access tois_busy().For other functions, it is clear that virtualization is necessary. For example, it is clear that if multiple clients are using the Mux, they cannot all be allowed set the rate of the underlying hardware at arbitrary times, as doing so could break an ongoing operation initiated by an underlying client. However, it is important to expose this functionality to clients. Thus
set_rate(),set_clock()andset_phase()need to be virtualized, and provided to virtual clients.set_client()needs to be adapted to support multiple simultaneous clients.Finally, virtual clients need a way to send and receive on the bus. Single byte writes and reads are typically only used under the assumption that a single client is going to make multiple single byte reads/writes consecutively, and thus are inappropriate to virtualize. Instead, the virtual interface should only include
read_write_bytes(), as that encapsulates the entire transaction that would be desired by a virtual client.Given that not all parts of the original HIL trait (
SpiMaster) are appropriate for virtualization, we should create a new trait in the SPI HIL that will represent the interface provided to clients of the Virtual SPI:#![allow(unused)] fn main() { //! kernel/src/hil/spi.rs ... /// SPIMasterDevice provides a chip-specific interface to the SPI Master /// hardware. The interface wraps the chip select line so that chip drivers /// cannot communicate with different SPI devices. pub trait SpiMasterDevice { /// Perform an asynchronous read/write operation, whose /// completion is signaled by invoking SpiMasterClient.read_write_done on /// the provided client. fn read_write_bytes( &self, write_buffer: &'static mut [u8], read_buffer: Option<&'static mut [u8]>, len: usize, ) -> ReturnCode; /// Helper function to set polarity, clock phase, and rate all at once. fn configure(&self, cpol: ClockPolarity, cpal: ClockPhase, rate: u32); fn set_polarity(&self, cpol: ClockPolarity); fn set_phase(&self, cpal: ClockPhase); fn set_rate(&self, rate: u32); fn get_polarity(&self) -> ClockPolarity; fn get_phase(&self) -> ClockPhase; fn get_rate(&self) -> u32; } }Not all virtualizers will require a new trait to provide virtualization! For example,
VirtualMuxDigestexposes the sameDigestHIL as the underlying hardware. Same forVirtualAlarm,VirtualUart, andMuxFlash.VirtualI2Cdoes use a different trait, similarly to SPI, andVirtualADCintroduces anAdcChanneltrait to enable virtualization that is not possible with the ADC interface implemented by hardware.There is no fixed algorithm for deciding exactly how to virtualize a given interface, and doing so will require thinking carefully about the requirements of the clients and nature of the underlying resource. Tock's threat model describes several requirements for virtualizers in its virtualization section.
Note: You should read these requirements!! They discuss things like the confidentiality and fairness requirements for virtualizers.
Beyond the threat model, you should think carefully about how virtual clients will use the interface, the overhead (in cycles / code size / RAM use) of different approaches, and how the interface will work in the face of multiple concurrent requests. It is also important to consider the potential for two layers of virtualization, when one of the clients of the virtualization capsule is a userspace driver that will also be virtualizing that same resource. In some cases (see: UDP port reservations) special casing the userspace driver may be valuable.
Frequently the best approach will involve looking for an already virtualized resource that is qualitatively similar to the resource you are working with, and using its virtualization as a template.
-
Create a
MuxXXXstruct, which will serve as the lone client of the underlying resource.In order to virtualize a hardware resource, we need to create some object that has a reference to the underlying hardware resource and that will hold the multiple "virtual" devices which clients will interact with. For the SPI interface, we call this struct
MuxSpiMaster:#![allow(unused)] fn main() { /// The Mux struct manages multiple Spi clients. Each client may have /// at most one outstanding Spi request. pub struct MuxSpiMaster<'a, Spi: hil::spi::SpiMaster> { // The underlying resource being virtualized spi: &'a Spi, // A list of virtual devices which clients will interact with. // (See next step for details) devices: List<'a, VirtualSpiMasterDevice<'a, Spi>>, // Additional data storage needed to implement virtualization logic inflight: OptionalCell<&'a VirtualSpiMasterDevice<'a, Spi>>, } }Here we use Tock's built-in
Listtype, which is a LinkedList of statically allocated structures that implement a given trait. This type is required because Tock does not allow heap allocation in the Kernel.Typically, this struct will implement some number of private helper functions used as part of virtualization, and provide a public constructor. For now we will just implement the constructor:
#![allow(unused)] fn main() { impl<'a, Spi: hil::spi::SpiMaster> MuxSpiMaster<'a, Spi> { pub const fn new(spi: &'a Spi) -> MuxSpiMaster<'a, Spi> { MuxSpiMaster { spi: spi, devices: List::new(), inflight: OptionalCell::empty(), } } // TODO: Implement virtualization logic helper functions } } -
Create a
VirtualXXXDevicewhich will implement the underlying HIL traitIn the previous step you probably noticed the list of virtual devices referencing a
VirtualSpiMasterDevice, which we had not created yet. We will define and implement that struct here. In practice, both must be defined simultaneously because each type references the other. TheVirtualSpiMasterDeviceshould have a reference to the mux, aListLinkfield (required so that lists ofVirtualSpiMasterDevices can be constructed), and other fields for data that needs to be stored for each client of the virtualizer.#![allow(unused)] fn main() { pub struct VirtualSpiMasterDevice<'a, Spi: hil::spi::SpiMaster> { //reference to the mux mux: &'a MuxSpiMaster<'a, Spi>, // Pointer to next element in the list of devices next: ListLink<'a, VirtualSpiMasterDevice<'a, Spi>>, // Per client data that must be stored across calls chip_select: Cell<Spi::ChipSelect>, txbuffer: TakeCell<'static, [u8]>, rxbuffer: TakeCell<'static, [u8]>, operation: Cell<Op>, client: OptionalCell<&'a dyn hil::spi::SpiMasterClient>, } impl<'a, Spi: hil::spi::SpiMaster> VirtualSpiMasterDevice<'a, Spi> { pub const fn new( mux: &'a MuxSpiMaster<'a, Spi>, chip_select: Spi::ChipSelect, ) -> VirtualSpiMasterDevice<'a, Spi> { VirtualSpiMasterDevice { mux: mux, chip_select: Cell::new(chip_select), txbuffer: TakeCell::empty(), rxbuffer: TakeCell::empty(), operation: Cell::new(Op::Idle), next: ListLink::empty(), client: OptionalCell::empty(), } } // Most virtualizers will use a set_client method that looks exactly like this pub fn set_client(&'a self, client: &'a dyn hil::spi::SpiMasterClient) { self.mux.devices.push_head(self); self.client.set(client); } } }This is the struct that will implement whatever HIL trait we decided on in step 1. In our case, this is the
SpiMasterDevicetrait:#![allow(unused)] fn main() { // Given that there are multiple types of operations we might need to queue, // create an enum that can represent each operation and the data that operation // needs to store. #[derive(Copy, Clone, PartialEq)] enum Op { Idle, Configure(hil::spi::ClockPolarity, hil::spi::ClockPhase, u32), ReadWriteBytes(usize), SetPolarity(hil::spi::ClockPolarity), SetPhase(hil::spi::ClockPhase), SetRate(u32), } impl<Spi: hil::spi::SpiMaster> hil::spi::SpiMasterDevice for VirtualSpiMasterDevice<'_, Spi> { fn configure(&self, cpol: hil::spi::ClockPolarity, cpal: hil::spi::ClockPhase, rate: u32) { self.operation.set(Op::Configure(cpol, cpal, rate)); self.mux.do_next_op(); } fn read_write_bytes( &self, write_buffer: &'static mut [u8], read_buffer: Option<&'static mut [u8]>, len: usize, ) -> ReturnCode { self.txbuffer.replace(write_buffer); self.rxbuffer.put(read_buffer); self.operation.set(Op::ReadWriteBytes(len)); self.mux.do_next_op(); ReturnCode::SUCCESS } fn set_polarity(&self, cpol: hil::spi::ClockPolarity) { self.operation.set(Op::SetPolarity(cpol)); self.mux.do_next_op(); } fn set_phase(&self, cpal: hil::spi::ClockPhase) { self.operation.set(Op::SetPhase(cpal)); self.mux.do_next_op(); } fn set_rate(&self, rate: u32) { self.operation.set(Op::SetRate(rate)); self.mux.do_next_op(); } fn get_polarity(&self) -> hil::spi::ClockPolarity { self.mux.spi.get_clock() } fn get_phase(&self) -> hil::spi::ClockPhase { self.mux.spi.get_phase() } fn get_rate(&self) -> u32 { self.mux.spi.get_rate() } } }Now we can begin to see the virtualization logic. Each
get_x()method just forwards calls directly to the underlying hardware driver, as these operations are synchronous and non-blocking. But theset()calls and the read/write calls are queued as operations. Each client can have only a single outstanding operation (a common requirement for virtualizers in Tock given the lack of dynamic allocation). These operations are "queued" by each client simply setting the operation field of itsVirtualSpiMasterDeviceto whatever operation it would like to perform next. The Mux can iterate through the list of devices to choose a pending operation. Clients learn about the completion of operations via callbacks, informing them that they can begin new operations. -
Implement the logic for queuing requests from capsules.
So far, we have sketched out a skelton for how we will queue requests from capsules, but not yet implemented the
do_next_op()function that will handle the order in which operations are performed, or how operations are translated into calls by the actual hardware driver.We know that all operations in Tock are asynchronous, so it is always possible that the underlying hardware device is busy when
do_next_op()is called -- accordingly, we need some mechanism for tracking if the underlying device is currently busy. We also need to restore the state expected by the device performing a given operaion (e.g. the chip select pin in use). Beyond that, we just forward calls to the hardware driver:#![allow(unused)] fn main() { fn do_next_op(&self) { if self.inflight.is_none() { let mnode = self .devices .iter() .find(|node| node.operation.get() != Op::Idle); mnode.map(|node| { self.spi.specify_chip_select(node.chip_select.get()); let op = node.operation.get(); // Need to set idle here in case callback changes state node.operation.set(Op::Idle); match op { Op::Configure(cpol, cpal, rate) => { // The `chip_select` type will be correct based on // what implemented `SpiMaster`. self.spi.set_clock(cpol); self.spi.set_phase(cpal); self.spi.set_rate(rate); } Op::ReadWriteBytes(len) => { // Only async operations want to block by setting // the devices as inflight. self.inflight.set(node); node.txbuffer.take().map(|txbuffer| { let rxbuffer = node.rxbuffer.take(); self.spi.read_write_bytes(txbuffer, rxbuffer, len); }); } Op::SetPolarity(pol) => { self.spi.set_clock(pol); } Op::SetPhase(pal) => { self.spi.set_phase(pal); } Op::SetRate(rate) => { self.spi.set_rate(rate); } Op::Idle => {} // Can't get here... } }); } } }Notably, the SPI driver does not implement any fairness schemes, despite the requirements of the threat model. As of this writing, the threat model is still aspirational, and not followed for all virtualizers. Eventually, this driver should be updated to use round robin queueing of clients, rather than always giving priority to whichever client was added to the List first.
-
Implement the logic for dispatching callbacks from the underlying resource to the appropriate client.
We are getting close! At this point, we have a mechanism for adding clients to the virtualizer, and for queueing and making calls. However, we have not yet addressed how to handle callbacks from the underlying resource (usually used to forward interrupts up to the appropriate client). Additionally, our queueing logic is still incomplete, as we have not yet seen when subsequent operations are triggered if an operation is requested while the underlying device is in use.
Handling callbacks in virtualizers requires two layers of handling. First, the
MuxXXXdevice must implement the appropriateXXXClienttrait such that it can subscribe to callbacks from the underlying resource, and dispatch them to the appropriateVirtualXXXDevice:#![allow(unused)] fn main() { impl<Spi: hil::spi::SpiMaster> hil::spi::SpiMasterClient for MuxSpiMaster<'_, Spi> { fn read_write_done( &self, write_buffer: &'static mut [u8], read_buffer: Option<&'static mut [u8]>, len: usize, ) { self.inflight.take().map(move |device| { self.do_next_op(); device.read_write_done(write_buffer, read_buffer, len); }); } } }This takes advantage of the fact that we stored a reference to device that initiated the inflight operation, so we can dispatch the callback directly to that device. One thing to note is that the call to
take()setsinflighttoNone, and then the callback callsdo_next_op(), triggering any still queued operations. This ensures that all queued operations will take place. This all requires that the device also has implemented the callback:#![allow(unused)] fn main() { impl<Spi: hil::spi::SpiMaster> hil::spi::SpiMasterClient for VirtualSpiMasterDevice<'_, Spi> { fn read_write_done( &self, write_buffer: &'static mut [u8], read_buffer: Option<&'static mut [u8]>, len: usize, ) { self.client.map(move |client| { client.read_write_done(write_buffer, read_buffer, len); }); } }Finally, we have dispatched the callback all the way up to the client of the virtualizer, completing the round trip process.
-
Document the interface.
Finally, you need to document the interface. Do so by placing a comment at the top of the file describing what the file does:
#![allow(unused)] fn main() { //! Virtualize a SPI master bus to enable multiple users of the SPI bus. }and add doc comments (
/// doc comment example) to any new traits created inkernel/src/hil. -
(Optional) Write tests for the virtualization logic.
Some virtualizers provide additional stress tests of virtualization logic, which can be run on hardware to perform correct operation in edge cases. For examples of such tests, look at
capsules/src/test/virtual_uart.rsorcapsules/src/test/random_alarm.rs.
Wrap-Up
Congratulations! You have virtualized a resource in the Tock kernel! We encourage you to submit a pull request to upstream this to the Tock repository.
Implementing a Kernel Test
This guide covers how to write in-kernel tests of hardware functionality. For example, if you have implemented a chip peripheral, you may want to write in-kernel tests of that peripheral to test peripheral-specific functionality that will not be exposed via the HIL for that peripheral. This guide outlines the general steps for implementing kernel tests.
Setup
This guide assumes you have existing chip, board, or architecture specific code that you wish to test from within the kernel.
Note: If you wish to test kernel code with no hardware dependencies at all, such as a ring buffer implementation, you can use cargo's test framework instead. These tests can be run by simply calling
cargo testwithin the crate that the test is located, and will be executed during CI for all tests merged into upstream Tock. An example of this approach can be found inkernel/src/collections/ring_buffer.rs.
Overview
The general steps you will follow are:
- Determine the board(s) you want to run your tests on
- Add a test file in
boards/{board}/src/tests/ - Determine where to write actual tests -- in the test file or a capsule test
- Write your tests
- Call the test from
main.rs - Document the expected output from the test at the top of the test file
This guide will walk through how to do each of these steps.
Background
Kernel tests allow for testing of hardware-specific functionality that is not
exposed to userspace, and allows for fail-fast tests at boot that otherwise
would not be exposed until apps are loaded. Kernel tests can be useful to test
chip peripherals prior to exposing these peripherals outside the Kernel. Kernel
tests can also be included as required tests run prior to releases, to ensure
there have been no regressions for a particular component. Additionally, kernel
tests can be useful for testing capsule functionality from within the kernel,
such as when unsafe is required to verify the results of tests, or for testing
virtualization capsules in a controlled environment.
Kernel tests are generally implemented on an as-needed basis, and are not
required for all chip peripherals in Tock. In general, they are not expected to
be run in the default case, though they should always be included from main.rs
so they are compiled. These tests are allowed to use unsafe as needed, and are
permitted to conflict with normal operation, by stealing callbacks from drivers
or modifying global state.
Notably, your specific use case may differ some from the one outline here. It is
always recommended to attempt to copy from existing Tock code when developing
your own solutions. A good collection of kernel tests can be found in
boards/imix/src/tests/ for that purpose.
Step-by-Step Guide
The steps from the overview are elaborated on here.
-
Determine the board(s) you want to run your test on.
If you are testing chip or architecture specific functionality, you simply need to choose a board that uses that chip or architecture. For board specific functionality you of course need to choose that board. If you are testing a virtualization capsule, then any board that implements the underlying resource being virtualized is acceptable. Currently, most kernel tests are implemented for the Imix platform, and can be found in
boards/imix/src/tests/Checkpoint: You have identified the board you will implement your test for.
-
Add a test file in
boards/{board}/src/tests/To start implementing the test, you should create a new source file inside the
boards/{board}/src/testsdirectory and add the file to thetests/mod.rsfile. The name of this test file generally should indicate the functionality being tested.Note: If the board you select is one of the nrf52dk variants (nrf52840_dongle, nrf52840dk, or nrf52dk), tests should be moved into the
nrf52dk_base/src/folder, and called fromlib.rs.Checkpoint: You have chosen a board for your test and created a test file.
-
Determine where to write actual tests -- in the test file or a capsule test.
Depending on what you are testing, it may be best practice to write a capsule test that you call from the test file you created in the previous step.
Writing a capsule test is best practice if your test meets the following criteria:
- Test does not require
unsafe - The test is for a peripheral available on multiple boards
- A HIL or capsule exists for that peripheral, so it is accessible from the
capsulescrate - The test relies only on functionality exposed via the HIL or a capsule
- You care about being able to call this test from multiple boards
Examples:
- UART Virtualization (all boards support UART, there is a HIL for UART
devices and a capsule for the
virtual_uart) - Alarm test (all boards will have some form of hardware alarm, there is an Alarm HIL)
- Other examples: see
capsules/core/src/test
If your test meets the criteria for writing a capsule test, follow these steps:
Add a file in
capsules/extra/src/test/, and then add the filename tocapsules/extra/src/mod.rslike this:#![allow(unused)] fn main() { pub mod virtual_uart; }Next, create a test struct in this file that can be instantiated by any board using this test capsule. This struct should implement a
new()function so it can be instantiated from the test file inboards, and arun()function that will run the actual tests. The test should implementCapsuleTestand hold aCapsuleTestClientto notify when the test has finished.An example for UART follows:
#![allow(unused)] fn main() { //! capsules/src/test/virtual_uart.rs pub struct TestVirtualUartReceive { device: &'static UartDevice<'static>, buffer: TakeCell<'static, [u8]>, client: OptionalCell<&'static dyn CapsuleTestClient>, } impl TestVirtualUartReceive { pub fn new(device: &'static UartDevice<'static>, buffer: &'static mut [u8]) -> Self { TestVirtualUartReceive { device: device, buffer: TakeCell::new(buffer), client: OptionalCell::empty(), } } pub fn run(&self) { // TODO: See Next Step } } impl CapsuleTest for TestVirtualUartReceive { fn set_client(&self, client: &'static dyn CapsuleTestClient) { self.client.set(client); } } } - Test does not require
If your test does not meet the above requirements, you can simply implement your tests in the file that you created in step 2. This can involve creating a test structure with test methods. The UDP test file takes this approach, by defining a number of self-contained tests. One such example follows:
#![allow(unused)] fn main() { //! boards/imix/src/test/udp_lowpan_test.rs pub struct LowpanTest { port_table: &'static UdpPortManager, // ... } impl LowpanTest { // This test ensures that an app and capsule cant bind to the same port // but can bind to different ports fn bind_test(&self) { let create_cap = create_capability!(NetworkCapabilityCreationCapability); let net_cap = unsafe { static_init!( NetworkCapability, NetworkCapability::new(AddrRange::Any, PortRange::Any, PortRange::Any, &create_cap) ) }; let mut socket1 = self.port_table.create_socket().unwrap(); // Attempt to bind to a port that has already been bound by an app. let result = self.port_table.bind(socket1, 1000, net_cap); assert!(result.is_err()); socket1 = result.unwrap_err(); // Get the socket back //now bind to an open port let (_send_bind, _recv_bind) = self .port_table .bind(socket1, 1001, net_cap) .expect("UDP Bind fail"); debug!("bind_test passed"); } // ... } }
Checkpoint: There is a test capsule with new() and run()
implementations.
-
Write your tests
The first part of this step takes place in the test file you just created -- writing the actual tests. This part is highly dependent on the functionality being verified. If you are writing your tests in test capsule, this should all be triggered from the
run()function.Depending on the specifics of your test, you may need to implement additional functions or traits in this file to make your test functional. One example is implementing a client trait on the test struct so that the test can receive the results of asynchronous operations. Our UART example requires implementing the
uart::RecieveClienton the test struct.When finished, the test should call the
CapsuleTestClientwith the result (pass/fail) of the test. If the test succeed, the callback should be passedOk(()). If the test failed, the callback should be called withErr(CapsuleTestError).#![allow(unused)] fn main() { //! boards/imix/src/test/virtual_uart_rx_test.rs impl TestVirtualUartReceive { // ... pub fn run(&self) { let buf = self.buffer.take().unwrap(); let len = buf.len(); debug!("Starting receive of length {}", len); let (err, _opt) = self.device.receive_buffer(buf, len); if err != ReturnCode::SUCCESS { debug!( "Calling receive_buffer() in virtual_uart test failed: {:?}", err ); self.client.map(|client| { client.done(Err(CapsuleTestError::ErrorCode(ErrorCode::FAIL))); }); } } } impl uart::ReceiveClient for TestVirtualUartReceive { fn received_buffer( &self, rx_buffer: &'static mut [u8], rx_len: usize, rcode: ReturnCode, _error: uart::Error, ) { debug!("Virtual uart read complete: {:?}: ", rcode); for i in 0..rx_len { debug!("{:02x} ", rx_buffer[i]); } debug!("Starting receive of length {}", rx_len); let (err, _opt) = self.device.receive_buffer(rx_buffer, rx_len); if err == ReturnCode::SUCCESS { self.client.map(|client| { client.done(Ok(())); }); } else { debug!( "Calling receive_buffer() in virtual_uart test failed: {:?}", err ); self.client.map(|client| { client.done(Err(CapsuleTestError::ErrorCode(ErrorCode::FAIL))); }); } } } }The next step in this process is determining all of the parameters that need to be passed to the test. It is preferred that all logically related tests be called from a single
pub unsafe fn run(/* optional args */)to maintain convention. This ensures that all tests can be run by adding a single line tomain.rs. Many tests require a reference to an alarm in order to separate tests in time, or a reference to a virtualization capsule that is being tested. Notably, therun()function should initialize any components itself that would not have already been created inmain.rs. As an example, the below function is a starting point for thevirtual_uart_receivetest for Imix:#![allow(unused)] fn main() { pub unsafe fn run_virtual_uart_receive(mux: &'static MuxUart<'static>) { debug!("Starting virtual reads."); } }Next, a test function should initialize any objects required to run tests. This is best split out into subfunctions, like the following:
#![allow(unused)] fn main() { unsafe fn static_init_test_receive_small( mux: &'static MuxUart<'static>, ) -> &'static TestVirtualUartReceive { static mut SMALL: [u8; 3] = [0; 3]; let device = static_init!(UartDevice<'static>, UartDevice::new(mux, true)); device.setup(); let test = static_init!( TestVirtualUartReceive, TestVirtualUartReceive::new(device, &mut SMALL) ); device.set_receive_client(test); test } }This initializes an instance of the test capsule we constructed earlier. Simpler tests (such as those not relying on capsule tests) might simply use
static_init!()to initialize normal capsules directly and test them. The log test does this, for example:#![allow(unused)] fn main() { //! boards/imix/src/test/log_test.rs pub unsafe fn run( mux_alarm: &'static MuxAlarm<'static, Ast>, deferred_caller: &'static DynamicDeferredCall, ) { // Set up flash controller. flashcalw::FLASH_CONTROLLER.configure(); static mut PAGEBUFFER: flashcalw::Sam4lPage = flashcalw::Sam4lPage::new(); // Create actual log storage abstraction on top of flash. let log = static_init!( Log, log::Log::new( &TEST_LOG, &mut flashcalw::FLASH_CONTROLLER, &mut PAGEBUFFER, deferred_caller, true ) ); flash::HasClient::set_client(&flashcalw::FLASH_CONTROLLER, log); log.initialize_callback_handle( deferred_caller .register(log) .expect("no deferred call slot available for log storage"), ); // ... } }Finally, your
run()function should call the actual tests. This may involve simply calling arun()function on a capsule test, or may involve calling test functions written in the board specific test file. The virtual UART testrun()looks like this:#![allow(unused)] fn main() { pub unsafe fn run_virtual_uart_receive(mux: &'static MuxUart<'static>) { debug!("Starting virtual reads."); let small = static_init_test_receive_small(mux); let large = static_init_test_receive_large(mux); small.run(); large.run(); } }As you develop your kernel tests, you may not immediately know what functions are required in your test capsule -- this is okay! It is often easiest to start with a basic test and expand this file to test additional functionality once basic tests are working.
Checkpoint: Your tests are written, and can be called from a single
run()function. -
Call the test from
main.rs, and iterate on it until it worksNext, you should run your test by calling it from the
reset_handler()inmain.rs. In order to do so, you will also need it import it into the file by adding a line like this:#![allow(unused)] fn main() { #[allow(dead_code)] mod virtual_uart_test; }However, if your test is located inside a
testmodule this is not needed -- your test will already be included.Typically, tests are called after completing setup of the board, immediately before the call to
load_processes():#![allow(unused)] fn main() { virtual_uart_rx_test::run_virtual_uart_receive(uart_mux); debug!("Initialization complete. Entering main loop"); extern "C" { /// Beginning of the ROM region containing app images. static _sapps: u8; /// End of the ROM region containing app images. /// /// This symbol is defined in the linker script. static _eapps: u8; } kernel::procs::load_processes( // ... }Observe your results, and tune or add tests as needed.
Before you submit a PR including any kernel tests, however, please remove or comment out any lines of code that call these tests.
Checkpoint: You have a functional test that can be called in a single line from
main.rs -
Document the expected output from the test at the top of the test file
For tests that will be merged to upstream, it is good practice to document how to run a test and what the expected output of a test is. This is best done using\ document level comments (
//!) at the top of the test file. The documentation for the virtual UART test follows:#![allow(unused)] fn main() { //! Test reception on the virtualized UART by creating two readers that //! read in parallel. To add this test, include the line //! ``` //! virtual_uart_rx_test::run_virtual_uart_receive(uart_mux); //! ``` //! to the imix boot sequence, where `uart_mux` is a //! `capsules::virtual_uart::MuxUart`. There is a 3-byte and a 7-byte //! read running in parallel. Test that they are both working by typing //! and seeing that they both get all characters. If you repeatedly //! type 'a', for example (0x61), you should see something like: //! ``` //! Starting receive of length 3 //! Virtual uart read complete: CommandComplete: //! 61 //! 61 //! 61 //! 61 //! 61 //! 61 //! 61 //! Starting receive of length 7 //! Virtual uart read complete: CommandComplete: //! 61 //! 61 //! 61 //! ``` }Checkpoint: You have documented your tests
Wrap-Up
Congratulations! You have written a kernel test for Tock! We encourage you to submit a pull request to upstream this to the Tock repository.
Implementing a Component
Each Tock board defines the peripherals, capsules, kernel settings, and syscall drivers to customize Tock for that board. Often, instantiating different resources (particularly capsules and drivers) requires subtle setup steps that are easy to get wrong. The setup steps are often shared from board-to-board. Together, this makes configuring a board redundant and easy to make a mistake.
Components are the Tock mechanism to help address this. Each component includes the static memory allocations and setup steps required to implement a particular piece of kernel functionality (i.e. a capsule). You can read more technical documentation here.
In this guide we will create a component for a hypothetical system call driver
called Notifier. Our system call driver is going to use an alarm as a resource
and requires just one other parameter: a delay value in milliseconds. The steps
should be the same for any capsule you want to create a component for.
Setup
This guide assumes you already have the capsule created, and ideally that you have set it up with a board to test. Making a component then just makes it easier to include on a new board and share among boards.
Overview
The high-level steps required are:
- Define the static memory required for all objects used.
- Create a struct that holds all of the resources and configuration necessary for the capsules.
- Implement
finalize()to initialize memory and perform setup. - Define a helper type for using components in boards.
Step-by-Step Guide
The steps from the overview are elaborated on here.
-
Define the static memory required for all objects used.
All objects in the kernel are statically allocated, so we need to statically allocate memory for the objects to live in. Due to constraints on the macros Tock provides for statically allocating memory, we must contain all calls to allocate this memory within another macro.
Create a file in
boards/components/srcto hold the component.We need to define a macro to setup our state. We will use the
static_buf!()macro to help with this. In the file, create a macro with the name<your capsule>_component_static. This naming convention must be followed.In our hypothetical case, we need to allocate room for the notifier capsule and a buffer. Each capsule might need slightly different resources.
#![allow(unused)] fn main() { #[macro_export] macro_rules! notifier_driver_component_static { ($A:ty $(,)?) => {{ let notifier_buffer = kernel::static_buf!([u8; 16]); let notifier_driver = kernel::static_buf!( capsules_extra::notifier::NotifierDriver<'static, $A> ); (notifier_buffer, notifier_driver) };}; } }Notice how the macro uses the type
$Awhich is the type of the underlying alarm. We also use full paths to avoid errors when the macro is used. The macro then "returns" the two statically allocated resources. -
Create a struct that holds all of the resources and configuration necessary for the capsules.
Now we create the actual component object which collects all of the resources and any configuration needed to successfully setup this capsule.
#![allow(unused)] fn main() { pub struct NotifierDriverComponent<A: 'static + time::Alarm<'static>> { board_kernel: &'static kernel::Kernel, driver_num: usize, alarm: &'static A, delay_ms: usize, } }The component needs a reference to the board as well as the driver number to be used for this driver. This is to setup the grant, as we will see. If you are not setting up a syscall driver you will not need this. Finally we also need to keep track of the delay the kernel wants to use with this capsule.
Next we can create a constructor for this component object:
#![allow(unused)] fn main() { impl<A: 'static + time::Alarm<'static>> NotifierDriverComponent<A> { pub fn new( board_kernel: &'static kernel::Kernel, driver_num: usize, alarm: &'static A, delay_ms: usize, ) -> AlarmDriverComponent<A> { AlarmDriverComponent { board_kernel, driver_num, alarm, delay_ms, } } } }Note, all configuration that is required must be passed in to this
new()constructor. -
Implement
finalize()to initialize memory and perform setup.The last major step is to implement the
Componenttrait and thefinalize()method to actually setup the capsule.The general format looks like:
#![allow(unused)] fn main() { impl<A: 'static + time::Alarm<'static>> Component for NotifierDriverComponent<A> { type StaticInput = (...); type Output = ...; fn finalize(self, static_buffer: Self::StaticInput) -> Self::Output {} } }We need to define what statically allocated types we need, and what this method will produce:
#![allow(unused)] fn main() { impl<A: 'static + time::Alarm<'static>> Component for AlarmDriverComponent<A> { type StaticInput = ( &'static mut MaybeUninit<[u8; 16]>, &'static mut MaybeUninit<NotifierDriver<'static, $A>>, ); type Output = &'static NotifierDriver<'static, A>; fn finalize(self, static_buffer: Self::StaticInput) -> Self::Output {} } }Notice that the static input types must match the output of the macro. The output type is what we are actually creating.
Inside the
finalize()method we need to initialize the static memory and configure/setup the capsules:#![allow(unused)] fn main() { impl<A: 'static + time::Alarm<'static>> Component for AlarmDriverComponent<A> { type StaticInput = ( &'static mut MaybeUninit<[u8; 16]>, &'static mut MaybeUninit<NotifierDriver<'static, $A>>, ); type Output = &'static NotifierDriver<'static, A>; fn finalize(self, static_buffer: Self::StaticInput) -> Self::Output { let grant_cap = create_capability!(capabilities::MemoryAllocationCapability); let buf = static_buffer.0.write([0; 16]); let notifier = static_buffer.1.write(NotifierDriver::new( self.alarm, self.board_kernel.create_grant(self.driver_num, &grant_cap), buf, self.delay_ms, )); // Very important we set the callback client correctly. self.alarm.set_client(notifier); notifier } } }We initialize the memory for the static buffer, create the grant for the syscall driver to use, provide the driver with the alarm resource, and pass in the delay value to use. Lastly, we return a reference to the actual notifier driver object.
-
Define a helper type for using components in boards.
Finally, we define a helper type which simplifies using components in boards' main.rs files.
This type is named to match the component struct and matches the output type of the component. In our case this looks like:
#![allow(unused)] fn main() { pub struct NotifierDriverType<A> = capsules_extra::notifier::NotifierDriver<'static, A>; }This should be placed right above the component struct definition.
Summary
Our full component looks like:
#![allow(unused)] fn main() { use core::mem::MaybeUninit; use capsules_extra::notifier::NotifierDriver; use kernel::capabilities; use kernel::component::Component; use kernel::create_capability; use kernel::hil::time::{self, Alarm}; #[macro_export] macro_rules! notifier_driver_component_static { ($A:ty $(,)?) => {{ let notifier_buffer = kernel::static_buf!([u8; 16]); let notifier_driver = kernel::static_buf!( capsules_extra::notifier::NotifierDriver<'static, $A> ); (notifier_buffer, notifier_driver) };}; } pub struct NotifierDriverType<A> = capsules_extra::notifier::NotifierDriver<'static, A>; pub struct NotifierDriverComponent<A: 'static + time::Alarm<'static>> { board_kernel: &'static kernel::Kernel, driver_num: usize, alarm: &'static A, delay_ms: usize, } impl<A: 'static + time::Alarm<'static>> NotifierDriverComponent<A> { pub fn new( board_kernel: &'static kernel::Kernel, driver_num: usize, alarm: &'static A, delay_ms: usize, ) -> AlarmDriverComponent<A> { AlarmDriverComponent { board_kernel, driver_num, alarm, delay_ms, } } } impl<A: 'static + time::Alarm<'static>> Component for AlarmDriverComponent<A> { type StaticInput = ( &'static mut MaybeUninit<[u8; 16]>, &'static mut MaybeUninit<NotifierDriver<'static, $A>>, ); type Output = &'static NotifierDriver<'static, A>; fn finalize(self, static_buffer: Self::StaticInput) -> Self::Output { let grant_cap = create_capability!(capabilities::MemoryAllocationCapability); let buf = static_buffer.0.write([0; 16]); let notifier = static_buffer.1.write(NotifierDriver::new( self.alarm, self.board_kernel.create_grant(self.driver_num, &grant_cap), buf, self.delay_ms, )); // Very important we set the callback client correctly. self.alarm.set_client(notifier); notifier } } }
Usage
In a board's main.rs file to use the component:
#![allow(unused)] fn main() { type NotifierDriver = components::notifier::NotifierDriverType<nrf52840::rtc::Rtc>; let notifier = components::notifier::NotifierDriverComponent::new( board_kernel, capsules_core::notifier::DRIVER_NUM, alarm, 100, ) .finalize(components::notifier_driver_component_static!(nrf52840::rtc::Rtc)); }
Wrap-Up
Congratulations! You have created a component to easily create a resource in the Tock kernel! We encourage you to submit a pull request to upstream this to the Tock repository.
Minimizing Tock Code Size
Many embedded applications are ultimately limited by the flash space available on the board in use. This document provides tips on how to write Rust code such that it does not require an undue amount of flash, and highlights some options which can be used to reduce the size required for a particular image.
Code Style: tips for keeping Rust code small
When to use generic types with trait bounds versus trait objects (dyn)
Polymorphic structs and functions are one of the biggest sources of bloat in Rust binaries -- use of generic types can lead to bloat from monomorphization, while use of trait objects introduces vtables into the binary and limits opportunities for inlining.
Use dyn when the function in question will be called with multiple concrete
types; otherwise code size is increased for every concrete type used
(monomorphization).
#![allow(unused)] fn main() { fn set_gpio_client(&dyn GpioClientTrait) -> Self {//...} // elsewhere let radio: Radio = Radio::new(); set_gpio_client(&radio); let button: Button = Button::new(); set_gpio_client(&button); }
Use generics with trait bounds when the function is only ever called with a single public type per board; this reduces code size and run time cost. This increases source code complexity for decreased image size and decreased clock cycles used.
#![allow(unused)] fn main() { // On a given chip, there is only a single FlashController. We use generics so // that there can be a shared interface by all FlashController's on different // chips, but in a given binary this function will never be called with multiple // types. impl<'a, F: FlashController> StorageDriverBackend<'a, F> { pub fn new( storage: &'a StorageController<'a, F>, ) -> Self { ... } }
Similarly, only use const generics when there will not be monomorphization, or if the body of the method which would be monomorphized is sufficiently small that it will be inlined anyways.
Non-generic-inner-functions
Sometimes, generic monomorphization is unavoidable (much of the code in grant.rs is an example of this). When generics must be used despite functions being called with multiple different types, use the non-generic-inner-function method, written about here, and applied in our codebase (see PR 2648 for an example).
Panics
Panics add substantial code size to Tock binaries -- on the order of 50-75 bytes per panic. Returning errors is much cheaper than panicing, and also produces more dependable code. Whenever possible, return errors instead of panicing. Often, this will not only mean avoiding explicit panics: many core library functions panic internally depending on the input.
The most common panics in Tock binaries are from array accesses, but these can often be ergonomically replaced with result-based error handling:
#![allow(unused)] fn main() { // BAD: produces bloat fn do_stuff(&mut self) -> Result<(), ErrorCode> { if self.my_array[4] == 7 { self.other_array[3] = false; Ok(()) } else { Err(ErrorCode::SIZE) } } // GOOD fn do_stuff(&mut self) -> Result<(), ErrorCode> { if self.my_array.get(4).ok_or(ErrorCode::FAIL)? == 7 { *(self.other_array.get_mut(3).ok_or(ErrorCode::FAIL)?) = false; Ok(()) } else { Err(ErrorCode::SIZE) } } }
Similarly, avoid code that could divide by 0, and avoid signed division which
could divide a types MIN value by -1. Finally, avoid using unwrap() /
expect(), and make sure to give the compiler enough information that it can
guarantee copy_from_slice() is only being called on two slices of equal
length.
Formatting overhead
Implementations of fmt::Debug and fmt::Display are expensive -- the core
library functions they rely on include multiple panics and lots of (size)
expensive formatting/unicode code that is unnecessary for simple use cases. This
is well-documented
elsewhere.
Accordingly, use #[derive(Debug)] and fmt::Display sparingly. For simple
enums, manual to_string(&self) -> &str methods can be substantially cheaper.
For example, consider the following enum/use:
#![allow(unused)] fn main() { // BAD #[derive(Debug)] enum TpmState { Idle, Ready, CommandReception, CommandExecutionComplete, CommandExecution, CommandCompletion, } let tpm_state = TpmState::Idle; debug!("{:?}", tpm_state); // GOOD enum TpmState { Idle, Ready, CommandReception, CommandExecutionComplete, CommandExecution, CommandCompletion, } impl TpmState { fn to_string(&self) -> &str { use TpmState::*; match self { Idle => "Idle", Ready => "Ready", CommandReception => "CommandReception", CommandExecutionComplete => "CommandExecutionComplete", CommandExecution => "CommandExecution", CommandCompletion => "CommandCompletion", } } } let tpm_state = TpmState::Idle; debug!("{}", tpm_state.to_string()); }
The latter example is 112 bytes smaller than the former, despite being functionally equivalent.
For structs with runtime values that cannot easily be turned into &str
representations this process is not so straightforward, consider whether the
substantial overhead of calling these methods is worth the debugability
improvement.
64 bit division
Avoid all 64 bit division/modulus, it adds ~1kB if used, as the software techniques for performing these are speed oriented. Often bit manipulation approaches will be much cheaper, especially if one of the operands to the division is a compile-time constant.
Global arrays
For global const/static mut variables, don't store collections in arrays
unless all elements of the array are used.
The canonical example of this is GPIO -- if you have 100 GPIO pins, but your binary only uses 3 of them:
#![allow(unused)] fn main() { pub const GPIO_PINS: [Pin; 100] = [//...]; //BAD -- UNUSED PINS STILL IN BINARY // GOOD APPROACH pub const GPIO_PIN_0: Pin = Pin::new(0); pub const GPIO_PIN_1: Pin = Pin::new(1); pub const GPIO_PIN_2: Pin = Pin::new(2); // ...and so on. }
The latter approach ensures that the compiler can remove pins which are not used from the binary.
Combine register accesses
Combine register accesses into as few volatile operations as possible. E.g.
#![allow(unused)] fn main() { regs.dcfg.modify(DevConfig::DEVSPD::FullSpeed1_1); regs.dcfg.modify(DevConfig::DESCDMA::SET); regs.dcfg.modify(DevConfig::DEVADDR.val(0)); }
is much more expensive than:
#![allow(unused)] fn main() { regs.dcfg.modify( DevConfig::DEVSPD::FullSpeed1_1 + DevConfig::DESCDMA::SET + DevConfig::DEVADDR.val(0), ); }
because each individual modify is volatile so the compiler cannot optimize the calls together.
Minimize calls to Grant::enter()
Grants are fundamental to Tock's architecture, but the internal implementation
of Grants are relatively complex. Further, Grants are generic over all types
that are stored in Grants, so multiple copies of many Grant functions end up in
the binary. The largest of these is Grant::enter(), which is called often in
capsule code. That said, it is often possible to reduce the number of calls to
this method. For example: you can combine calls to apps.enter():
#![allow(unused)] fn main() { // BAD -- DONT DO THIS match command_num { 0 => self.apps.enter(|app, _| {app.perform_cmd_0()}, 1 => self.apps.enter(|app, _| {app.perform_cmd_1()}, } // GOOD -- DO THIS self.apps.enter(|app, _| { match command_num { 0 => app.perform_cmd_0(), 1 => app.perform_cmd_1(), } }) }
The latter saves ~100 bytes because each additional call to Grant::enter()
leads to an additional monomorphized copy of the body of Grant::enter().
Scattered additional tips
- Avoid calling functions in
core::str, there is lots of overhead here that is not optimized out. For example: if you have a space separated string, usingtext.split_ascii_whitespace()costs 150 more bytes than usingtext.as_bytes().split(|b| *b == b' ');. - Avoid static mut globals when possible, and favor global constants. static mut variables are placed in .relocate, so they consume both flash and RAM, and cannot be optimized as well because the compiler cannot make its normal aliasing assumptions.
- Use const generics to pass sized arrays instead of slices, unless this will lead to monomorphization. In addition to removing panics on array accesses, this allows for passing smaller objects (references to arrays are just a pointer, slices are pointer + length), and lets the compiler make additional optimizations based on the known array length.
- Test the effect of
#[inline(always/never)]directives, sometimes the result will surprise you. If the savings are small, it is usually better to leave it up to the compiler, for increased resilience to future changes. - For functions that will not be inlined, try to keep arguments/returns in registers. On RISC-V, this means using <= 8 1-word arguments, no arguments > 2 words, and <= 2 words in return value.
Reducing the size of an out-of-tree board
In general, upstream Tock strives to produce small binaries. However, there is often a tension between code size, debugability, and user friendliness. As a result, upstream Tock does not always choose the most minimal configuration possible. For out-of-tree boards especially focused on code size, there are a few steps you can take to further reduce code size:
- Disable the
debug_panic_infooption inkernel/src/config.rs-- this will remove a lot of debug information that is provided in panics, but can reduce code size by 8-12 kB. - Implement your own peripheral struct that does not include peripherals you do
not need. Often, the
DefaultPeripheralsstruct for a chip may include peripherals not used in your project, and the structure of the interrupt handler means that you will pay the code size cost of the unused peripherals unless you implement your own Peripheral struct. The option to do this was first introduced in PR 2069 and is explained there. - Modify your panic handler to not use the
PanicInfostruct. This will allow LLVM to optimize out the paths, panic messages, line numbers, etc. which would otherwise be stored in the binary to allow users to backtrace and debug panics. - Remove the implementation of
debug!(): if you really want size savings, and are ok not printing anything, you can remove the implementation ofdebug!()and replace it with an empty macro. This will remove the code associated with any calls todebug!()in the core kernel or chip crates that you depend on, as well as any remaining code associated with the fmt machinery. - Fine-tune your inline-threshold. This can have a significant impact, but the
ideal value is dependent on your particular code base, and changes as the
compiler does -- update it when you update the compiler version! In practice,
we have observed that very small values are often optimal (e.g., in the range
of 2 to 10). This is done by passing
-C inline-threshold=xto rustc. - Try
opt-level=sinstead ofopt-level=z. In practice,s(when combined with a reduced inline threshold) often seems to produce smaller binaries. This is worth revisiting periodically, given thatzis supposed to lead to smaller binaries thans.
Porting Tock
This guide covers how to port Tock to a new platform.
This guide is a work in progress. Comments and pull requests are appreciated!
Overview
At a high level, to port Tock to a new platform you will need to create a new
"board" as a crate, as well as potentially add additional "chip" and "arch"
crates. The board crate specifies the exact resources available on a hardware
platform by stitching capsules together with the chip crates (e.g. assigning
pins, setting baud rates, allocating hardware peripherals etc.). The chip crate
implements the peripheral drivers (e.g. UART, GPIO, alarms, etc.) for a specific
microcontroller by implementing the traits found in kernel/src/hil. If your
platform uses a microcontroller already supported by Tock then you can use the
existing chip crate. The arch crate implements the low-level code for a specific
hardware architecture (e.g. what happens when the chip first boots and how
system calls are implemented).
Is Tock a Good Fit for my Hardware?
Before porting Tock to a new platform or microcontroller, you should determine if Tock is a good fit. While we do not have an exact rubric, there are some requirements that we generally look for:
-
Must have requirements:
- Memory protection support. This is generally the MPU on Cortex-M platforms or the PMP on RISC-V platforms.
- At least 32-bit support. Tock is not designed for 16-bit platforms.
- Enough RAM and flash to support userspace applications. "Enough" is underspecified, but generally boards should have at least 64 kB of RAM and 128 kB of flash.
-
Generally expected requirements:
- The platform should be 32-bit. Tock may support 64-bit in the future.
- The platform should be single core. A multicore CPU is OK, but the expectation is that only one core will be used with Tock.
Crate Details
This section includes more details on what is required to implement each type of crate for a new hardware platform.
arch Crate
Tock currently supports the ARM Cortex-M0, Cortex-M3, and Cortex M4, and the rv32i architectures. There is not much architecture-specific code in Tock, the list is pretty much:
- Syscall entry/exit
- Interrupt configuration
- Top-half interrupt handlers
- MPU configuration (if appropriate)
- Power management configuration (if appropriate)
It would likely be fairly easy to port Tock to another ARM Cortex M (specifically the M0+, M23, M4F, or M7) or another rv32i variant. It will probably be more work to port Tock to other architectures. While we aim to be architecture agnostic, this has only been tested on a small number of architectures.
If you are interested in porting Tock to a new architecture, it's likely best to reach out to us via email or Slack before digging in too deep.
chip Crate
The chip crate is specific to a particular microcontroller, but should attempt
to be general towards a family of microcontrollers. For example, support for the
nRF58240 and nRF58230 microcontrollers is shared in the chips/nrf52 and
chips/nrf5x crates. This helps reduce duplicated code and simplifies adding
new specific microcontrollers.
The chip crate contains microcontroller-specific implementations of the
interfaces defined in kernel/src/hil.
Chips have a lot of features and Tock supports a large number of interfaces to express them. Build up the implementation of a new chip incrementally. Get reset and initialization code working. Set it up to run on the chip's default clock and add a GPIO interface. That's a good point to put together a minimal board that uses the chip and validate with an end-to-end userland application that uses GPIOs.
Once you have something small like GPIOs working, it's a great time to open a pull request to Tock. This lets others know about your efforts with this chip and can hopefully attract additional support. It also is a chance to get some feedback from the Tock core team before you have written too much code.
Moving forward, chips tend to break down into reasonable units of work.
Implement something like kernel::hil::UART for your chip, then submit a pull
request. Pick a new peripheral and repeat!
Historically, Tock chips defined peripherals as static mut global variables,
which made them easy to access but encouraged use of unsafe code and prevented
boards from instantiating only the set of peripherals they needed. Now,
peripherals are instantiated at runtime in main.rs, which resolves these
issues. To prevent each board from having to instantiate peripherals
individually, chips should provide a ChipNameDefaultPeripherals struct that
defines and creates all peripherals available for the chip in Tock. This will be
used by upstream boards using the chip, without forcing the overhead and code
size of all peripherals on more minimal out-of-tree boards.
Tips and Tools
- Using System View Description (SVD) files for specific microcontrollers can
help with setting up the register mappings for individual peripherals. See the
tools/svd2regs.pytool (./svd2regs.py -h) for help with automatically generating the register mappings.
board Crate
The board crate, in boards/src, is specific to a physical hardware platform.
The board file essentially configures the kernel to support the specific
hardware setup. This includes instantiating drivers for sensors, mapping
communication buses to those sensors, configuring GPIO pins, etc.
Tock is leveraging "components" for setting up board crates. Components are contained structs that include all of the setup code for a particular driver, and only require boards to pass in the specific options that are unique to the particular platform. For example:
#![allow(unused)] fn main() { let isl29035 = components::isl29035::Isl29035Component::new(sensors_i2c, mux_alarm) .finalize(components::isl29035_component_static!(sam4l::ast::Ast)); let ambient_light = components::isl29035::AmbientLightComponent::new( board_kernel, capsules::ambient_light::DRIVER_NUM, isl29035, ) .finalize(components::ambient_light_component_static!()); }
instantiates the components for a specific light sensor (the ISL29035) and for
an ambient light sensor interface for userspace. Board initiation should be
largely done using components, but not all components have been created yet, so
board files are generally a mix of components and verbose driver instantiation.
The best bet is to start from an existing board's main.rs file and adapt it.
Initially, you will likely want to delete most of the capsules and add them
slowly as you get things working.
Warning:
[capsule name]_component_static!()macros are singletons, and must not be called in a loop or within a function. These macros should instead be instantiated directly inmain().
Component Creation
Creating a component for a capsule has two main benefits: 1) all subtleties and any complexities with setting up the capsule can be contained in the component, reducing the chance for error when using the capsule, and 2) the details of instantiating a capsule are abstracted from the high-level setup of a board. Therefore, Tock encourages boards to use components for their main startup process.
Basic components generally have a structure like the following simplified
example for a Console component:
#![allow(unused)] fn main() { use core::mem::MaybeUninit; /// Helper macro that calls `static_buf!()`. This helps allow components to be /// instantiated multiple times. #[macro_export] macro_rules! console_component_static { () => {{ let console = kernel::static_buf!(capsules::console::Console<'static>); console }}; } /// Main struct that represents the component. This should contain all /// configuration and resources needed to instantiate this capsule. pub struct ConsoleComponent { uart: &'static capsules::virtual_uart::UartDevice<'static>, } impl ConsoleComponent { /// The constructor for the component where the resources and configuration /// are provided. pub fn new( uart: &'static capsules::virtual_uart::UartDevice, ) -> ConsoleComponent { ConsoleComponent { uart, } } } impl Component for ConsoleComponent { /// The statically defined (using `static_buf!()`) structures where the /// instantiated capsules will actually be stored. type StaticInput = &'static mut MaybeUninit<capsules::console::Console<'static>>; /// What will be returned to the user of the component. type Output = &'static capsules::console::Console<'static>; /// Initializes and configures the capsule. unsafe fn finalize(self, s: Self::StaticInput) -> Self::Output { /// Call `.write()` on the static buffer to set its contents with the /// constructor from the capsule. let console = s.write(console::Console::new(self.uart)); /// Set any needed clients or other configuration steps. hil::uart::Transmit::set_transmit_client(self.uart, console); hil::uart::Receive::set_receive_client(self.uart, console); /// Return the static reference to the newly created capsule object. console } } }
Using a basic component like this console example looks like:
#![allow(unused)] fn main() { // in main.rs: let console = ConsoleComponent::new(uart_device) .finalize(components::console_component_static!()); }
When creating components, keep the following steps in mind:
-
All static buffers needed for the component MUST be created using
static_buf!()inside of a macro, and nowhere else. This is necessary to help allow components to be used multiple times (for example if a board has two temperature sensors). Because the samestatic_buf!()call cannot be executed multiple times,static_buf!()cannot be placed in a function, and must be called directly from main.rs. To preserve the ergonomics of components, we wrap the call tostatic_buf!()in a macro, and call the macro from main.rs instead ofstatic_buf!()directly.The naming convention of the macro that wraps
static_buf!()should be[capsule name]_component_static!()to indicate this is where the static buffers are created. The macro should only create static buffers. -
All configuration and resources not related to static buffers should be passed to the
new()constructor of the component object.
Finally, some capsules and resources are templated over chip-specific resources. This slightly complicates defining the static buffers for certain capsules. To ensure that components can be re-used across different boards and microcontrollers, components use the same macro strategy for other static buffers.
#![allow(unused)] fn main() { use core::mem::MaybeUninit; #[macro_export] macro_rules! alarm_mux_component_static { ($A: ty) => {{ let alarm = kernel::static_buf!(capsules::virtual_alarm::MuxAlarm<'static, $A>); alarm }}; } pub struct AlarmMuxComponent<A: 'static + time::Alarm<'static>> { alarm: &'static A, } impl<A: 'static + time::Alarm<'static>> AlarmMuxComponent<A> { pub fn new(alarm: &'static A) -> AlarmMuxComponent<A> { AlarmMuxComponent { alarm } } } impl<A: 'static + time::Alarm<'static>> Component for AlarmMuxComponent<A> { type StaticInput = &'static mut MaybeUninit<capsules::virtual_alarm::MuxAlarm<'static, A>>; type Output = &'static MuxAlarm<'static, A>; unsafe fn finalize(self, s: Self::StaticInput) -> Self::Output { let mux_alarm = s.write(MuxAlarm::new(self.alarm)); self.alarm.set_alarm_client(mux_alarm); mux_alarm } } }
Here, the alarm_mux_component_static!() macro needs the type of the underlying
alarm hardware. The usage looks like:
#![allow(unused)] fn main() { let mux_alarm = components::alarm::AlarmMuxComponent::new(&peripherals.ast) .finalize(components::alarm_mux_component_static!(sam4l::ast::Ast)); }
Board Support
In addition to kernel code, boards also require some support files. These specify metadata such as the board name, how to load code onto the board, and anything special that userland applications may need for this board.
panic!s (aka io.rs)
Each board must author a custom routine to handle panic!s. Most panic!
machinery is handled by the Tock kernel, but the board author must provide some
minimalist access to hardware interfaces, specifically LEDs and/or UART.
As a first step, it is simplest to just get LED-based panic! working. Have
your panic! handler set up a prominent LED and then call
kernel::debug::panic_blink_forever.
If UART is available, the kernel is capable of printing a lot of very helpful
additional debugging information. However, as we are in a panic! situation,
it's important to strip this down to a minimalist implementation. In particular,
the supplied UART must be synchronous (note that this in contrast to the rest of
the kernel UART interfaces, which are all asynchronous). Usually implementing a
very simple Writer that simply writes one byte at a time directly to the UART
is easiest/best. It is not important that panic! UART writer be efficient. You
can then replace the call to
kernel::debug::panic_blink_forever
with a call to
kernel::debug::panic.
For largely historical reasons, panic implementations for all boards live in a
file named io.rs adjacent to the board's main.rs file.
Board Cargo.toml, build.rs
Every board crate must author a top-level manifest, Cargo.toml. In general,
you can probably simply copy this from another board, modifying the board name
and author(s) as appropriate.
Note that Tock also provides a build script, boards/build.rs, that you should
add to your Cargo.toml manifest. The build script simply adds a dependency on
any link scripts to ensure the board is rebuilt when any changes.
Board Makefile
There is a Makefile in the root of every board crate, at a minimum, the board Makefile must include:
# Makefile for building the tock kernel for the Hail platform
TARGET=thumbv7em-none-eabi # Target triple
PLATFORM=hail # Board name here
include ../Makefile.common # ../ assumes board lives in $(TOCK)/boards/<board>
Tock provides boards/Makefile.common that drives most of the build system. In
general, you should not need to dig into this Makefile -- if something doesn't
seem to be working, hop on slack and ask.
Getting the built kernel onto a board
In addition to building the kernel, the board Makefile should include rules for getting code onto the board. This will naturally be fairly board-specific, but Tock does have two targets normally supplied:
make program: For "plug-'n-plug" loading. Usually these are boards with a bootloader or some other support IC. The expectation is that during normal operation, a user could simply plug in a board and typemake programto load code.make flash: For "more direct" loading. Usually this means that a JTAG or some equivalent interface is being used. Often it implies that external hardware is required, though some of the development kit boards have an integrated JTAG on-board, so external hardware is not a hard and fast rule.make install: This should be an alias to eitherprogramorflash, whichever is the preferred approach for this board.
If you don't support program or flash, you should define an empty rule that explains how to program the board:
.PHONY: program
echo "To program, run SPEICAL_COMMAND"
exit 1
Board README
Every board must have a README.md file included in the top level of the crate.
This file must:
- Provide links to information about the platform and how to purchase/acquire the platform. If there are different versions of the platform the version used in testing should be clearly specified.
- Include an overview on how to program the hardware, including any additional dependencies that are required.
Loading Apps
Ideally, Tockloader will support loading apps on to your board (perhaps with some flags set to specific values). If that is not the case, please create an issue on the Tockloader repo so we can update the tool to support loading code onto your board.
Common Pitfalls
- Make sure you are careful when setting up the board
main.rsfile. In particular, it is important to ensure that all of the requiredset_clientfunctions for capsules are called so that callbacks are not lost. Forgetting these often results in the platform looking like it doesn't do anything.
Adding a Platform to Tock Repository
After creating a new platform, we would be thrilled to have it included in mainline Tock. However, Tock has a few guidelines for the minimum requirements of a board that is merged into the main Tock repository:
- The hardware must be widely available. Generally that means the hardware platform can be purchased online.
- The port of Tock to the platform must include at least:
Consolesupport so thatdebug!()andprintf()work.- Timer support.
- GPIO support with interrupt functionality.
- The contributor must be willing to maintain the platform, at least initially, and help test the platform for future releases.
With these requirements met we should be able to merge the platform into Tock relatively quickly. In the pull request to add the platform, you should add this checklist:
### New Platform Checklist
- [ ] Hardware is widely available.
- [ ] I can support the platform, which includes release testing for the
platform, at least initially.
- Basic features are implemented:
- [ ] `Console`, including `debug!()` and userspace `printf()`.
- [ ] Timers.
- [ ] GPIO with interrupts.
Porting Tock 1.x Capsules to Tock 2.0
This guide covers how to port Tock capsules from the 1.x system call API to the 2.x system call API. It outlines how the API has changed and gives code examples.
Overview
Version 2 of the Tock operating system changes the system call API and ABI in several ways. This document describes the changes and their implications to capsule implementations. It gives guidance on how to port a capsule from Tock 1.x to 2.0.
Tock 2.0 System Call API
The Tock system call API is implemented in the Driver trait. Tock 2.0 updates
this trait to be more precise and correctly support Rust's memory semantics.
SyscallDriver
This is the signature for the 2.0 Driver trait:
#![allow(unused)] fn main() { pub trait SyscallDriver { fn command(&self, which: usize, r2: usize, r3: usize, caller_id: ProcessId) -> CommandResult { CommandResult::failure(ErrorCode::NOSUPPORT) } fn allow_readwrite( &self, process_id: ProcessId, allow_num: usize, buffer: ReadWriteProcessBuffer, ) -> Result<ReadWriteProcessBuffer, (ReadWriteProcessBuffer, ErrorCode)> { Err((slice, ErrorCode::NOSUPPORT)) } fn allow_readonly( &self, process_id: ProcessId, allow_num: usize, buffer: ReadOnlyProcessBuffer, ) -> Result<ReadOnlyProcessBuffer, (ReadOnlyProcessBuffer, ErrorCode)> { Err((slice, ErrorCode::NOSUPPORT)) } fn allocate_grant(&self, processid: ProcessId) -> Result<(), crate::process::Error>; } }
The first thing to note is that there are now two versions of the old allow
method: one for a read/write buffer and one for a read-only buffer. They pass
different types of slices.
The second thing to note is that the two methods that pass pointers,
allow_readwrite and allow_readonly, return a Result. The success case
(Ok) returns a pointer back in the form of an application slice. The failure
case (Err) returns the same structure back but also has an ErrorCode.
These two methods follow a swapping calling convention: you pass in a pointer
and get one back. If the call fails, you get back the one you passed in. If the
call succeeds, you get back the one the capsule previously had. That is, you
call allow_readwrite with an application slice A and it succeeds, then the
next successful call to allow_readwrite will return A.
These swapping semantics allow the kernel to maintain an invariant that there is
only one instance of a particular application slice at any time. Since an
application slice represents a region of application memory, having two objects
representing the same region of memory violates Rust's memory guarantees. When
the scheduler calls allow_readwrite, allow_readonly or subscribe, it moves
the application slice or callback into the capsule. The capsule, in turn, moves
the previous one out.
The command method behaves differently, because commands only operate on
values, not pointers. Each command has its own arguments and number of return
types. This is encapsulated within CommandResult.
The third thing to note is that there is no longer a subscribe() method. This
has been removed and instead all upcalls are managed entirely by the kernel.
Scheduling an upcall is now done with a provided object from entering a grant.
The fourth thing to note is the new allocate_grant() method. This allows the
kernel to request that a capsule enters its grant region so that it is allocated
for the specific process. This should be implemented with a roughly boilerplate
implementation described below.
Porting Capsules and Example Code
The major change you'll see in porting your code is that capsule logic becomes
simpler: Options have been replaced by structures, and there's a basic
structure to swapping application slices.
Examples of command and CommandResult
The LED capsule implements only commands, so it provides a very simple example of what commands look like.
#![allow(unused)] fn main() { fn command(&self, command_num: usize, data: usize, _: usize, _: ProcessId) -> CommandResult { self.leds .map(|leds| { match command_num { ... // on 1 => { if data >= leds.len() { CommandResult::failure(ErrorCode::INVAL) /* led out of range */ } else { leds[data].on(); CommandResult::success() } }, }
The capsule dispatches on the command number. It uses the first argument,
data, as which LED to turn activate. It then returns either a
CommandResult::Success (generated with CommandResult::success()) or a
CommandResult::Failure (generated with CommandResult::failure()).
A CommandResult is a wrapper around a GenericSyscallReturnValue,
constraining it to the versions of GenericSyscallReturnValue that can be
returned by a command.
Here is a slightly more complex implementation of Command, from the console
capsule.
#![allow(unused)] fn main() { fn command(&self, cmd_num: usize, arg1: usize, _: usize, processid: ProcessId) -> CommandResult{ let res = match cmd_num { 0 => Ok(Ok(())), 1 => { // putstr let len = arg1; self.apps.enter(processid, |app, _| { self.send_new(processid, app, len) }).map_err(ErrorCode::from) }, 2 => { // getnstr let len = arg1; self.apps.enter(processid, |app, _| { self.receive_new(processid, app, len) }).map_err(ErrorCode::from) }, 3 => { // Abort RX self.uart.receive_abort(); Ok(Ok(())) } _ => Err(ErrorCode::NOSUPPORT) }; match res { Ok(r) => { CommandResult::from(r), }, Err(e) => CommandResult::failure(e) } } }
This implementation is more complex because it uses a grant region that stores
per-process state. Grant::enter returns a
Result<Result<(), ErrorCode>, grant::Error>. An outer Err return type means
the grant could not be entered successfully and the closure was not invoked:
this returns what grant error occurred. An Ok return type means the closure
was executed, but it is possible that an error occurred during its execution. So
there are three cases:
Ok(Ok(()))Ok(Err(ErrorCode:: error cases))Err(grant::Error)
The bottom match statement separates these two. In the Ok() case, it checks
whether the inner Result contains an Err(ErrorCode). If not (Err), this
means it was a success, and the result was a success, so it returns a
CommandResult::Success. If it can be converted into an error code, or if the
grant produced an error, it returns a CommandResult::Failure.
One of the requirements of commands in 2.0 is that each individual command_num
have a single failure return type and a single success return size. This means
that for a given command_num, it is not allowed for it to sometimes return
CommandResult::Success and other times return Command::SuccessWithValue, as
these are different sizes. As part of easing this transition, Tock 2.0 removed
the SuccessWithValue variant of ReturnCode, and then later in the transition
removed ReturnCode entirely, replacing all uses of ReturnCode with
Result<(), ErrorCode>.
If, while porting, you encounter a construction of
ReturnCode::SuccessWithValue{v} in command() for an out-of-tree capsule,
replace it with a construction of CommandResult::success_u32(v), and make sure
that it is impossible for that command_num to return CommandResult::Success in
any other scenario.
ReturnCode versus ErrorCode
Because the new system call ABI explicitly distinguishes failures and successes,
it replaces ReturnCode with ErrorCode to denote which error in failure
cases. ErrorCode is simply ReturnCode without any success cases, and with
names that remove the leading E since it's obvious they are an error:
ErrorCode::FAIL is the equivalent of ReturnCode::EFAIL. ReturnCode is
still used in the kernel, but may be deprecated in time.
Examples of allow_readwrite and allow_readonly
Because ReadWriteProcessBuffer and ReadOnlyProcessBuffer represent access to
userspace memory, the kernel tightly constrains how these objects are
constructed and passed. They do not implement Copy or Clone, so only one
instance of these objects exists in the kernel at any time.
Note that console has one ReadOnlyProcessBuffer for printing/putnstr and
one ReadWriteProcessBuffer for reading/getnstr. Here is a sample
implementation of allow_readwrite for the console capsule:
#![allow(unused)] fn main() { pub struct App { write_buffer: ReadOnlyProcessBuffer, ... fn allow_readonly( &self, process_id: ProcessId, allow_num: usize, mut buffer: ReadOnlyProcessBuffer, ) -> Result<ReadOnlyProcessBuffer, (ReadOnlyProcessBuffer, ErrorCode)> { let res = match allow_num { 1 => self .apps .enter(processid, |process_id, _| { mem::swap(&mut process_id.write_buffer, &mut buffer); }) .map_err(ErrorCode::from), _ => Err(ErrorCode::NOSUPPORT), }; if let Err(e) = res { Err((slice, e)) } else { Ok(slice) } } }
The implementation is quite simple: if there is a valid grant region, the method
swaps the passed ReadOnlyProcessBuffer and the one in the App region,
returning the one that was in the app region. It then returns slice, which is
either the passed slice or the swapped out one.
The new subscription mechanism
Tock 2.0 introduces a guarantee for the subscribe syscall that for every unique
subscribe (i.e. (driver_num, subscribe_num) tuple), userspace will be returned
the previously subscribe upcall (or null if this is the first subscription).
This guarantee means that once an upcall is returned, the kernel will never
schedule the upcall again (unless it is re-subscribed in the future), and
userspace can deallocate the upcall function if it so chooses.
Providing this guarantee necessitates changes to the capsule interface for
declaring and using upcalls. To declare upcalls, a capsule now provides the
number of upcalls as a templated value on Grant.
#![allow(unused)] fn main() { struct capsule { ... apps: Grant<T, NUM_UPCALLS>, ... } }
The second parameter tells the kernel how many upcalls to save. Capsules no
longer can store an object of type Upcall in their grant region.
To ensure that the kernel can store the upcalls, a capsule must implement the
allocate_grant() method. The typical implementation looks like:
#![allow(unused)] fn main() { fn allocate_grant(&self, processid: ProcessId) -> Result<(), kernel::procs::Error> { self.apps.enter(processid, |_, _| {}) } }
Finally to schedule an upcall any calls to app.upcall.schedule() should be
replaced with code like:
#![allow(unused)] fn main() { self.apps.enter(processid, |app, upcalls| { upcalls.schedule_upcall(upcall_number, (r0, r1, r2)); }); }
The parameter upcall_number matches the subscribe_num the process used with
the subscribe syscall.
Using ReadOnlyProcessBuffer and ReadWriteProcessBuffer: console
One key change in the Tock 2.0 API is explicitly acknowledging that application slices may disappear at any time. For example, if a process passes a slice into the kernel, it can later swap it out with a later allow call. Similarly, application grants may disappear at any time.
This means that ReadWriteProcessBuffer and ReadOnlyProcessBuffer now do not
allow you to obtain their pointers and lengths. Instead, they provide a map_or
method. This is how console uses this, for example, to copy process data into
its write buffer and call the underlying transmit_buffer:
#![allow(unused)] fn main() { fn send(&self, process_id: ProcessId, app: &mut App) { if self.tx_in_progress.is_none() { self.tx_in_progress.set(process_id); self.tx_buffer.take().map(|buffer| { let len = app.write_buffer.map_or(0, |data| data.len()); if app.write_remaining > len { // A slice has changed under us and is now smaller than // what we need to write -- just write what we can. app.write_remaining = len; } let transaction_len = app.write_buffer.map_or(0, |data| { for (i, c) in data[data.len() - app.write_remaining..data.len()] .iter() .enumerate() { if buffer.len() <= i { return i; } buffer[i] = *c; } app.write_remaining }); app.write_remaining -= transaction_len; let (_err, _opt) = self.uart.transmit_buffer(buffer, transaction_len); }); } else { app.pending_write = true; } } }
Note that the implementation looks at the length of the slice: it doesn't copy it out into grant state. If a slice was suddenly truncated, it checks and adjust the amount it has written.
Using ReadOnlyProcessBuffer and ReadWriteProcessBuffer: spi_controller
This is a second example, taken from spi_controller. Because SPI transfers are
bidirectional, there is an RX buffer and a TX buffer. However, a client can
ignore what it receives, and only pass a TX buffer if it wants: the RX buffer
can be zero length. As with other bus transfers, the SPI driver needs to handle
the case when its buffers change in length under it. For example, a client may
make the following calls:
allow_readwrite(rx_buf, 200)allow_readonly(tx_buf, 200)command(SPI_TRANSFER, 200)- (after some time, while transfer is ongoing)
allow_readonly(tx_buf2, 100)
Because the underlying SPI tranfer typically uses DMA, the buffer passed to the
peripheral driver is static. The spi_controller has fixed-size static
buffers. It performs a transfer by copying application slice data into/from
these buffers. A very long application transfer may be broken into multiple
low-level transfers.
If a transfer is smaller than the static buffer, it is simple: spi_controller
copies the application slice data into its static transmit buffer and starts the
transfer. If the process rescinds the buffer, it doesn't matter, as the capsule
has the data. Similarly, the presence of a receive application slice only
matters when the transfer completes, and the capsule decides whether to copy
what it received out.
The principal complexity is when the buffers change during a low-level transfer and then the capsule needs to figure out whether to continue with a subsequent low-level transfer or finish the operation. The code needs to be careful to not access past the end of a slice and cause a kernel panic.
The code looks like this:
#![allow(unused)] fn main() { // Assumes checks for busy/etc. already done // Updates app.index to be index + length of op fn do_next_read_write(&self, app: &mut App) { let write_len = self.kernel_write.map_or(0, |kwbuf| { let mut start = app.index; let tmp_len = app.app_write.map_or(0, |src| { let len = cmp::min(app.len - start, self.kernel_len.get()); let end = cmp::min(start + len, src.len()); start = cmp::min(start, end); for (i, c) in src.as_ref()[start..end].iter().enumerate() { kwbuf[i] = *c; } end - start }); app.index = start + tmp_len; tmp_len }); self.spi_master.read_write_bytes( self.kernel_write.take().unwrap(), self.kernel_read.take(), write_len, ); } }
The capsule keeps track of its current write position with app.index. This
points to the first byte of untransmitted data. When a transfer starts in
response to a system call, the capsule checks that the requested length of the
transfer is not longer than the length of the transmit buffer, and also that the
receive buffer is either zero or at least as long. The total length of a
transfer is stored in app.len.
But if the transmit buffer is swapped during a transfer, it may be shorter than
app.index. In the above code, the variable len stores the desired length of
the low-level transfer: it's the minimum of data remaining in the transfer and
the size of the low-level static buffer. The variable end stores the index of
the last byte that can be safely transmitted: it is the minimum of the low-level
transfer end (start + len) and the length of the application slice
(src.len()). Note that end can be smaller than start if the application
slice is shorter than the current write position. To handle this case, start
is set to be the minimum of start and end: the transfer will be of length
zero.
VSCode Debugging
This is a guide on how to perform remote debugging via JTAG in Tock using VSCode (at the moment (Feb 2018) nRF51-DK and nRF52-DK are supported).
Requirements
Installation
- Install VSCode for your platform
- Open VSCode
- Enter the extensions menu by pressing
View/Extensions - Install
Native DebugandRustin that view by searching for them
You are now good to run the debugger and the debugging configurations are already set for you. But, if you want change the configuration, for example to run some special GDB commands before starting, you can do that here.
Enabling breakpoints
Let's now test if this works by configuring some breakpoints:
-
Enter
Explorer modeby pressingView/Explorer -
Browse and open a file where you want to enable a breakpoint
-
In my case I want to have a breakpoint in the
mainin main.rs -
Click to the left of the line number to enable a breakpoint. You should see a red dot now as the figure below:

Running the debugger
-
You need to start the
GDB Serverbefore launching a debugging session in VSCode (check out the instructions for how to do that for your board). -
Enter
Debug modein VSCode by pressingView/Debug. You should now see a debug view somewhere on your screen as in the figure below:
-
Choose your board in the scroll bar and then click on the green arrow or
Debug/Start Debugging. -
You should now see that program stopped at the breakpoint as the figure below:
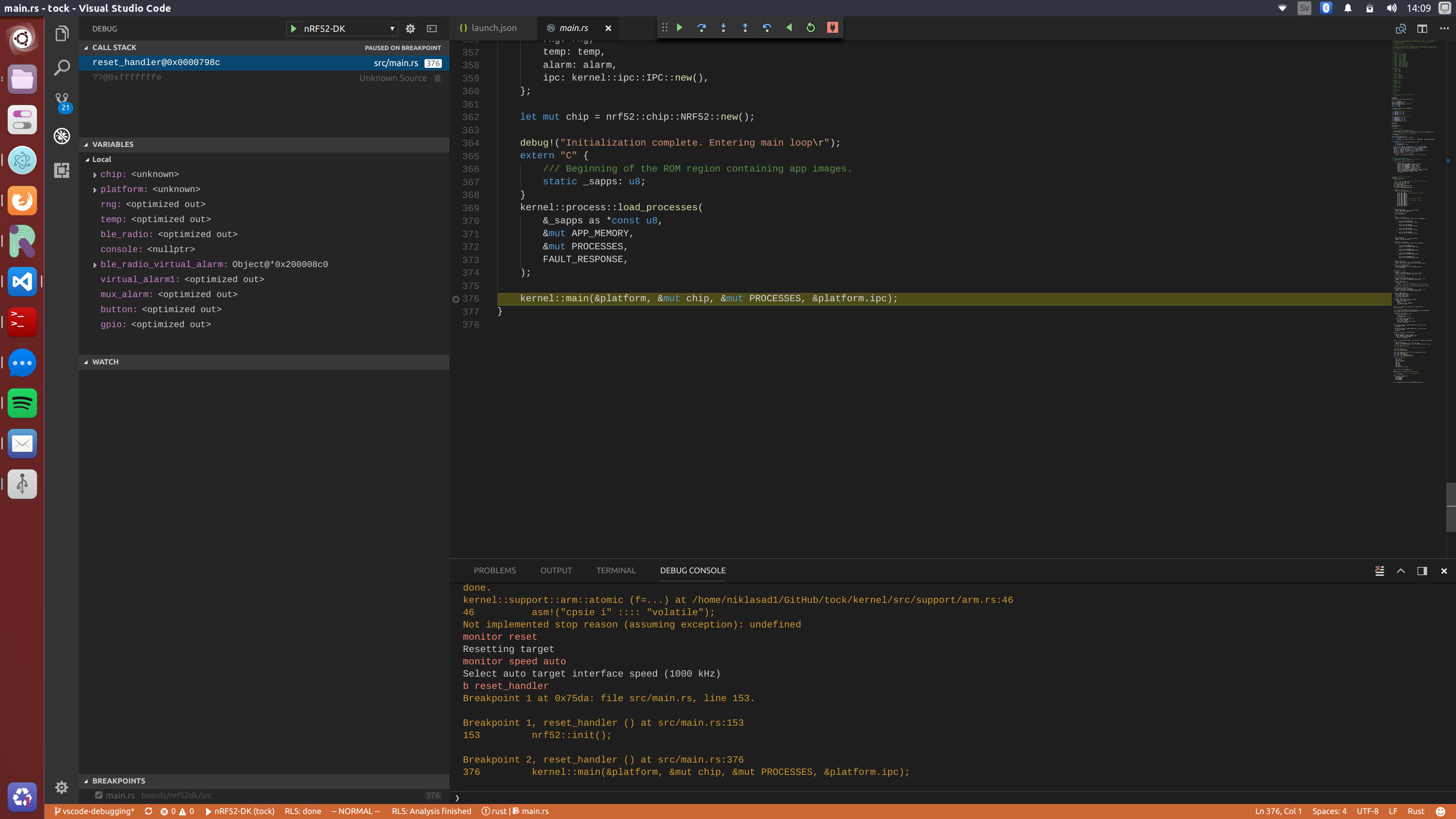
-
Finally, if want to use specific GDB commands you can use the debug console in VSCode which is very useful.
Issues
-
Sometimes GDB behaves unpredictably and stops at the wrong source line. For example, sometimes we have noticed that debugger stops at
/kernel/src/support/arm.rsinstead of themain. If that occurs just pressstep overand it should hopefully jump to correct location. -
Rust in
release modeis optimizing using things such as inlining and mangling which makes debugging harder and values may not be visible. To perform more reliable debugging mark the important functions with:#[no_mangle] #[inline(never)] -
Enable
rust-pretty printeror something similar because viewing variables is very limited in VSCode.
Kernel Documentation
This portion of the Tock Book describes details of the design and structure of the Tock kernel.
For API-level documentation, view the rustdocs.
Tock Overview
Tock is a secure, embedded operating system for Cortex-M and RISC-V microcontrollers. Tock assumes the hardware includes a memory protection unit (MPU), as systems without an MPU cannot simultaneously support untrusted processes and retain Tock's safety and security properties. The Tock kernel and its extensions (called capsules) are written in Rust.
Tock can run multiple, independent untrusted processes written in any language. The number of processes Tock can simultaneously support is constrained by MCU flash and RAM. Tock can be configured to use different scheduling algorithms, but the default Tock scheduler is preemptive and uses a round-robin policy. Tock uses a microkernel architecture: complex drivers and services are often implemented as untrusted processes, which other processes, such as applications, can invoke through inter-process commmunication (IPC).
This document gives an overview of Tock's architecture, the different classes of code in Tock, the protection mechanisms it uses, and how this structure is reflected in the software's directory structure.
Tock Architecture
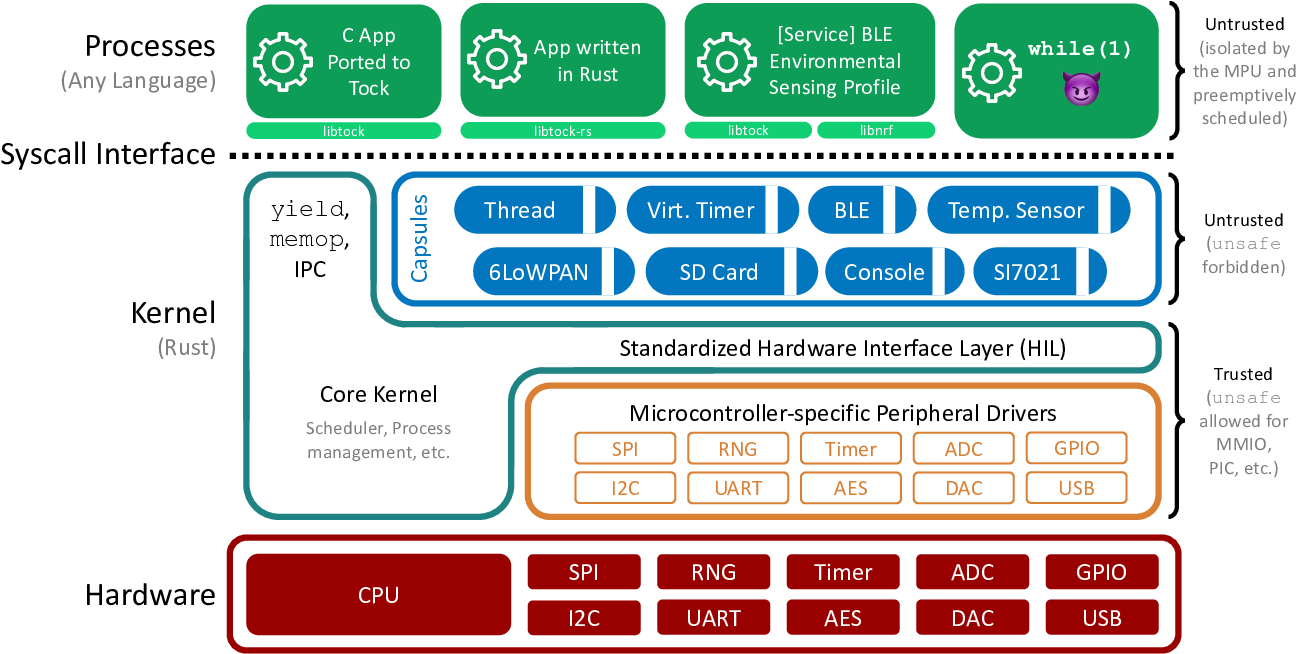
The above Figure shows Tock's architecture. Code falls into one of three categories: the core kernel, capsules, and processes.
The core kernel and capsules are both written in Rust. Rust is a type-safe systems language; other documents discuss the language and its implications to kernel design in greater detail, but the key idea is that Rust code can't use memory differently than intended (e.g., overflow buffers, forge pointers, or have pointers to dead stack frames). Because these restrictions prevent many things that an OS kernel has to do (such as access a peripheral that exists at a memory address specified in a datasheet), the very small core kernel is allowed to break them by using "unsafe" Rust code. Capsules, however, cannot use unsafe features. This means that the core kernel code is very small and carefully written, while new capsules added to the kernel are safe code and so do not have to be trusted.
Processes can be written in any language. The kernel protects itself and other processes from bad process code by using a hardware memory protection unit (MPU). If a process tries to access memory it's not allowed to, this triggers an exception. The kernel handles this exception and kills the process.
The kernel provides four major system calls:
- command: makes a call from the process into the kernel
- subscribe: registers a callback in the process for an upcall from the kernel
- allow: gives kernel access to memory in the process
- yield: suspends process until after a callback is invoked
Every system call except yield is non-blocking. Commands that might take a long time (such as sending a message over a UART) return immediately and issue a callback when they complete. The yield system call blocks the process until a callback is invoked; userland code typically implements blocking functions by invoking a command and then using yield to wait until the callback completes.
The command, subscribe, and allow system calls all take a driver ID as their first parameter. This indicates which driver in the kernel that system call is intended for. Drivers are capsules that implement the system call.
Tock Design
Most operating systems provide isolation between components using a process-like abstraction: each component is given its own slice of the system memory (for its stack, heap, data) that is not accessible by other components. Processes are great because they provide a convenient abstraction for both isolation and concurrency. However, on resource-limited systems, like microcontrollers with much less than 1MB of memory, this approach leads to a trade-off between isolation granularity and resource consumption.
Tock's architecture resolves this trade-off by using a language sandbox to isolated components and a cooperative scheduling model for concurrency in the kernel. As a result, isolation is (more or less) free in terms of resource consumption at the expense of preemptive scheduling (so a malicious component could block the system by, e.g., spinning in an infinite loop).
To first order, all components in Tock, including those in the kernel, are mutually distrustful. Inside the kernel, Tock achieves this with a language-based isolation abstraction called capsules that incurs no memory or computation overhead. In user-space, Tock uses (more-or-less) a traditional process model where process are isolated from the kernel and each other using hardware protection mechanisms.
In addition, Tock is designed with other embedded systems-specific goals in mind. Tock favors overall reliability of the system and discourages components (prevents when possible) from preventing system progress when buggy.
Architecture
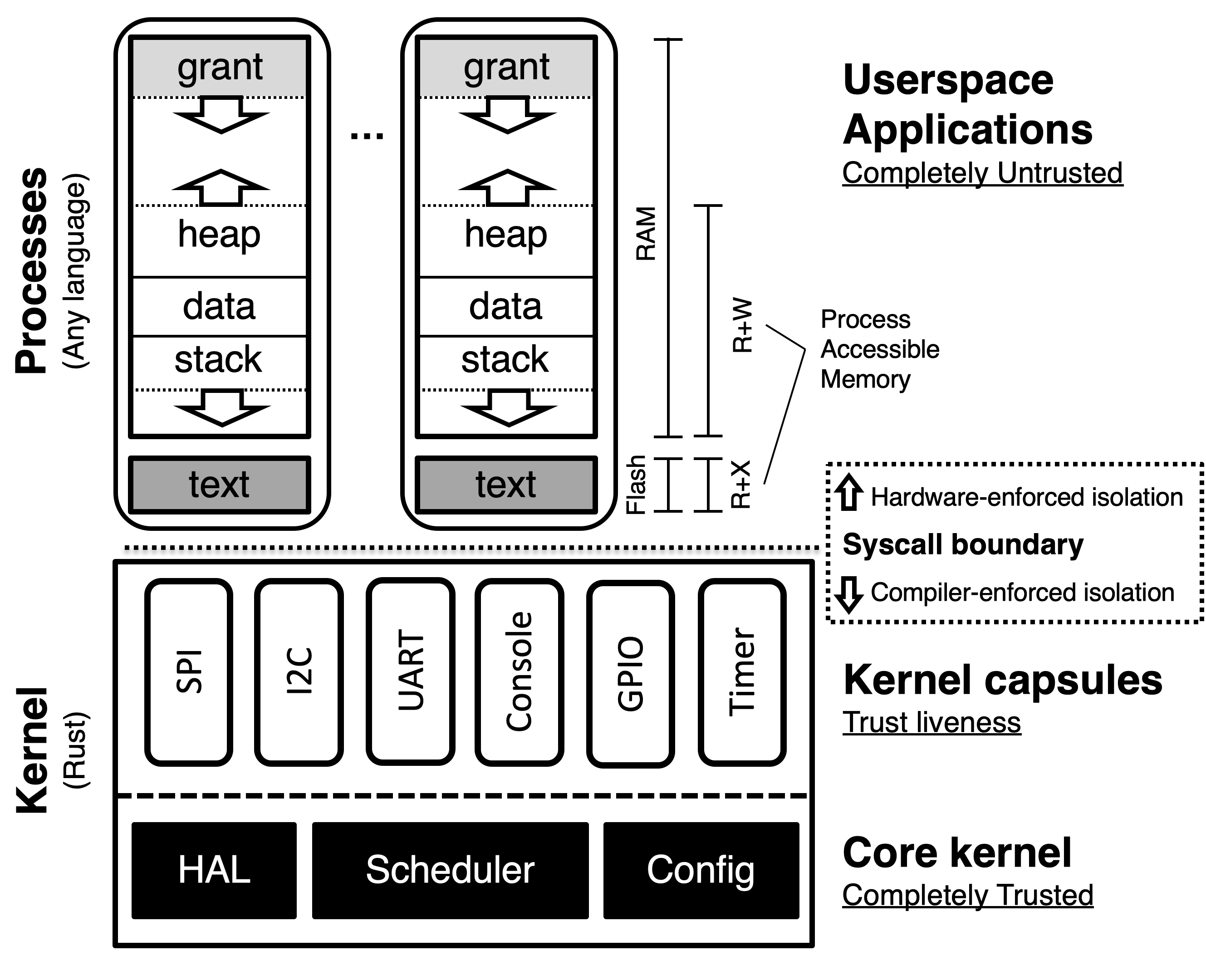
Tock includes three architectural components: a small trusted kernel, written in Rust, which implements a hardware abstraction layer (HAL); scheduler; and platform-specific configuration. Other system components are implemented in one of two protection mechanisms: capsules, which are compiled with the kernel and use Rust’s type and module systems for safety, and processes, which use the MPU for protection at runtime.
System components (an application, driver, virtualization layer, etc.) can be implemented in either a capsule or process, but each mechanism trades off concurrency and safety with memory consumption, performance, and granularity.
| Category | Capsule | Process |
|---|---|---|
| Protection | Language | Hardware |
| Memory Overhead | None | Separate stack |
| Protection Granularity | Fine | Coarse |
| Concurrency | Cooperative | Preemptive |
| Update at Runtime | No | Yes |
As a result, each is more appropriate for implementing different components. In general, drivers and virtualization layers are implemented as capsules, while applications and complex drivers using existing code/libraries, such as networking stacks, are implemented as processes.
Capsules
A capsule is a Rust struct and associated functions. Capsules interact with each other directly, accessing exposed fields and calling functions in other capsules. Trusted platform configuration code initializes them, giving them access to any other capsules or kernel resources they need. Capsules can protect internal state by not exporting certain functions or fields.
Capsules run inside the kernel in privileged hardware mode, but Rust’s type and module systems protect the core kernel from buggy or malicious capsules. Because type and memory safety are enforced at compile-time, there is no overhead associated with safety, and capsules require minimal error checking. For example, a capsule never has to check the validity of a reference. If the reference exists, it points to valid memory of the right type. This allows extremely fine-grained isolation since there is virtually no overhead to splitting up components.
Rust’s language protection offers strong safety guarantees. Unless a capsule is able to subvert the Rust type system, it can only access resources explicitly granted to it, and only in ways permitted by the interfaces those resources expose. However, because capsules are cooperatively scheduled in the same single-threaded event loop as the kernel, they must be trusted for system liveness. If a capsule panics, or does not yield back to the event handler, the system can only recover by restarting.
Processes
Processes are independent applications that are isolated from the kernel and run with reduced privileges in separate execution threads from the kernel. The kernel schedules processes preemptively, so processes have stronger system liveness guarantees than capsules. Moreover, uses hardware protection to enforce process isolation at runtime. This allows processes to be written in any language and to be safely loaded at runtime.
Memory Layout
Processes are isolated from each other, the kernel, and the underlying hardware explicitly by the hardware Memory Protection Unit (MPU). The MPU limits which memory addresses a process can access. Accesses outside of a process's permitted region result in a fault and trap to the kernel.
Code, stored in flash, is made accessible with a read-only memory protection region. Each process is allocated a contiguous region of RAM. One novel aspect of a process is the presence of a "grant" region at the top of the address space. This is memory allocated to the process covered by a memory protection region that the process can neither read nor write. The grant region, discussed below, is needed for the kernel to be able to borrow memory from a process in order to ensure liveness and safety in response to system calls.
Grants
Capsules are not allowed to allocate memory dynamically since dynamic allocation in the kernel makes it hard to predict if memory will be exhausted. A single capsule with poor memory management could cause the rest of the kernel to fail. Moreover, since it uses a single stack, the kernel cannot easily recover from capsule failures.
However, capsules often need to dynamically allocate memory in response to process requests. For example, a virtual timer driver must allocate a structure to hold metadata for each new timer any process creates. Therefore, Tock allows capsules to dynamically allocate from the memory of a process making a request.
It is unsafe, though, for a capsule to directly hold a reference to process memory. Processes crash and can be dynamically loaded, so, without explicit checks throughout the kernel code, it would not be possible to ensure that a reference to process memory is still valid.
For a capsule to safely allocate memory from a process, the kernel must enforce three properties:
-
Allocated memory does not allow capsules to break the type system.
-
Capsules can only access pointers to process memory while the process is alive.
-
The kernel must be able to reclaim memory from a terminated process.
Tock provides a safe memory allocation mechanism that meets these three requirements through memory grants. Capsules can allocate data of arbitrary type from the memory of processes that interact with them. This memory is allocated from the grant segment.
Just as with buffers passed through allow, references to granted memory are wrapped in a type-safe struct that ensures the process is still alive before dereferencing. Unlike shared buffers, which can only be a buffer type in a capsule, granted memory can be defined as any type. Therefore, processes cannot access this memory since doing so might violate type-safety.
In-Kernel Design Principles
To help meet Tock's goals, encourage portability across hardware, and ensure a sustainable operating system, several design principles have emerged over time for the Tock kernel. These are general principles that new contributions to the kernel should try to uphold. However, these principles have been informed by Tock's development, and will likely continue to evolve as Tock and the Rust ecosystem evolve.
Role of HILs
Generally, the Tock kernel is structured into three layers:
-
Chip-specific drivers: these typically live in a crate in the
chipssubdirectory, or an equivalent crate in an different repository (e.g. the Titan port is out of tree but itsh1bcrate is the equivalent here). These drivers have implementations that are specific to the hardware of a particular microcontroller. Ideally, their implementation is fairly simple, and they merely adhere to a common interface (a HIL). That's not always the case, but that's the ideal. -
Chip-agnostic, portable, peripheral drivers and subsystems. These typically live in the
capsulescrate. These include things like virtual alarms and virtual I2C stack, as well as drivers for hardware peripherals not on the chip itself (e.g. sensors, radios, etc). These drivers typically rely on the chip-specific drivers through the HILs. -
System call drivers, also typically found in the
capsulescrate. These are the drivers that implement a particular part of the system call interfaces, and are often even more abstracted from the hardware than (2) - for example, the temperature sensor system call driver can use any temperature sensor, including several implemented as portable peripheral drivers.The system call interface is another point of standardization that can be implemented in various ways. So it is perfectly reasonable to have several implementations of the same system call interface that use completely different hardware stacks, and therefore HILs and chip-specific drivers (e.g. a console driver that operates over USB might just be implemented as a different system call driver that implements the same system calls, rather than trying to fit USB into the UART HIL).
Because of their importance, the interfaces between these layers are a key part of Tock's design and implementation. These interfaces are called Tock's Hardware Interface Layer, or HIL. A HIL is a portable collection of Rust traits that can be implemented in either a portable or a non-portable way. An example of a non-portable implementation of a HIL is an Alarm that is implemented in terms of counter and compare registers of a specific chip, while an example of a portable implementation is a virtualization layer that multiplexes multiple Alarms top of a single underlying Alarm.
A HIL consists of one or more Rust traits that are intended to be used together. In some cases, implementations may only implement a subset of a HIL's traits. For example the analog-to-digital (ADC) conversion HIL may have traits both for single and streams of samples. A particular implementation may only support single samples and so not implement the streaming traits.
The choice of particular HIL interfaces is pretty important, and we have some general principles we follow:
-
HIL implementations should be fairly general. If we have an interface that doesn't work very well across different hardware, we probably have the wrong interface - it's either too high level, or too low level, or it's just not flexible enough. But HILs shouldn't generally be designed to optimize for particular applications or hardware, and definitely not for a particular combination of applications and hardware. If there are cases where that is really truly necessary, a driver can be very chip or board specific and circumvent the HILs entirely.
Sometimes there are useful interfaces that some chips can provide natively, while other chips lack the necessary hardware support, but the functionality could be emulated in some way. In these cases, Tock sometimes uses "advanced" traits in HILs that enable a chip to expose its more sophisticated features while not requiring that all implementors of the HIL have to implement the function. For example, the UART HIL includes a
ReceiveAdvancedtrait that includes a special functionreceive_automatic()which receives bytes on the UART until a pause between bytes is detected. This is supported directly by the SAM4L hardware, but can also be emulated using timers and GPIO interrupts. By including this in an advanced trait, capsules can still use the interface but other UART implementations that do not have that required feature do not have to implement it. -
A HIL implementation may assume it is the only way the device will be used. As a result, Tock tries to avoid having more than one HIL for a particular service or abstraction, because it will not, in general, be possible for the kernel to support simultaneously using different HILs for the same device. For example, suppose there were two different HILs for a UART with slightly different APIs. The chip-specific implementation of each one will need to read and write hardware registers and handle interrupts, so they cannot exist simultaneously. By allowing a HIL to assume it is the only way the device will be used, Tock allows HILs to precisely define their semantics without having to worry about potential future conflicts or use cases.
Split-phase Operation
While processes are time sliced and preemptive in Tock, the kernel is not. Everything is run-to-completion. That is an important design choice because it allows the kernel to avoid allocating lots of stacks for lots of tasks, and it makes it possible to reason more simply about static and other shared variables.
Therefore, all I/O operations in the Tock kernel are asynchronous and non-blocking. A method call starts an operation and returns immediately. When the operation completes, the struct implementing the operation calls a callback. Tock uses callbacks rather than closures because closures typically require dynamic memory allocation, which the kernel avoids and does not generally support.
This design does add complexity when writing drivers as a blocking API is generally simpler to use. However, this is a conscious choice to favor overall safety of the kernel (e.g. avoiding running out of memory or preventing other code from running on time) over functional correctness of individual drivers (because they might be more error-prone, not because they cannot be written correctly).
There are limited cases when the kernel can briefly block. For example, the SAM4L's GPIO controller can take up to 5 cycles to become ready between operations. Technically, a completely asynchronous driver would make this split-phase: the operation returns immediately, and issues a callback when it completes. However, because just setting up the callback will take more than 5 cycles, spinning for 5 cycles is not only simpler, it's also cheaper. The implementation therefore spins for a handful of cycles before returning, such that the operation is synchronous. These cases are rare, though: the operation has to be so fast that it's not worth allowing other code to run during the delay.
External Dependencies
Tock generally prohibits any external crates within the Tock kernel to avoid including external unsafe code. However, in certain situations Tock does allow external dependencies. This is decided on a case by case basis. For more details on this see External Dependencies.
Tock uses some external libraries by vendoring them within the libraries
folder. This puts the library's source in the same repository, while keeping the
library as a clearly separate crate. This adds a maintenance requirement and
complicates updates, so this is also used on a limited basis.
Using unsafe and Capabilities
Tock attempts to minimize the amount of unsafe code in the kernel. Of course, there are a number of operations that the kernel must do which fundamentally violate Rust's memory safety guarantees, and we try to compartmentalize these operations and explain how to use them in an ultimately safe manner.
For operations that violate Rust safety, Tock marks the functions, structs, and
traits as unsafe. This restricts the crates that can use these elements.
Generally, Tock tries to make it clear where an unsafe operation is occurring by
requiring the unsafe keyword be present. For example, with memory-mapped
input/output (MMIO) registers, casting an arbitrary pointer to a struct that
represents those registers violates memory safety unless the register map and
address are verified to be correct. To denote this, doing the cast is clearly
marked as unsafe. However, once the cast is complete, accessing those
registers no longer violates memory safety. Therefore, using the registers does
not require the unsafe keyword.
Not all potentially dangerous code violates Rust's safety model, however. For
example, stopping a process from running on the board does not violate
language-level safety, but is still a potentially problematic operation from a
security and system reliability standpoint, as not all kernel code should be
able halt arbitrary processes (in particular, untrusted capsules should not have
this access to this API). One way to restrict access to these types of functions
would be to re-use the unsafe mechanism, since cargo will emit a warning if
code that is prohibited from using unsafe attempts to invoke an unsafe
function. However, this muddles the use of unsafe, and makes it difficult to
understand if code potentially violates safety or is a restricted API.
Instead, Tock uses capabilities to restrict access to important APIs. As such, any public APIs inside the kernel that should be very restricted in what other code can use them should require a specific capability in their function signatures. This prevents code that has not explicitly been granted the capability from calling the protected API.
To promote the principle of least privilege, capabilities are relatively fine-grained and provide narrow access to specific APIs. This means that generally new APIs will require defining new capabilities.
Ease of Use and Understanding
Whenever possible, Tock's design optimizes to lower the barrier for new users or developers to understand and use Tock. Sometimes, this means intentionally making a design choice that prioritizes readability or clarity over performance.
As an example, Tock generally avoids using Rust's
features
and #[cfg()] attribute to enable conditional compilation. While using a set of
features can lead to optimizing exactly what code should be included when the
kernel is built, it also makes it very difficult for users unfamiliar with the
features to decide which features to enable and when. Likely, these users will
use the default configuration, reducing the benefit of having the features
available. Also, conditional compilation makes it very difficult to understand
exactly what version of the kernel is running on any particular board as the
features can substantially change what code is running. Finally, the non-default
options are unlikely to be tested as robustly as the default configuration,
leading to versions of the kernel which are no longer available.
Tock also tries to ensure Tock "just works" for users. This manifests by trying
to minimize the number of steps to get Tock running. The build system uses
make which is familiar to many developers, and just running make in a board
folder will compile the kernel. The most supported boards (Hail and imix) can
then be programmed by just running make install. Installing an app just
requires one more command: tockloader install blink. Tockloader will continue
to expand to support the ease-of-use with Tock. Now, "just works" is a design
goal that Tock is not completely meeting. But, future design decisions should
continue to encourage Tock to "just work".
Demonstrated Features
Tock discourages adding functionality to the kernel unless a clear use case has
been established. For example, adding a red-black tree implementation to
kernel/src/common might be useful in the future for some new Tock feature.
However, that would be unlikely to be merged without a use case inside of the
kernel that motivates needing a red-black tree. This general principle provides
a starting point for evaluating new features in pull requests.
Requiring a use case also makes the code more likely to be tested and used, as well as updated as other internal kernel APIs change.
Merge Aggressively, Archive Unabashedly
As an experimental embedded operating system with roots in academic research, Tock is likely to receive contributions of new, risky, experimental, or narrowly focused code that may or may not be useful for the long-term growth of Tock. Rather than use a "holding" or "contribution" repository for new, experimental code, Tock tries to merge new features into mainline Tock. This both eases the maintenance burden of the code (it doesn't have to be maintained out-of-tree) and makes the feature more visible.
However, not all features catch on, or are completed, or prove useful, and having the code in mainline Tock becomes an overall maintenance burden. In these cases, Tock will move the code to an archive repository.
Soundness and Unsafe Issues
An operating system necessarily must use unsafe code. This document explains the rationale behind some of the key mechanisms in Tock that do use unsafe code but should still preserve safety in the overall OS.
static_init!
The "type" of static_init! is basically:
#![allow(unused)] fn main() { T => (fn() -> T) -> &'static mut T }
Meaning that given a function that returns something of type T, static_init!
returns a mutable reference to T with static lifetime.
This is effectively meant to be equivalent to declaring a mutable static variable:
#![allow(unused)] fn main() { static mut MY_VAR: SomeT = SomeT::const_constructor(); }
Then creating a reference to it:
#![allow(unused)] fn main() { let my_ref: &'static mut = &mut MY_VAR; }
However, the rvalue in static declarations must be const (because Rust doesn't
have pre-initialization sections). So static_init! basically allows static
variables that have non-const initializers.
Note that in both of these cases, the caller must wrap the calls in unsafe
since references a mutable variable is unsafe (due to aliasing rules).
Use
static_init! is used in Tock to initialize capsules, which will eventually
reference each other. In all cases, these references are immutable. It is
important for these to be statically allocated for two reasons. First, it helps
surface memory pressure issues at link time (if they are allocated on the stack,
they won't trivially show up as out-of-memory link errors if the stack isn't
sized properly). Second, the lifetimes of mutually-dependent capsules needs to
be equal, and 'static is a convenient way of achieving this.
However, in a few cases, it is useful to start with a mutable reference in order
to enforce who can make certain calls. For example, setting up buffers in the
SPI driver is, for practical reasons, deferred until after construction but we
would like to enforce that it can only be called by the platform initialization
function (before the kernel loop starts). This is enforced because all
references after the platform is setup are immutable, and the config_buffers
method takes an &mut self (Note: it looks like this is not strictly
necessary, so maybe not a big deal if we can't do this).
Soundness
The thing that would make the use of static_init! unsafe is if it was used to
create aliases to mutable references. The fact that it returns an &'static mut
is a red flag, so it bears explanation why I think this is OK.
Just as with any &mut, as soon as it is reborrowed it can no longer be used.
What we do in Tock, specifically, is use it mutably in some cases immediately
after calling static_init!, then reborrow it immutably to pass into capsules.
If a particular capsule happened to accept a &mut, the compiler would try to
move the reference and it would either fail that call (if it's already
reborrowed immutably elsewhere) or disallow further reborrows. Note that this is
fine if it is indeed not used as a shared reference (although I don't think we
have examples of that use).
It is important, though, that the same code calling static_init! is not
executed twice. This creates two major issues. First, it could technically
result in multiple mutable references. Second, it would run the constructor
twice, which may create other soundness or functional issues with existing
references to the same memory. I believe this is not different that code that
takes a mutable reference to a static variable. To prohibit this, static_init!
internally uses an Option-like structure to mark when the static buffer has
been initialized, and causes a panic! if the same buffer is re-initialized
(i.e. the same static_init! was called twice). With this check, we can mark
static_init! as safe.
Alternatives
It seems technically possible to return an immutable static reference from
static_init! instead. It would require a bit of code changes, and wouldn't
allow us to restrict certain capsule methods to initialization, but may not be a
particularly big deal.
Also, something something static variables of type Option everywhere (ugh...
but maybe reasonable).
Capabilities: Restricting Access to Certain Functions and Operations
Certain operations and functions, particularly those in the kernel crate, are
not "unsafe" from a language perspective, but are unsafe from an isolation and
system operation perspective. For example, restarting a process, conceptually,
does not violate type or memory safety (even though the specific implementation
in Tock does), but it would violate overall system safety if any code in the
kernel could restart any arbitrary process. Therefore, Tock must be careful with
how it provides a function like restart_process(), and, in particular, must
not allow capsules, which are untrusted code that must be sandboxed by Rust, to
have access to the restart_process() function.
Luckily, Rust provides a primitive for doing this restriction: use of the
unsafe keyword. Any function marked as unsafe can only be called from a
different unsafe function or from an unsafe block. Therefore, by removing
the ability to define an unsafe block, using the #![forbid(unsafe_code)]
attribute in a crate, all modules in that crate cannot call any functions marked
with unsafe. In the case of Tock, the capsules crate is marked with this
attribute, and therefore all capsules cannot use unsafe functions. While this
approach is effective, it is very coarse-grained: it provides either access to
all unsafe functions or none. To provide more nuanced control, Tock includes a
mechanism called Capabilities.
Capabilities are essentially zero-memory objects that are required to call
certain functions. Abstractly, restricted functions, like restart_process(),
would require that the caller has a certain capability:
#![allow(unused)] fn main() { restart_process(process_id: usize, capability: ProcessRestartCapability) {} }
Any attempt to call that function without possessing that capability would
result in code that does not compile. To prevent unauthorized uses of
capabilities, capabilities can only be created by trusted code. In Tock, this is
implemented by defining capabilities as unsafe traits, which can only be
implemented for an object by code capable of calling unsafe. Therefore, code
in the untrusted capsules crate cannot generate a capability on its own, and
instead must be passed the capability by module in a different crate.
Capabilities can be defined for very broad purposes or very narrowly, and code can "request" multiple capabilities. Multiple capabilities in Tock can be passed by implementing multiple capability traits for a single object.
Capability Examples
-
One example of how capabilities are useful in Tock is with loading processes. Loading processes is left as a responsibility of the board, since a board may choose to handle its processes in a certain way, or not support userland processes at all. However, the kernel crate provides a helpful function called
load_processes()that provides the Tock standard method for finding and loading processes. This function is defined in the kernel crate so that all Tock boards can share it, which necessitates that the function be made public. This has the effect that all modules with access to the kernel crate can callload_processes(), even though calling it twice would lead to unwanted behavior. One approach is to mark the function asunsafe, so only trusted code can call it. This is effective, but not explicit, and conflates language-level safety with system operation-level safety. By instead requiring that the caller ofload_processes()has a certain capability, the expectations of the caller are more explicit, and the unsafe function does not have to be repurposed. -
A similar example is a function like
restart_all_processes()which causes all processes on the board to enter a fault state and restart from their original_startpoint with all grants removed. Again, this is a function that could violate the system-level goals, but could be very useful in certain situations or for debugging grant cleanup when apps fail. Unlikeload_processes(), however, it might make sense for a capsule to be able to callrestart_all_processes(), in response to a certain event or to act as a watchdog. In that case, restricting access by marking it asunsafewill not work: capsules cannot call unsafe code. By using capabilities, only a caller with the correct capability can callrestart_all_processes(), and individual boards can be very explicit about which capsules they grant which capabilities.
Lifetimes
Values in the Tock kernel can be allocated in three ways:
-
Static allocation. Statically allocated values are never deallocated. These values are represented as Rust "borrows" with a
'staticlifetime. -
Stack allocation. Stack allocated values have a lexically bound lifetime. That is, we know by looking at the source code when they will be deallocated. When you create a reference to such a value, the Rust type system ensures that reference is never used after the value is deallocated by assigning a "lifetime" to the reference.
-
Grant values. Values allocated from a process's grant region have a runtime-dependent lifetime. For example, when they are deallocated depends on whether the processes crashes. Since we can't represent runtime-dependent lifetimes in Rust's type-system, references to grant values in Tock are done through the
Granttype, which is owned by its referrer.
Next we'll discuss how Rust's notion of lifetimes maps to the lifetimes of values in Tock and how this affects the use of different types of values in the kernel.
Rust lifetimes
Each reference (called a borrow) in Rust has lifetime associated with its type that determines in what scope it is valid. The lifetime of a reference must be more constrained than the value it was borrowed from. The compiler, in turn, ensures that references cannot escape their valid scope.
As a result, data structures that store a reference must declare the minimal lifetime of that reference. For example:
#![allow(unused)] fn main() { struct Foo<'a> { bar: &'a Bar } }
defines a data structure Foo that contains a reference to another type, Bar.
The reference has a lifetime 'a, which is a type parameter of Foo. Note that
'a is an arbitrary choice of name for the lifetime, such as E in a generic
List<E>. It is also possible to use the explicit lifetime 'static rather
than a type parameter when the reference should always live forever, regardless
of how long the containing type (e.g. Foo) lives:
#![allow(unused)] fn main() { struct Foo { bar: &'static Bar } }
Buffer management
Buffers used in asynchronous hardware operations must be static. On the one hand, we need to guarantee (to the hardware) that the buffer will not be deallocated before the hardware relinquishes its pointer. On the other hand, the hardware has no way of telling us (i.e. the Rust compiler) that it will only access the buffer within a certain lexical bound (because we are using the hardware asynchronously). To resolve this, buffers passed to hardware should be allocated statically.
Circular dependencies
Tock uses circular dependencies to give capsules access to each other.
Specifically, two capsules that depend on each other will each have a field
containing a reference to the other. For example, a client of the timer Alarm
trait needs a reference to an instance of the timer in order to start/stop it,
while the instance of timer needs a reference to the client in order to
propagate events. This is handled by the set_client function, which allows the
platform definition to connect objects after creation.
#![allow(unused)] fn main() { impl Foo<'a> { fn set_client(&self, client: &'a Client) { self.client.set(client); } } }
Tock Threat Model
Overview
Tock provides hardware-based isolation between processes as well as language-based isolation between kernel capsules.
Tock supports a variety of hardware, including boards defined in the Tock repository and boards defined "out of tree" in a separate repository. Additionally, Tock's installation model may vary between different use cases even when those use cases are based on the same hardware. As a result of Tock's flexibility, the mechanisms it uses to provide isolation — and the strength of that isolation — vary from deployment to deployment.
This threat model describes the isolation provided by Tock as well as the trust model that Tock uses to implement that isolation. Users of Tock, which include board integrators and application developers, should use this threat model to understand what isolation Tock provides to them (and what isolation it may not provide). Tock developers should use this threat model as a guide for how to provide Tock's isolation guarantees.
Definitions
These definitions are shared between the documents in this directory.
A process is a runtime instantiation of an application binary. When an application binary "restarts", its process is terminated and a new process is started using the same binary. Note that the kernel is not considered a process, although it is a thread of execution.
Process data includes a process' binary in non-volatile storage, its memory footprint in RAM, and any data that conceptually belongs to the process that is held by the kernel or other processes. For example, if a process is reading from a UART then the data in the UART buffer is considered the process' data, even when it is stored in a location in RAM only readable by the kernel.
Kernel data includes the kernel's image in non-volatile storage as well as data in RAM that does not conceptually belong to processes. For example, the scheduler's data structures are kernel data.
Capsule data is data that is associated with a particular kernel capsule. This data can be either kernel data or process data, depending on its conceptual owner. For example, an ADC driver's configuration is kernel data, while samples an ADC driver takes on behalf of a process are process data.
Tock's users refers to entities that make use of Tock OS. In the context of threat modelling, this typically refers to board integrators (entities that combine Tock components into an OS to run on a specific piece of hardware) and application developers (who consume Tock's APIs and rely on the OS' guarantees).
Isolation Provided to Processes
Confidentiality: A process' data may not be accessed by other processes or by capsules, unless explicitly permitted by the process. Note that Tock does not generally provide defense against side channel attacks; see the Side Channel Defense heading below for more details. Additionally, Virtualization describes some limitations on isolation for shared resources.
Integrity: Process data may not be modified by other processes or by capsules, except when allowed by the process.
Availability: Processes may not deny service to each other at runtime. As an exception to this rule, some finite resources may be allocated on a first-come-first-served basis. This exception is described in detail in Virtualization.
Isolation Provided to Kernel Code
Confidentiality: Kernel data may not be accessed by processes, except where explicitly permitted by the owning component. Kernel data may not be accessed by capsules, except where explicitly permitted by the owning component. The limitations about side channel defense and Virtualization that apply to process data also apply to kernel data.
Integrity: Processes and capsules may not modify kernel data except through APIs intentionally exposed by the owning code.
Availability: Processes cannot starve the kernel of resources or otherwise perform denial-of-service attacks against the kernel. This does not extend to capsule code; capsule code may deny service to trusted kernel code. As described in Virtualization, kernel APIs should be designed to prevent starvation.
Isolation that Tock does NOT Provide
There are practical limits to the isolation that Tock can provide; this section describes some of those limits.
Side Channel Defense
In general, Tock's users should assume that Tock does NOT provide side channel mitigations except where Tock's documentation indicates side channel mitigations exist.
Tock's answer to "should code X mitigate side channel Y" is generally "no". Many side channels that Tock can mitigate in theory are too expensive for Tock to mitigate in practice. As a result, Tock does not mitigate side channels by default. However, specific Tock components may provide and document their own side channel mitigation. For instance, Tock may provide a cryptography API that implements constant-time operations, and may document the side channel defense in the cryptography API's documentation.
In deciding whether to mitigate a side channel, Tock developers should consider both the cost of mitigating the side channel as well as the value provided by mitigating that side channel. For example:
-
Tock does not hide a process' CPU usage from other processes. Hiding CPU utilization generally requires making significant performance tradeoffs, and CPU utilization is not a particularly sensitive signal.
-
Although Tock protects a process' data from unauthorized access, Tock does not hide the size of a process' data regions. Without virtual memory hardware, it is very difficult to hide a process' size, and that size is not particularly sensitive.
-
It is often practical to build constant-time cryptographic API implementations, and protecting the secrecy of plaintext is valuable. As such, it may make sense for a Tock board to expose a cryptographic API with some side channel defenses.
Guaranteed Launching of Binaries
Tock does not guarantee that binaries it finds are launched as processes. For example, if there is not enough RAM available to launch every binary then the kernel will skip some binaries.
This parallels the "first-come, first-served" resource reservation process described in Virtualization.
Components Trusted to Provide Isolation
The Tock kernel depends on several components (including hardware and software) in order to implement the above isolation guarantees. Some of these components, such as the application loader, may vary depending on Tock's use case. The following documents describe the trust model that exists between the Tock kernel and its security-relevant dependencies:
-
Capsule Isolation describes the coding practices used to isolate capsules from the remainder of the kernel.
-
Application Loader describes the trust placed in the application deployment mechanism.
-
TBF Headers describes the trust model associated with the Tock Binary Format headers.
-
Code Review describes code review practices used to ensure the trustworthiness of Tock's codebase.
What is an "Application"?
Formally, a Tock application is the set of all processes that have a particular application ID (as detailed in the AppID TRD).
Every process has an application ID (which may be global or locally unique), so every process is part of an application.
Application IDs are generally used as a way to grant access to something. For example, a process that wants to send a message to another process will generally do so by sending the message to that process' application ID. Doing so grants that application access to the message. The IPC system is responsible for identifying which process has that application ID (if any) and giving the message to that process.
In the context of storage, it often makes sense for a process to share data with its own application ID. That allows future processes belonging to the same application (e.g. after a system reboot) to access that data.
Capsule Isolation
Isolation Mechanism
Capsules are limited to what they can access within Rust's type system without
using unsafe. That isolation is implemented by banning unsafe from use in
capsule code and by banning the use of unaudited libraries (except those that
ship with Rust's toolchain) in kernel code. This isolation is vulnerable to code
that exploits compiler bugs or bugs in unsafe code in toolchain libraries.
When a board integrator chooses to use a capsule, they are responsible for
auditing the code of the capsule to confirm the policies are followed and to
detect potentially malicious behavior. The use of Rust's type system as a
security isolation mechanism relies in part on Rust's resistance to underhanded
programming techniques (stealthy obfuscation), and is a weaker form of isolation
than the hardware-backed isolation used to isolate the kernel (and other
processes) from processes.
Capsules are scheduled cooperatively with the rest of the kernel, and as such they can deny service to the rest of the system.
Impact on Kernel API Design
Kernel APIs should be designed to limit the data that capsules have access to. Trusted kernel code should use capabilities as necessary in its API to limit the access that capsule code has. For example, an API that allows its clients to access data that is not owned by either the API or caller should require a "trusted" capability.
Virtualization
Tock components that share resources between multiple clients (which may be kernel components, processes, or a mix of both) are responsible for providing confidentiality and availability guarantees to those clients.
Data Sharing (Confidentiality)
In general, kernel components with multiple clients should not share data between their clients. Furthermore, data from a client should not end up in a capsule the client is unaware of.
When a capsule with multiple clients is given a buffer by one of those clients, it must do one of the following:
-
Avoid sharing the buffer with any other kernel code. Return the buffer to the same client.
-
Only share the buffer downwards, to lower-level components. For example, a capsule providing virtualized access to a piece of hardware may pass the buffer to the driver for that hardware.
-
Wipe the buffer before sharing it with another client.
Kernel components with multiple clients that retrieve data on behalf of those clients must implement isolation commensurate with their functionality. When possible, components reading from shared buses should mux data transferred over those buses. For example:
-
A UDP API can provide a mechanism for clients (processes and/or capsules) to gain exclusive access to a port. The UDP API should then prevent clients from reading messages sent to other clients or impersonating other clients.
-
A UART API with multiple clients should implement a protocol that allows the UART API to determine which client a received packet belongs to and route it accordingly (in other words, it should implement some form of muxing).
-
Analog-to-Digital Converter (ADC) hardware does not have a concept of which process "owns" data, nor is there a way to implement such a concept. As such, an ADC API that allows clients to take samples upon request does not need to take separate samples for different clients. An ADC API that receives simultaneous requests to sample the same source may take a single reading and distribute it to multiple clients.
Fairness (Availability)
Tock components do not need to guarantee fairness between clients. For example, a UART virtualization layer may allow capsules/processes using large buffers to see higher throughputs than capsules/processes using small buffers. However, components should prevent starvation when the semantics of the operation allow it. For the UART example, this means using round-robin scheduling rather than preferring lower-numbered clients.
When it is not possible to prevent starvation — such as shared resources that may be locked for indefinite amounts of time — then components have two options:
-
Allow resource reservations on a first-come, first-served basis. This is essentially equivalent to allowing clients to take out unreturnable locks on the resources.
-
Restrict access to the API using a kernel capability (only possible for internal kernel APIs).
An example of an API that would allow first-come-first-served reservations is crypto hardware with a finite number of non-sharable registers. In this case, different processes can use different registers, but if the registers are overcommitted then later/slower processes will be unable to reserve resources.
An example of an API that would be protected via a kernel capability is indefinite continuous ADC sampling that blocks other ADC requests. In this case, first-come-first-served reservations do not make sense because only one client can be supported anyway.
Application Loader
What is an Application Loader?
The term "application loader" refers to the mechanism used to add Tock applications to a Tock system. It can take several forms; here are a few examples:
-
Tockloader is an application loader that runs on a host system. It uses various host-to-board interfaces (e.g. JTAG, UART bootloader, etc) to manipulate application binaries on the Tock system's nonvolatile storage.
-
Some build systems combine the kernel and apps at build time into a single, monolithic image. This monolithic image is then deployed using a programming tool.
-
A kernel-assisted installer may be a Tock capsule that receives application binaries over USB and writes them into flash.
Why Must We Trust It?
The application loader has the ability to read and modify application binaries. As a result, the application loader must be trusted to provide confidentiality and sometimes integrity guarantees to applications. For example, the application loader must not modify or exfiltrate applications other than the application(s) it was asked to operate on.
Tock kernels that require all application binaries to be signed do not need to trust the application loader for application integrity, as that is done by validating the signature instead. Tock kernels that do not require signed application binaries must trust the application loader to not maliciously modify applications.
To protect the kernel's confidentiality, integrity, and availability the application loader must not modify, erase, or exfiltrate kernel data. On most boards, the application loader must be trusted to not modify, erase, or exfiltrate kernel data. However, Tock boards may use other mechanisms to protect the kernel without trusting the application loader. For example, a board with access-control hardware between its flash storage and the application loader may use that hardware to protect the kernel's data without trusting the application loader.
Tock Binary Format (TBF) Total Size Verification Requirement
The application loader is required to confirm that the TBF header's total_size
field is correct for the specified format version (as specified in the
Tock Binary Format) before deploying
an application binary. This is to prevent the newly-deployed application from
executing the following attacks:
-
Specifying a too-large
total_sizethat includes the subsequent application(s) binary, allowing the malicious application to read the binary (impacting confidentiality). -
Specifying a too-small
total_sizeand making the kernel parse the end of its image as the subsequent application binary's TBF headers (impacting integrity).
Trusted Compute Base in the Application Loader
The application loader may be broken into multiple pieces, only some of which need to be trusted. The resulting threat model depends on the form the application loader takes. For example:
-
Tockloader has the access it needs to directly delete, corrupt, and exfiltrate the kernel. As a result, Tockloader must be trusted for Tock's confidentiality, integrity, and availability guarantees.
-
A build system that combines apps into a single image must be trusted to correctly compile and merge the apps and kernel. The build system must be trusted to provide confidentiality, integrity, and availability guarantees. The firmware deployment mechanism must be trusted for confidentiality and availability guarantees. If the resulting image is signed (and the signature verified by a bootloader), then the firmware deployment mechanism need not be trusted for integrity. If there is no signature verification in the bootloader then the firmware deployment mechanism must be trusted for integrity as well.
-
An application loader that performs the nonvolatile storage write from within Tock's kernel may make its confidentiality, integrity, and availability guarantees in the Tock kernel. Such a loader would need to perform the
total_sizefield verification within the kernel. In that case, the kernel code is the only code that needs to be trusted, even if there are other components to the application loader (such as a host binary that transmits the application over USB).
TBF Headers
TBF is the Tock Binary Format. It is the format of application binaries in a Tock system's flash storage.
TBF headers are considered part of an application, and are mostly untrusted. As such, TBF header parsing must be robust against malicious inputs (e.g. pointers must be checked to confirm they are in-bounds for the binary).
However, because the kernel relies on the TBF's total_size field to load the
binaries, the application loader is responsible for verifying the total_size
field at install time. The kernel trusts the total_size field for
confidentiality and integrity.
When possible, TLV types should be designed so that the kernel does not need to trust their correctness. When a TLV type is defined that the kernel must trust, then the threat model must be updated to indicate that application loaders are responsible for verifying the value of that TLV type.
Code Review
Kernel Code Review
Changes to the Tock OS kernel (in the kernel/ directory of the repository) are reviewed by the Tock core working group. However, not all ports of Tock (which include chip crates, board crates, and hardware-specific capsules) are maintained by the Tock core working group.
The Tock repository must document which working group (if any) is responsible for each hardware-specific crate or capsule.
Third-Party Dependencies
Tock OS repositories permit third party dependencies for critical components that are impractical to author directly. Each repository containing embedded code (including tock, libtock-c, and libtock-rs) must have a written policy documenting:
-
All unaudited required dependencies. For example, Tock depends on Rust's libcore, and does not audit
libcore's source. -
How to avoid pulling in unaudited optional dependencies.
A dependency may be audited by vendoring it into the repository and putting it through code review. This policy does not currently apply to host-side tools, such as elf2tab and tockloader, but may be extended in the future.
Implementation
Documentation related to the implementation of Tock.
How does Tock compile?
There are two types of compilation artifacts in Tock: the kernel and user-level processes (i.e. apps). Each type compiles differently. In addition, each platform has a different way of programming the kernel and processes. Below is an explanation of both kernel and process compilation as well as some examples of how platforms program each onto an actual board.
Compiling the kernel
The kernel is divided into five Rust crates (i.e. packages):
-
A core kernel crate containing key kernel operations such as handling interrupts and scheduling processes, shared kernel libraries such as
SubSlice, and the Hardware Interface Layer (HIL) definitions. This is located in thekernel/folder. -
An architecture (e.g. ARM Cortex M4) crate that implements context switching, and provides memory protection and systick drivers. This is located in the
arch/folder. -
A chip-specific (e.g. Atmel SAM4L) crate which handles interrupts and implements the hardware abstraction layer for a chip's peripherals. This is located in the
chips/folder. -
One (or more) crates for hardware independent drivers and virtualization layers. This is the
capsules/folder in Tock. External projects using Tock may create additional crates for their own drivers. -
A platform-specific (e.g. Imix) crate that configures the chip and its peripherals, assigns peripherals to drivers, sets up virtualization layers, and defines a system call interface. This is located in
boards/.
These crates are compiled using Cargo, Rust's package
manager, with the platform crate as the base of the dependency graph. In
practice, the use of Cargo is masked by the Makefile system in Tock. Users can
simply type make from the proper directory in boards/ to build the kernel
for that platform.
Internally, the Makefile is simply invoking Cargo to handle the build. For
example, make on the imix platform roughly translates to:
$ cargo build --release --target=thumbv7em-none-eabi
The --release argument tells Cargo to invoke the Rust compiler with
optimizations turned on. --target points Cargo to the target specification
which includes the LLVM data-layout definition and architecture definitions for
the compiler. Note, Tock uses additional compiler and linker flags to generate
correct and optimized kernel binaries for our supported embedded targets.
Life of a Tock compilation
When Cargo begins compiling the platform crate, it first resolves all
dependencies recursively. It chooses package versions that satisfy the
requirements across the dependency graph. Dependencies are defined in each
crate's Cargo.toml file and refer to paths in the local file-system, a remote
git repository, or a package published on crates.io.
Second, Cargo compiles each crate in turn as dependencies are satisfied. Each
crate is compiled as an rlib (an ar archive containing object files) and
combined into an executable ELF file by the compilation of the platform crate.
You can see each command executed by cargo by passing it the --verbose
argument. In our build system, you can run make V=1 to see the verbose
commands.
Platform Build Scripts
Cargo supports
build scripts
when compiling crates, and Tock provides the boards/build.rs build script. In
Tock, these build scripts are primarily used to instruct cargo to rebuild the
kernel if a linker script changes.
Cargo's build.rs scripts are small Rust programs that must be compiled as part
of the kernel build process. Since these scripts execute on the host machine,
this means building Tock requires a Rust toolchain valid for the host machine
and its architecture. Cargo runs the compiled build script when compiling the
platform crate.
LLVM Binutils
Tock uses the lld, objcopy, and size tools included with the Rust
toolchain to produce kernel binaries that are executed on microcontrollers. This
has two main ramifications:
- The tools are not entirely feature-compatible with the GNU versions. While they are very similar, there are edge cases where they do not behave exactly the same. This will likely improve with time, but it is worth noting in case unexpected issues arise.
- The tools will automatically update with Rust versions. The tools are
provided in the
llvm-toolsrustup component that is compiled for and ships with every version of the Rust toolchain. Therefore, if Rust updates the version they use in the Rust repository, Tock will also see those updates.
Special .apps section
Tock kernels include a .apps section in the kernel .elf file that is at the
same physical address where applications will be loaded. When compiling the
kernel, this is just a placeholder and is not populated with any meaningful
data. It exists to make it easy to update the kernel .elf file with an
application binary to make a monolithic .elf file so that the kernel and apps
can be flashed together.
When the Tock build system creates the kernel binary, it explicitly removes this section so that the placeholder is not included in the kernel binary.
To use the special .apps section, objcopy can replace the placeholder with
an actual app binary. The general command looks like:
$ arm-none-eabi-objcopy --update-section .apps=libtock-c/examples/c_hello/build/cortex-m4/cortex-m4.tbf target/thumbv7em-none-eabi/release/stm32f412gdiscovery.elf target/thumbv7em-none-eabi/release/stm32f4discovery-app.elf
This replaces the placeholder section .apps with the "c_hello" application TBF
in the stm32f412gdiscovery.elf kernel ELF, and creates a new .elf called
stm32f4discovery-app.elf.
Compiling a process
Unlike many other embedded systems, compilation of application code is entirely
separated from the kernel in Tock. An application uses a libtock library and
is built into a free-standing binary. The binary can then be uploaded onto a
Tock platform with an already existing kernel to be loaded and run.
Tock can support applications using any programming language and compiler provided the applications can run with only access to fixed regions in flash and RAM and without virtual memory.
Each Tock process requires a header that informs the kernel of the size of the application's binary and where the location of the entry point is within the compiled binary.
Executing without Virtual Memory
Tock supports resource constrained microcontrollers which do not support virtual memory. This means Tock process cannot assume a known address space. Tock supports two methods for enabling processes despite the lack of virtual memory: embedded PIC (FDPIC) and fixed address loading.
Position Independent Code
Since Tock loads applications separately from the kernel and is capable of running multiple applications concurrently, applications cannot know in advance at which address they will be loaded. This problem is common to many computer systems and is typically addressed by dynamically linking and loading code at runtime.
Tock, however, makes a different choice and requires applications to be compiled
as position independent code. Compiling with FDPIC makes all control flow
relative to the current PC, rather than using jumps to specified absolute
addresses. All data accesses are relative to the start of the data segment for
that app, and the address of the data segment is stored in a register referred
to as the base register. This allows the segments in Flash and RAM to be
placed anywhere, and the OS only has to correctly initialize the base register.
FDPIC code can be inefficient on some architectures such as x86, but the ARM instruction set is optimized for FDPIC operation and allows most code to execute with little to no overhead. Using FDPIC still requires some fixup at runtime, but the relocations are simple and cause only a one-time cost when an application is loaded. A more in-depth discussion of dynamically loading applications can be found on the Tock website: Dynamic Code Loading on a MCU.
For applications compiled with arm-none-eabi-gcc, building FDPIC code for Tock
requires four flags:
-fPIC: only emit code that uses relative addresses.-msingle-pic-base: force the use of a consistent base register for the data sections.-mpic-register=r9: use register r9 as the base register.-mno-pic-data-is-text-relative: do not assume that the data segment is placed at a constant offset from the text segment.
Each Tock application uses a linker script that places Flash at address
0x80000000 and SRAM at address 0x00000000. This allows relocations pointing
at Flash to be easily differentiated from relocations pointing at RAM.
Fixed Address Loading
Unfortunately, not all compilers support FDPIC. As of August 2023, LLVM and riscv-gcc both do not support FDPIC. This complicates running Tock processes, but Tock supports an alternative method using fixed addresses. This method works by compiling Tock processes for fixed addresses in both flash and RAM (as typical embedded compilation would do) and then processes are placed in flash so that they match their fixed flash address and the kernel sets their RAM region so their RAM addresses match. While this simplifies compilation, ensuring that those addresses are properly met involves several components.
Fixed Address TBF Header
The first step is the linker must communicate which addresses it expects the
process to be placed at in both flash and RAM at execution time. It does this
with two symbols in the .elf file:
_flash_origin: The address in flash the app was compiled for._sram_origin: The address in ram the app was compiled for.
These symbols are then parsed by elf2tab. elf2tab uses _flash_origin to
ensure the .tbf file is properly created so that the compiled binary will end
up at the correct address. Both _flash_origin and _sram_origin are used to
create a FixedAddresses TBF TLV that is included in the TBF header. An example
of the Fixed Addresses TLV:
TLV: Fixed Addresses (5) [0x40 ]
fixed_address_ram : 536920064 0x2000c000
fixed_address_flash : 268599424 0x10028080
With the Fixed Addresses TLV included in the TBF header, the kernel and other tools now understand that for this process its address requirements must be met.
By convention, userspace apps compiled for fixed flash and RAM addresses include
the addresses in the .tbf filenames. For example, the leds example compiled as
a libtock-rs app might have a TAB that looks like:
[STATUS ] Inspecting TABs...
TAB: leds
build-date: 2023-08-08 22:24:07+00:00
minimum-tock-kernel-version: 2.1
tab-version: 1
included architectures: cortex-m0, cortex-m4, riscv32imc
tbfs:
cortex-m0.0x10020000.0x20004000
cortex-m0.0x10028000.0x2000c000
cortex-m4.0x00030000.0x20008000
cortex-m4.0x00038000.0x20010000
cortex-m4.0x00040000.0x10002000
cortex-m4.0x00040000.0x20008000
cortex-m4.0x00042000.0x2000a000
cortex-m4.0x00048000.0x1000a000
cortex-m4.0x00048000.0x20010000
cortex-m4.0x00080000.0x20006000
cortex-m4.0x00088000.0x2000e000
riscv32imc.0x403b0000.0x3fca2000
riscv32imc.0x40440000.0x3fcaa000
Loading Fixed Address Processes into Flash
When installing fixed address processes on a board the loading tool must ensure that it places the TBF at the correct address in flash so that the process binary executes at the address the linker intended. Tockloader supports installing apps on boards and placing them at their fixed address location. Tockloader will try to find a sort order based on available TBFs to install all of the requested apps at valid fixed addresses.
With the process loaded at its fixed flash address, its essential that the RAM address the process is expecting can also be met. However, the valid RAM addresses for process is determined by the memory the kernel has reserved for processes. Typically, this memory region is dynamic based on memory the kernel is not using. The loader tool needs to know what memory is available for processes so it can choose the compiled TBF that expects a RAM address the kernel will actually be able to satisfy.
For the loader tool to learn what RAM addresses are available for processes the kernel includes a TLV kernel attributes structure in flash immediately before the start of apps. Tockloader can read these attributes to determine the valid RAM range for processes so it can choose suitable TBFs when installing apps.
Booting Fixed Address Processes
The final step is for the kernel to initialize and execute processes. The processes are already stored in flash, but the kernel must allocate a RAM region that meets the process's fixed RAM requirements. The kernel will leave gaps in RAM between processes to ensure processes have the RAM addresses they expected during compilation.
Tock Binary Format
In order to be loaded correctly, applications must follow the Tock Binary Format. This means the initial bytes of a Tock app must follow this format so that Tock can load the application correctly.
In practice, this is automatically handled for applications. As part of the compilation process, a tool called Elf to TAB does the conversion from ELF to Tock's expected binary format, ensuring that sections are placed in the expected order, adding a section that lists necessary load-time relocations, and creating the TBF header.
Tock Application Bundle
To support ease-of-use and distributable applications, Tock applications are
compiled for multiple architectures and bundled together into a "Tock
Application Bundle" or .tab file. This creates a standalone file for an
application that can be flashed onto any board that supports Tock, and removes
the need for the board to be specified when the application is compiled. The TAB
has enough information to be flashed on many or all Tock compatible boards, and
the correct binary is chosen when the application is flashed and not when it is
compiled.
TAB Format
.tab files are tared archives of TBF compatible binaries along with a
metadata.toml file that includes some extra information about the application.
A simplified example command that creates a .tab file is:
tar cf app.tab cortex-m0.bin cortex-m4.bin metadata.toml
Metadata
The metadata.toml file in the .tab file is a TOML file that contains a
series of key-value pairs, one per line, that provides more detailed information
and can help when flashing the application. Existing fields:
tab-version = 1 // TAB file format version
name = "<package name>" // Package name of the application
only-for-boards = <list of boards> // Optional list of board kernels that this application supports
build-date = 2017-03-20T19:37:11Z // When the application was compiled
Loading the kernel and processes onto a board
There is no particular limitation on how code can be loaded onto a board. JTAG
and various bootloaders are all equally possible. For example, the hail and
imix platforms primarily use the serial "tock-bootloader", and the other
platforms use jlink or openocd to flash code over a JTAG connection. In general,
these methods are subject to change based on whatever is easiest for users of
the platform.
In order to support multiple concurrent applications, the easiest option is to
use tockloader (git repo) to manage
multiple applications on a platform. Importantly, while applications currently
share the same upload process as the kernel, they are planned to support
additional methods in the future. Application loading through wireless methods
especially is targeted for future editions of Tock.
Kernel Configuration
Because Tock is meant to run on various platforms (spanning multiple architectures and various available peripherals), and with multiple use cases in mind (for example, "production" vs. debug build with various levels of debugging detail), Tock provides various configuration options so that each build can be adapted to each use case. In general, there are three variants of kernel configuration that Tock supports:
- Per-board customization of kernel components. For example, choosing the scheduling algorithm the kernel uses. The policies guide goes into more depth on this configuration variant.
- Crate-level composition of kernel code. Building a functional kernel consists of using several crates, and choosing specific crates can configure the kernel for a specific board or use case.
- Compile-time configuration to conditionally compile certain kernel features.
Tock attempts to support these configuration variants while avoiding undue confusion as to what exact code is being included in any particular kernel compilation. Specifically, Tock tries to avoid pitfalls of "ifdef" conditional code (which can be tricky to reason about which code is being include and to suitable test).
Crate-Level Configuration
Each level of abstraction (e.g. core kernel, CPU architecture, chip, board) has its own crate. Configuring a board is then done by including the relevant crates for the particular chip.
For example, many microcontrollers have a family of related chips. Depending on which specific version of a MCU a board uses often makes subtle adjustments to which peripherals are available. A board makes these configurations by careful choosing which crates to include as dependencies. Consider a board which uses the nRF52840 MCU, a version in the nRF52 family. It's board-level dependency tree might look like:
┌────────────────┐
│ │
│ Board Crate │
│ │
└─────┬─────────┬┘
│ └───────┬───────────────┐
┌──► ┌─────┴────────┐ ┌──┴───────┐ ┌─────┴────┐
│ │ nRF52840 │ │ Capsules │ │ Kernel │
│ └─────┬────────┘ └──────────┘ └──────────┘
│ ┌───┴──────┐
│ │ nRF52 │
Chips │ └───┬──────┘
│ ┌───┴──────┐
│ │ nRF5 │
└──► └──────────┘
where choosing the specific chip-variant as a dependency configures the code included in the kernel. These dependencies are expressed via normal Cargo crate dependencies.
Compile-Time Configuration Options
To facilitate fine-grained configuration of the kernel (for example to enable
syscall tracing), a Config struct is defined in kernel/src/config.rs. The
Config struct defines a collection of boolean values which can be imported
throughout the kernel crate to configure the behavior of the kernel. As these
values are const booleans, the compiler can statically optimize away any code
that is not used based on the settings in Config, while still checking syntax
and types.
To make it easier to configure the values in Config, the values of these
booleans are determined by cargo features. Individual boards can determine which
features of the kernel crate are included without users having to manually
modify the code in the kernel crate. Because of how feature unification works,
all features are off-by-default, so if the Tock kernel wants a default value for
a config option to be turning something on, the feature should be named
appropriately (e.g. the no_debug_panics feature is enabled to set the
debug_panics config option to false).
To enable any feature, modify the Cargo.toml in your board crate as follows:
[dependencies]
# Turn off debug_panics, turn on trace_syscalls
kernel = { path = "../../kernel", features = ["no_debug_panics", "trace_syscalls"]}
These features should not be set from any crate other than the top-level board crate. If you prefer not to rely on the features, you can still directly modify the boolean config value in kernel/src/config.rs if you prefer---this can be easier when rapidly debugging on an upstream board, for example.
To use the configuration within the kernel crate, simply read the values. For
example, to use a boolean configuration, just use an if statement.
Kernel Attributes
Kernel attributes are stored in a data structure at the end of the kernel's allocated flash region. These attributes describe properties of the flashed kernel on a particular hardware board. External tools can read these attributes to learn about the kernel installed on the board.
The attributes are stored at the end of the kernel's allocated flash region to help with discoverability. Tock tools generally assume that 1) userspace applications are installed immediately after the end of the kernel region in flash, and 2) that the address for the start of userspace applications is known. By placing the kernel attributes at the end of the kernel flash region, Tock tools can find the attributes by starting at the start of userspace applications in flash and working backwards.
Format
Kernel attributes are stored in a descending TLV (type-length-value) structure. That means they start at the highest address in flash, and are appended in descending flash addresses.
The first four bytes are a sentinel that spells "TOCK" (in ASCII). This sentinel allows external tools to check if kernel attributes are present. Note, "first" in this context means the four bytes with the largest address since this structure is stored at the end of flash.
The next byte is a version byte. This allows for future changes to the structure.
The next three bytes are reserved.
After the header are zero or more TLV structures that hold the kernel attributes.
Header Format
0 1 2 3 4 (bytes)
+----------+----------+----------+----------+
| TLVs... |
+----------+----------+----------+----------+
| Reserved | Reserved | Reserved | Version |
+----------+----------+----------+----------+
| T (0x54) | O (0x4F) | C (0x43) | K (0x4B) |
+----------+----------+----------+----------+
^
end of flash region─┘
TLV Format
0 1 2 3 4 (bytes)
+----------+----------+----------+----------+
| Value... |
+----------+----------+----------+----------+
| Type | Length |
+----------+----------+----------+----------+
- Type: Indicates which TLV this is. Little endian.
- Length: The length of the value. Little endian.
- Value: Length bytes corresponding to the TLV.
TLVs
The TLV types used for kernel attributes are unrelated to the TLV types used for the Tock Binary Format. However, to minimize possible confusion, type values for each should not use the same numbers.
App Memory (0x0101)
Specifies the region of memory the kernel will use for applications.
0 1 2 3 4 (bytes)
+----------+----------+----------+----------+
| Start Address |
+----------+----------+----------+----------+
| App Memory Length |
+----------+----------+----------+----------+
| Type = 0x0101 | Length = 8 |
+----------+----------+----------+----------+
- Start Address: The address in RAM the kernel will use to start allocation memory for apps. Little endian.
- App Memory Length: The number of bytes in the region of memory for apps. Little endian.
Kernel Binary (0x0102)
Specifies where the kernel binary is and its size.
0 1 2 3 4 (bytes)
+----------+----------+----------+----------+
| Start Address |
+----------+----------+----------+----------+
| Binary Length |
+----------+----------+----------+----------+
| Type = 0x0102 | Length = 8 |
+----------+----------+----------+----------+
- Start Address: The address in flash the kernel binary starts at. Little endian.
- Binary Length: The number of bytes in the kernel binary. Little endian.
Kernel Attributes Location
Kernel attributes are stored at the end of the kernel's flash region and immediately before the start of flash for TBFs.
Memory Layout
This document describes how the memory in Tock is structured and used for the kernel, applications, and supporting state.
Note: This is a general guide describing the canonical memory layout for Tock. In practice, embedded hardware is fairly varied and individual chips may deviate from this either subtly or substantially.
Tock is intended to run on microcontrollers like the Cortex-M, which have
non-volatile flash memory (for code) and RAM (for stack and data) in a single
address space. While the Cortex-M architecture specifies a high-level layout of
the address space, the exact layout of Tock can differ from board to board. Most
boards simply define the beginning and end of flash and SRAM in their
layout.ld file and then include the
generic Tock memory map.
Flash
The nonvolatile flash memory holds the kernel code and a linked-list of sorts of process code.
Kernel code
The kernel code is split into two major regions. The first is .text, which
holds the vector table, program code, initialization routines, and other
read-only data. This section is written to the beginning of flash.
The second major region following up the .text region is the .relocate
region. It holds values that need to exist in SRAM, but have non-zero initial
values that Tock copies from flash to SRAM as part of its initialization (see
Startup docs).
Process code
Processes are placed in flash starting at a known address which can be retrieved
in the kernel using the symbol _sapps. Each process starts with a Tock Binary
Format (TBF) header and then the actual application binary. Processes are placed
continuously in flash, and each process's TBF header includes the entire size of
the process in flash. This creates a linked-list structure that the kernel uses
to traverse apps. The end of the valid processes are denoted by an invalid TBF
header. Typically the flash page after the last valid process is set to all 0x00
or 0xFF.
RAM
The RAM holds the data currently being used by both the kernel and processes.
Kernel RAM
The kernel RAM contains three major regions:
- Kernel stack.
- Kernel data: initialized memory, copied from flash at boot.
- Kernel BSS: uninitialized memory, zeroed at boot.
Process RAM
The process RAM is memory space divided between all running apps.
A process's RAM contains four major regions:
- Process stack
- Process data
- Process heap
- Grant
The figure below shows the memory space of one process.
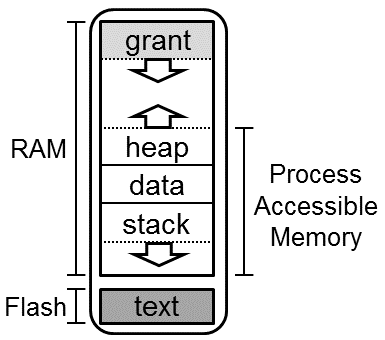
Hardware Implementations
SAM4L
The SAM4L is a microcontroller used on the Hail and Imix platforms, among others. The structure of its flash and RAM is as follows.
Flash
| Address Range | Length (bytes) | Content | Description |
|---|---|---|---|
| 0x0-3FF | 1024 | Bootloader | Reserved flash for the bootloader. Likely the vector table. |
| 0x400-0x5FF | 512 | Flags | Reserved space for flags. If the bootloader is present, the first 14 bytes are "TOCKBOOTLOADER". |
| 0x600-0x9FF | 1024 | Attributes | Up to 16 key-value pairs of attributes that describe the board and the software running on it. |
| 0xA00-0xFFFF | 61.5k | Bootloader | The software bootloader provides non-JTAG methods of programming the kernel and applications. |
| 0x10000-0x3FFFF | 128k | Kernel | Flash space for the kernel. |
| 0x3FFxx-0x3FFFF | variable | Attributes | Kernel attributes that describe various properties of the kernel. |
| 0x40000-0x7FFFF | 320k | Apps | Flash space for applications. |
RAM
| Address Range | Length (bytes) | Content | Description |
|---|---|---|---|
| 0x20000000-0x2000FFFF | 64k | Kernel and app RAM | The kernel links with all of the RAM, and then allocates a buffer internally for application use. |
Overview
The following image gives an example of how things are currently laid out in practice. It shows the address space of both flash and RAM with three running applications: crc, ip_sense, and analog_comparator.
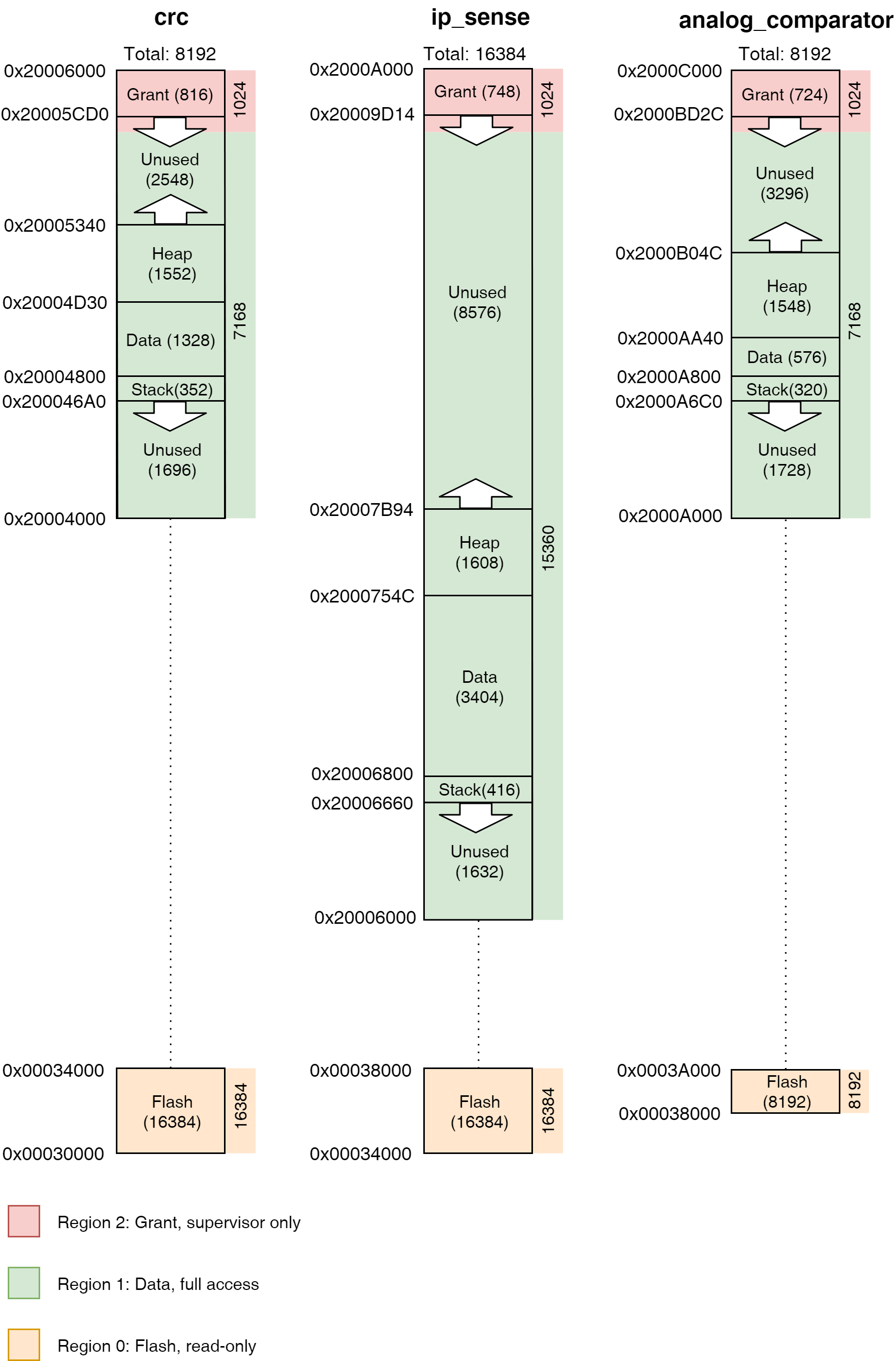
Mutable References, Memory Containers, and Cells
Borrows are a critical part of the Rust language that help provide its safety guarantees. However, when there is no dynamic memory allocation (no heap), as with Tock, event-driven code runs into challenges with Rust's borrow semantics. Often multiple structs need to be able to call (share) a struct based on what events occur. For example, a struct representing a radio interface needs to handle callbacks both from the bus it uses as well as handle calls from higher layers of a networking stack. Both of these callers need to be able to change the state of the radio struct, but Rust's borrow checker does not allow them to both have mutable references to the struct.
To solve this problem, Tock builds on the observation that having two references
to a struct that can modify it is safe, as long as no references to memory
inside the struct are leaked (there is no interior mutability). Tock uses
memory containers, a set of types that allow mutability but not interior
mutability, to achieve this goal. The Rust standard library has two memory
container types, Cell and RefCell. Tock uses Cell extensively, but also
adds five new memory container types, each of which is tailored to a specific
use common in kernel code.
Brief Overview of Borrowing in Rust
Ownership and Borrowing are two design features in Rust which prevent race conditions and make it impossible to write code that produces dangling pointers.
Borrowing is the Rust mechanism to allow references to memory. Similar to references in C++ and other languages, borrows make it possible to efficiently pass large structures by passing pointers rather than copying the entire structure. The Rust compiler, however, limits borrows so that they cannot create race conditions, which are caused by concurrent writes or concurrent reads and writes to memory. Rust limits code to either a single mutable (writeable) reference or any number of read-only references.
If a piece of code has a mutable reference to a piece of memory, it's also
important that other code does not have any references within that memory.
Otherwise, the language is not safe. For example, consider this case of an
enum which can be either a pointer or a value:
#![allow(unused)] fn main() { enum NumOrPointer { Num(u32), Pointer(&'static mut u32) } }
A Rust enum is like a type-safe C union. Suppose that code has both a mutable
reference to a NumOrPointer and a read-only reference to the encapsulated
Pointer. If the code with the NumOrPointer reference changes it to be a
Num, it can then set the Num to be any value. However, the reference to
Pointer can still access the memory as a pointer. As these two representations
use the same memory, this means that the reference to Num can create any
pointer it wants, breaking Rust's type safety:
#![allow(unused)] fn main() { // n.b. illegal example let external : &mut NumOrPointer; match external { &mut Pointer(ref mut internal) => { // This would violate safety and // write to memory at 0xdeadbeef *external = Num(0xdeadbeef); *internal = 12345; }, ... } }
As the Tock kernel is single threaded, it doesn't have race conditions and so in some cases it may be safe for there to be multiple references, as long as they do not point inside each other (as in the number/pointer example). But Rust doesn't know this, so its rules still hold. In practice, Rust's rules cause problems in event-driven code.
Issues with Borrowing in Event-Driven code
Event-driven code often requires multiple writeable references to the same object. Consider, for example, an event-driven embedded application that periodically samples a sensor and receives commands over a serial port. At any given time, this application can have two or three event callbacks registered: a timer, sensor data acquisition, and receiving a command. Each callback is registered with a different component in the kernel, and each of these components requires a reference to the object to issue a callback on. That is, the generator of each callback requires its own writeable reference to the application. Rust's rules, however, do not allow multiple mutable references.
Cells in Tock
Tock uses several Cell types for different data types. This table summarizes the various types, and more detail is included below.
| Cell Type | Best Used For | Example | Common Uses |
|---|---|---|---|
Cell | Primitive types | Cell<bool>, sched/kernel.rs | State variables (holding an enum), true/false flags, integer parameters like length. |
TakeCell | Small static buffers | TakeCell<'static, [u8]>, spi.rs | Holding static buffers that will receive or send data. |
MapCell | Large static buffers | MapCell<App>, spi.rs | Delegating reference to large buffers (e.g. application buffers). |
OptionalCell | Optional parameters | client: OptionalCell<&'static hil::nonvolatile_storage::NonvolatileStorageClient>, nonvolatile_to_pages.rs | Keeping state that can be uninitialized, like a Client before one is set. |
VolatileCell | Registers | VolatileCell<u32> | Accessing MMIO registers, used by tock_registers crate. |
The TakeCell abstraction
While the different memory containers each have specialized uses, most of their
operations are common across the different types. We therefore explain the basic
use of memory containers in the context of TakeCell, and the
additional/specialized functionality of each other type in its own section. From
tock/libraries/tock-cells/src/take_cell.rs:
A
TakeCellis a potential reference to mutable memory. Borrow rules are enforced by forcing clients to either move the memory out of the cell or operate on a borrow within a closure.
A TakeCell can be full or empty: it is like a safe pointer that can be null. If
code wants to operate on the data contained in the TakeCell, it must either move
the data out of the TakeCell (making it empty), or it must do so within a
closure with a map call. Using map passes a block of code for the TakeCell
to execute. Using a closure allows code to modify the contents of the TakeCell
inline, without any danger of a control path accidentally not replacing the
value. However, because it is a closure, a reference to the contents of the
TakeCell cannot escape.
TakeCell allows code to modify its contents when it has a normal (non-mutable) reference. This in turn means that if a structure stores its state in TakeCells, then code which has a regular (non-mutable) reference to the structure can change the contents of the TakeCell and therefore modify the structure. Therefore, it is possible for multiple callbacks to have references to the structure and modify its state.
Example use of .take() and .replace()
When TakeCell.take() is called, ownership of a location in memory moves out of
the cell. It can then be freely used by whoever took it (as they own it) and
then put back with TakeCell.put() or TakeCell.replace().
For example, this piece of code from chips/nrf51/src/clock.rs sets the
callback client for a hardware clock:
#![allow(unused)] fn main() { pub fn set_client(&self, client: &'static ClockClient) { self.client.replace(client); } }
If there is a current client, it's replaced with client. If self.client is
empty, then it's filled with client.
This piece of code from chips/sam4l/src/dma.rs cancels a current direct memory
access (DMA) operation, removing the buffer in the current transaction from the
TakeCell with a call to take:
#![allow(unused)] fn main() { pub fn abort_transfer(&self) -> Option<&'static mut [u8]> { self.registers .idr .write(Interrupt::TERR::SET + Interrupt::TRC::SET + Interrupt::RCZ::SET); // Reset counter self.registers.tcr.write(TransferCounter::TCV.val(0)); self.buffer.take() } }
Example use of .map()
Although the contents of a TakeCell can be directly accessed through a
combination of take and replace, Tock code typically uses TakeCell.map(),
which wraps the provided closure between a TakeCell.take() and
TakeCell.replace(). This approach has the advantage that a bug in control flow
that doesn't correctly replace won't accidentally leave the TakeCell empty.
Here is a simple use of map, taken from chips/sam4l/src/dma.rs:
#![allow(unused)] fn main() { pub fn disable(&self) { let registers: &SpiRegisters = unsafe { &*self.registers }; self.dma_read.map(|read| read.disable()); self.dma_write.map(|write| write.disable()); registers.cr.set(0b10); } }
Both dma_read and dma_write are of type TakeCell<&'static mut DMAChannel>,
that is, a TakeCell for a mutable reference to a DMA channel. By calling map,
the function can access the reference and call the disable function. If the
TakeCell has no reference (it is empty), then map does nothing.
Here is a more complex example use of map, taken from
chips/sam4l/src/spi.rs:
#![allow(unused)] fn main() { self.client.map(|cb| { txbuf.map(|txbuf| { cb.read_write_done(txbuf, rxbuf, len); }); }); }
In this example, client is a TakeCell<&'static SpiMasterClient>. The closure
passed to map has a single argument, the value which the TakeCell contains. So
in this case, cb is the reference to an SpiMasterClient. Note that the
closure passed to client.map then itself contains a closure, which uses cb
to invoke a callback passing txbuf.
.map() variants
TakeCell.map() provides a convenient method for interacting with a
TakeCell's stored contents, but it also hides the case when the TakeCell is
empty by simply not executing the closure. To allow for handling the cases when
the TakeCell is empty, rust (and by extension Tock) provides additional
functions.
The first is .map_or(). This is useful for returning a value both when the
TakeCell is empty and when it has a contained value. For example, rather than:
#![allow(unused)] fn main() { let return = if txbuf.is_some() { txbuf.map(|txbuf| { write_done(txbuf); }); Ok(()) } else { Err(ErrorCode::RESERVE) }; }
.map_or() allows us to do this instead:
#![allow(unused)] fn main() { let return = txbuf.map_or(Err(ErrorCode::RESERVE), |txbuf| { write_done(txbuf); Ok(()) }); }
If the TakeCell is empty, the first argument (the error code) is returned,
otherwise the closure is executed and Ok(()) is returned.
Sometimes we may want to execute different code based on whether the TakeCell
is empty or not. Again, we could do this:
#![allow(unused)] fn main() { if txbuf.is_some() { txbuf.map(|txbuf| { write_done(txbuf); }); } else { write_done_failure(); }; }
Instead, however, we can use the .map_or_else() function. This allows us to
pass in two closures, one for if the TakeCell is empty, and one for if it has
contents:
#![allow(unused)] fn main() { txbuf.map_or_else(|| { write_done_failure(); }, |txbuf| { write_done(txbuf); }); }
Note, in both the .map_or() and .map_or_else() cases, the first argument
corresponds to when the TakeCell is empty.
MapCell
A MapCell is very similar to a TakeCell in its purpose and interface. What
differs is the underlying implementation. In a TakeCell, when something
take()s the contents of the cell, the memory inside is actually moved. This is
a performance problem if the data in a TakeCell is large, but saves both
cycles and memory if the data is small (like a pointer or slice) because the
internal Option can be optimized in many cases and the code operates on
registers as opposed to memory. On the flip side, MapCells introduce some
accounting overhead for small types and require a minimum number of cycles to
access.
The commit that introduced MapCell includes some performance
benchmarks, but exact performance will vary based on the usage scenario.
Generally speaking, medium to large sized buffers should prefer MapCells.
OptionalCell
OptionalCell
is effectively a wrapper for a Cell that contains an Option, like:
#![allow(unused)] fn main() { struct OptionalCell { c: Cell<Option<T>>, } }
This to an extent mirrors the TakeCell interface, where the Option is hidden
from the user. So instead of my_optional_cell.get().map(|| {}), the code can
be: my_optional_cell.map(|| {}).
OptionalCell can hold the same values that Cell can, but can also be just
None if the value is effectively unset. Using an OptionalCell (like a
NumCell) makes the code clearer and hides extra tedious function calls. This
is particularly useful when a capsule needs to hold some mutable state
(therefore requiring a Cell) but there isn't a meaningful value to use in the
new() constructor.
Comparison to TakeCell
TakeCell and OptionalCell are quite similar, but the key differentiator is
the Copy bound required for items to use some of the methods defined on
OptionalCell, such as map(). The Copy bound enables safe "reentrant"
access to the stored value, because multiple accesses will be operating on
different copies of the same stored item. The semantic difference is the name: a
TakeCell is designed for something that must literally be taken, e.g. commonly
a buffer that is given to a different subsystem in a way not easily captured by
the Rust borrow mechanisms (commonly when a buffer is passed into, borrowed,
"by" a hardware peripheral, and returned when hardware event has filled the
buffer). #2360 has some examples where
trying to convert a TakeCell into an OptionalCell does not work.
VolatileCell
A VolatileCell is just a helper type for doing volatile reads and writes to a
value. This is mostly used for accessing memory-mapped I/O registers. The
get() and set() functions are wrappers around core::ptr::read_volatile()
and core::ptr::write_volatile().
Cell Extensions
In addition to custom types, Tock adds extensions to some of
the standard cells to enhance and ease usability. The mechanism here is to add
traits to existing data types to enhance their ability. To use extensions,
authors need only use kernel::common::cells::THE_EXTENSION to pull the new
traits into scope.
NumericCellExt
NumericCellExt
extends cells that contain "numeric" types (like usize or i32) to provide
some convenient functions (add() and subtract(), for example). This
extension makes for cleaner code when storing numbers that are increased or
decreased. For example, with a typical Cell, adding one to the stored value
looks like: my_cell.set(my_cell.get() + 1). With a NumericCellExt it is a
little easier to understand: my_cell.increment() (or my_cell.add(1)).
Tock Processes
This document explains how application code works in Tock. This is not a guide to writing applications, but rather documentation of the overall design of how applications are implemented in Tock.
Overview of Processes in Tock
Processes in Tock run application code meant to accomplish some type of task for the end user. Processes run in user mode. Unlike kernel code, which runs in supervisor mode and handles device drivers, chip-specific details, as well as general operating system tasks, application code running in processes is independent of the details of the underlying hardware (except the instruction set architecture). Unlike many existing embedded operating systems, in Tock processes are not compiled with the kernel. Instead they are entirely separate code that interact with the kernel and each other through system calls.
Since processes are not a part of the kernel, application code running in a process may be written in any language that can be compiled into code capable of running on a microcontroller. Tock supports running multiple processes concurrently. Co-operatively multiprogramming is the default, but processes may also be time sliced. Processes may share data with each other via Inter-Process Communication (IPC) through system calls.
Processes run code in unprivileged mode (e.g., user mode on Cortex-M or RV32I microcontrollers). The Tock kernel uses hardware memory protection (an MPU on CortexM and a PMP on RV32I) to restrict which addresses application code running in a process can access. A process makes system calls to access hardware peripherals or modify what memory is accessible to it.
Tock supports dynamically loading and unloading independently compiled applications. In this setting, applications do not know at compile time what address they will be installed at and loaded from. To be dynamically loadable, application code must be compiled as position independent code (PIC). This allows them to be run from any address they happen to be loaded into.
In some cases, applications may know their location at compile-time. This happens, for example, in cases where the kernel and applications are combined into a single cryptographically signed binary that is accepted by a secure bootloader. In these cases, compiling an application with explicit addresses works.
Tock supports running multiple processes at the same time. The maximum number of processes supported by the kernel is typically a compile-time constant in the range of 2-4, but is limited only by the available RAM and Flash resources of the chip. Tock scheduling generally assumes that it is a small number (e.g., uses O(n) scheduling algorithms).
System Calls
System calls are how processes and the kernel share data and interact. These could include commands to drivers, subscriptions to callbacks, granting of memory to the kernel so it can store data related to the application, communication with other application code, and many others. In practice, system calls are made through library code and the application need not deal with them directly.
For example, consider the following system call that sets a GPIO pin high:
int gpio_set(GPIO_Pin_t pin) {
return command(GPIO_DRIVER_NUM, 2, pin);
}
The command system call itself is implemented as the ARM assembly instruction
svc (service call):
int __attribute__((naked))
command(uint32_t driver, uint32_t command, int data) {
asm volatile("svc 2\nbx lr" ::: "memory", "r0");
}
A detailed description of Tock's system call API and ABI can be found in TRD104. The system call documentation describes how the are implemented in the kernel.
Upcalls and Termination
The Tock kernel is completely non-blocking, and it pushes this asynchronous behavior to userspace code. This means that system calls (with one exception) do not block. Instead, they always return very quickly. Long-running operations (e.g., sending data over a bus, sampling a sensor) signal their completion to userspace through upcalls. An upcall is a function call the kernel makes on userspace code.
Yield system calls are the exception to this non-blocking rule. The yield-wait system call blocks until the kernel invokes an upcall on the process. The kernel only invokes upcalls when a process issues the yield system call. The kernel does not invoke upcalls at arbitrary points in the program.
For example, consider the case of when a process wants to sleep for 100 milliseconds. The timer library might break this into three operations:
- It registers an upcall for the timer system call driver with a Subscribe system call.
- It tells the timer system call driver to issue an upcall in 100 milliseconds by invoking a Command system call.
- It calls the yield-wait system call. This causes the process to block until the timer upcall executes. The kernel pushes a stack frame onto the process to execute the upcall; this function call returns to the instruction after yield was invoked.
When a process registers an upcall with a call to a Subscribe system call, it
may pass a pointer userdata. The kernel does not access or use this data: it
simply passes it back on each invocation of the upcall. This allows a process to
register the same function as multiple upcalls, and distinguish them by the data
passed in the argument.
It is important to note that upcalls are not executed until a process calls
yield. The kernel will enqueue upcalls as events occur within the kernel,
but the application will not handle them until it yields.
Applications which are "finished" should call an Exit system call. There are two variants of Exit: exit-terminate and exit-restart. They differ in what they signal to the kernel: does the application wish to stop running, or be rebooted?
Inter-Process Communication
Inter-process communication (IPC) allows for separate processes to communicate directly through shared buffers. IPC in Tock is implemented with a service-client model. Each process can support one service. The service is identified by the name of the application running in the process, which is included in the Tock Binary Format Header for the application. A process can communicate with multiple services and will get a unique handle for each discovered service. Clients and services communicate through shared buffers. Each client can share some of its own application memory with the service and then notify the service to instruct it to parse the shared buffer.
Services
Services are named by the package name included in the app's TBF header. To
register a service, an app can call ipc_register_svc() to setup a callback.
This callback will be called whenever a client calls notify on that service.
Clients
Clients must first discover services they wish to use with the function
ipc_discover(). They can then share a buffer with the service by calling
ipc_share(). To instruct the service to do something with the buffer, the
client can call ipc_notify_svc(). If the app wants to get notifications from
the service, it must call ipc_register_client_cb() to receive events from when
the service when the service calls ipc_notify_client().
See ipc.h in libtock-c for more information on these functions.
Application Entry Point
An application specifies the first function the kernel should call by setting
the variable init_fn_offset in its TBF header. This function should have the
following signature:
void _start(void* text_start, void* mem_start, void* memory_len, void* app_heap_break);
Process RAM and Flash Memory
The actual process binary and TBF header are stored in nonvolatile flash. This flash region is fixed when the application is installed.
When a process is loaded by the kernel, the process is assigned a fixed, contiguous region of memory in RAM. This is the entire amount of memory the process can use during its entire lifetime. This region includes the typical memory regions for a process (i.e. stack, data, and heap), but also includes the kernel's grant region for the process and the process control block.
Process RAM is memory space divided between all running apps. The figure below shows the memory space of a process.
The Tock kernel tries to impart no requirements on how a process uses its own accessible memory. As such, a process starts in a very minimal environment, with an initial stack sufficient to support a syscall, but not much more. Application startup routines should first move their program break to accommodate their desired layout, and then setup local stack and heap tracking in accordance with their runtime.
Stack and Heap
Applications can specify their working memory requirements by setting the
minimum_ram_size variable in their TBF headers. Note that the Tock kernel
treats this as a minimum, depending on the underlying platform, the amount of
memory may be larger than requested, but will never be smaller.
If there is insufficient memory to load your application, the kernel will fail during loading and print a message.
If an application exceeds its allotted memory during runtime, the application will crash (see the Debugging section for an example).
Isolation
The kernel limits processes to only accessing their own memory regions by using hardware memory protection units. On Cortex-M platforms this is the MPU and on RV32I platforms this is the PMP (or ePMP).
Before doing a context switch to a process the kernel configures the memory protection unit for that process. Only the memory regions assigned to the process are set as accessible.
Flash Isolation
Processes cannot access arbitrary addresses in flash, including bootloader and kernel code. They are also prohibited from reading or writing the nonvolatile regions of other processes.
Processes do have access to their own memory in flash. Certain regions, including their Tock Binary Format (TBF) header and a protected region after the header, are read-only, as the kernel must be able to ensure the integrity of the header. In particular, the kernel needs to know the total size of the app to find the next app in flash. The kernel may also wish to store nonvolatile information about the app (e.g. how many times it has entered a failure state) that the app should not be able to alter.
The remainder of the app, and in particular the actual code of the app, is considered to be owned by the app. The app can read the flash to execute its own code. If the MCU uses flash for its nonvolatile memory the app can not likely directly modify its own flash region, as flash typically requires some hardware peripheral interaction to erase or write flash. In this case, the app would require kernel support to modify its flash region.
RAM Isolation
For the process's RAM region, the kernel maintains a brk pointer and gives the
process full access to only its memory region below that brk pointer. Processes
can use the Memop syscall to increase the brk pointer. Memop syscalls can
also be used by the process to inform the kernel of where it has placed its
stack and heap, but these are entirely used for debugging. The kernel does not
need to know how the process has organized its memory for normal operation.
All kernel-owned data on behalf of a process (i.e. grant and PCB) is stored at the top (i.e. highest addresses) of the process's memory region. Processes are never given any access to this memory, even though it is within the process's allocated memory region.
Processes can choose to explicitly share portions of their RAM with the kernel
through the use of Allow syscalls. This gives capsules read/write access to
the process's memory for use with a specific capsule operation.
Debugging
If an application crashes, Tock provides a very detailed stack dump. By default, when an application crashes Tock prints a crash dump over the platform's default console interface. When your application crashes, we recommend looking at this output very carefully: often we have spent hours trying to track down a bug which in retrospect was quite obviously indicated in the dump, if we had just looked at the right fields.
Note that because an application is relocated when it is loaded, the binaries
and debugging .lst files generated when the app was originally compiled will not
match the actual executing application on the board. To generate matching files
(and in particular a matching .lst file), you can use the make debug target
app directory to create an appropriate .lst file that matches how the
application was actually executed. See the end of the debug print out for an
example command invocation.
---| Fault Status |---
Data Access Violation: true
Forced Hard Fault: true
Faulting Memory Address: 0x00000000
Fault Status Register (CFSR): 0x00000082
Hard Fault Status Register (HFSR): 0x40000000
---| App Status |---
App: crash_dummy - [Fault]
Events Queued: 0 Syscall Count: 0 Dropped Callback Count: 0
Restart Count: 0
Last Syscall: None
╔═══════════╤══════════════════════════════════════════╗
║ Address │ Region Name Used | Allocated (bytes) ║
╚0x20006000═╪══════════════════════════════════════════╝
│ ▼ Grant 948 | 948
0x20005C4C ┼───────────────────────────────────────────
│ Unused
0x200049F0 ┼───────────────────────────────────────────
│ ▲ Heap 0 | 4700 S
0x200049F0 ┼─────────────────────────────────────────── R
│ Data 496 | 496 A
0x20004800 ┼─────────────────────────────────────────── M
│ ▼ Stack 72 | 2048
0x200047B8 ┼───────────────────────────────────────────
│ Unused
0x20004000 ┴───────────────────────────────────────────
.....
0x00030400 ┬─────────────────────────────────────────── F
│ App Flash 976 L
0x00030030 ┼─────────────────────────────────────────── A
│ Protected 48 S
0x00030000 ┴─────────────────────────────────────────── H
R0 : 0x00000000 R6 : 0x20004894
R1 : 0x00000001 R7 : 0x20004000
R2 : 0x00000000 R8 : 0x00000000
R3 : 0x00000000 R10: 0x00000000
R4 : 0x00000000 R11: 0x00000000
R5 : 0x20004800 R12: 0x12E36C82
R9 : 0x20004800 (Static Base Register)
SP : 0x200047B8 (Process Stack Pointer)
LR : 0x000301B7
PC : 0x000300AA
YPC : 0x000301B6
APSR: N 0 Z 1 C 1 V 0 Q 0
GE 0 0 0 0
EPSR: ICI.IT 0x00
ThumbBit true
Cortex-M MPU
Region 0: base: 0x20004000, length: 8192 bytes; ReadWrite (0x3)
Region 1: base: 0x30000, length: 1024 bytes; ReadOnly (0x6)
Region 2: Unused
Region 3: Unused
Region 4: Unused
Region 5: Unused
Region 6: Unused
Region 7: Unused
To debug, run `make debug RAM_START=0x20004000 FLASH_INIT=0x30059`
in the app's folder and open the .lst file.
Applications
For example applications, see the language specific userland repos:
- libtock-c: C and C++ apps.
- libtock-rs: Rust apps.
Scheduling
This describes how processes are scheduled by the Tock kernel.
Tock Scheduling
The kernel defines a Scheduler trait that the main kernel loop uses to
determine which process to execute next. Here is a simplified view of that
trait:
#![allow(unused)] fn main() { pub trait Scheduler { /// Decide which process to run next. fn next(&self) -> SchedulingDecision; /// Inform the scheduler of why the last process stopped executing, and how /// long it executed for. fn result(&self, result: StoppedExecutingReason, execution_time_us: Option<u32>); /// Tell the scheduler to execute kernel work such as interrupt bottom /// halves and dynamic deferred calls. Most schedulers will use the default /// implementation. unsafe fn execute_kernel_work(&self, chip: &C) {...} /// Ask the scheduler whether to take a break from executing userspace /// processes to handle kernel tasks. unsafe fn do_kernel_work_now(&self, chip: &C) -> bool {...} /// Ask the scheduler whether to continue trying to execute a process. /// Most schedulers will use this default implementation. unsafe fn continue_process(&self, _id: ProcessId, chip: &C) -> bool {...} } }
Individual boards can choose which scheduler to use, and implementing new schedulers just requires implementing this trait.
Process State
In Tock, a process can be in one of these states:
- Running: Normal operation. A Running process is eligible to be scheduled for execution, although is subject to being paused by Tock to allow interrupt handlers or other processes to run. During normal operation, a process remains in the Running state until it explicitly yields. Upcalls from other kernel operations are not delivered to Running processes (i.e. upcalls do not interrupt processes), rather they are enqueued until the process yields.
- Yielded: Suspended operation. A Yielded process will not be scheduled by Tock. Processes often yield while they are waiting for I/O or other operations to complete and have no immediately useful work to do. Whenever the kernel issues an upcall to a Yielded process, the process is transitioned to the Running state.
- YieldedFor: Suspended operation. Like a Yielded process, a YieldedFor process will not be scheduled by Tock. A YieldedFor process is waiting for a specific UpcallId (i.e., a specific upcall for a specific driver). The process will only be transitioned to the Running state when the kernel issues that specific upcall.
- Fault: Erroneous operation. A Fault-ed process will not be scheduled by Tock. Processes enter the Fault state by performing an illegal operation, such as accessing memory outside of their address space.
- Terminated: The process ended itself by calling the
Exitsystem call and the kernel has not restarted it. - Stopped: The process was running or yielded but was then explicitly stopped by the kernel (e.g., by the process console). A process in these states will not be made runnable until it is started, at which point it will continue execution where it was stopped.
Tock Startup
This document walks through how all of the components of Tock start up.
When a microcontroller boots (or resets, or services an interrupt) it loads an address for a function from a table indexed by interrupt type known as the vector table. The location of the vector table in memory is chip-specific, thus it is placed in a special section for linking.
Cortex-M microcontrollers expect a vector table to be at address 0x00000000. This can either be a software bootloader or the Tock kernel itself.
RISC-V gives hardware designers a great deal of design freedom for how booting works. Typically, after coming out of reset, a RISC-V processor will start executing out of ROM but this may be configurable. The HiFive1 board, for example, supports booting out ROM, One-Time programmable (OTP) memory or a QSPI flash controller.
Optional Bootloader
Many Tock boards (including Hail and imix) use a software bootloader that executes when the MCU first boots. The bootloader provides a way to talk to the chip over serial and to load new code, as well as potentially other administrative tasks. When the bootloader has finished, it tells the MCU that the vector table has moved (to a known address), and then jumps to a new address.
Tock first instructions
ARM Vector Table and IRQ table
On ARM chips, Tock splits the vector table into two sections, .vectors which
hold the first 16 entries, common to all ARM cores, and .irqs, which is
appended to the end and holds chip-specific interrupts.
In the source code then, the vector table will appear as an array that is marked
to be placed into the .vectors section.
In Rust, a vector table will look something like this:
#![allow(unused)] fn main() { #[link_section=".vectors"] #[used] // Ensures that the symbol is kept until the final binary pub static BASE_VECTORS: [unsafe extern fn(); 16] = [ _estack, // Initial stack pointer value tock_kernel_reset_handler, // Tock's reset handler function /* NMI */ unhandled_interrupt, // Generic handler function ... }
In C, a vector table will look something like this:
__attribute__ ((section(".vectors")))
interrupt_function_t interrupt_table[] = {
(interrupt_function_t) (&_estack),
tock_kernel_reset_handler,
NMI_Handler,
At the time of this writing (November 2018), typical chips (like the sam4l and
nrf52) use the same handler for all interrupts, and look something like:
#![allow(unused)] fn main() { #[link_section = ".vectors"] #[used] // Ensures that the symbol is kept until the final binary pub static IRQS: [unsafe extern "C" fn(); 80] = [generic_isr; 80]; }
RISC-V
All RISC-V boards are linked to run the _start function as the first function
that gets run before jumping to main. This is currently inline assembly as of
this writing:
#![allow(unused)] fn main() { #[cfg(all(target_arch = "riscv32", target_os = "none"))] #[link_section = ".riscv.start"] #[export_name = "_start"] #[naked] pub extern "C" fn _start() { unsafe { asm! (" }
Reset Handler
On boot, the MCU calls the reset handler function defined in vector table. In Tock, the implementation of the reset handler function is architecture specific and handles memory initialization.
Memory Initialization
The main operation the reset handler does is setup the kernel's memory by
copying it from flash. For the SAM4L, this is in the
initialize_ram_jump_to_main() function in arch/cortex-m/src/lib.rs. Once
finished the reset handler jumps to the main() function defined by each board.
The memory initialization function is implemented in assembly as Rust expects that memory is correctly initialized before any Rust instructions execute.
RISC-V Trap setup
The mtvec register needs to be set on RISC-V to handle traps. Setting of the
vectors is handled by chip specific functions. The common RISC-V trap handler is
_start_trap, defined in arch/rv32i/src/lib.rs.
MCU Setup
Any normal MCU initialization is typically handled next. This includes things like enabling the correct clocks or setting up DMA channels.
Peripheral and Capsule Initialization
After the MCU is set up, main initializes peripherals and capsules.
Peripherals are on-chip subsystems, such as UARTs, ADCs, and SPI buses; they are
chip-specific code that read and write memory-mapped I/O registers and are found
in the corresponding chips directory. While peripherals are chip-specific
implementations, they typically provide hardware-independent traits, called
hardware independent layer (HIL) traits, found in kernel/src/hil.
Capsules are software abstractions and services; they are chip-independent and
found in the capsules directory. For example, on the imix and hail platforms,
the SAM4L SPI peripheral is implemented in chips/sam4l/src/spi.rs, while the
capsule that virtualizes the SPI so multiple capsules can share it is in
capsules/src/virtual_spi.rs. This virtualizer can be chip-independent because
the chip-specific code implements the SPI HIL (kernel/src/hil/spi.rs). The
capsule that implements a system call API to the SPI for processes is in
capsules/src/spi.rs.
Boards that initialize many peripherals and capsules use the Component trait
to encapsulate this complexity from main. The Component trait
(kernel/src/component.rs) encapsulates any initialization a particular
peripheral, capsule, or set of capsules need inside a call to the function
finalize(). Changing what the build of the kernel includes involve changing
just which Components are initialized, rather than changing many lines of
main. Components are typically found in the components crate in the
/boards folder, but may also be board-specific and found inside a components
subdirectory of the board directory, e.g. boards/imix/src/imix_components.
Application Startup
Once the kernel components have been setup and initialized, the applications must be loaded. This procedure essentially iterates over the processes stored in flash, extracts and validates their Tock Binary Format header, and adds them to an internal array of process structs.
An example version of this loop is in kernel/src/process.rs as the
load_processes() function. After setting up pointers, it tries to create a
process from the starting address in flash and with a given amount of memory
remaining. If the header is validated, it tries to load the process into memory
and initialize all of the bookkeeping in the kernel associated with the process.
This can fail if the process needs more memory than is available on the chip. If
the process is successfully loaded the kernel importantly notes the address of
the application's entry function which is called when the process is started.
The load process loop ends when the kernel runs out of statically allocated memory to store processes in, available RAM for processes, or there is an invalid TBF header in flash.
Scheduler Execution
Tock provides a Scheduler trait that serves as an abstraction to allow for
plugging in different scheduling algorithms. Schedulers should be initialized at
the end of the reset handler. The final thing that the reset handler must do is
call kernel.kernel_loop(). This starts the Tock scheduler and the main
operation of the kernel.
Syscalls
This document explains how system calls work in Tock with regards to both the kernel and applications. TRD104 contains the more formal specification of the system call API and ABI for 32-bit systems. This document describes the considerations behind the system call design.
Overview of System Calls in Tock
System calls are the method used to send information from applications to the kernel. Rather than directly calling a function in the kernel, applications trigger a context switch to the kernel. The kernel then uses the values in registers and the stack at the time of the interrupt call to determine how to route the system call and which driver function to call with which data values.
Using system calls has three advantages. First, the act of triggering a service call interrupt can be used to change the processor state. Rather than being in unprivileged mode (as applications are run) and limited by the Memory Protection Unit (MPU), after the service call the kernel switches to privileged mode where it has full control of system resources (more detail on ARM processor modes).
Second, context switching to the kernel allows it to do other resource handling before returning to the application. This could include running other applications, servicing queued upcalls, or many other activities.
Finally, and most importantly, using system calls allows applications to be built independently from the kernel. The entire codebase of the kernel could change, but as long as the system call interface remains identical, applications do not even need to be recompiled to work on the platform. Applications, when separated from the kernel, no longer need to be loaded at the same time as the kernel. They could be uploaded at a later time, modified, and then have a new version uploaded, all without modifying the kernel running on a platform.
Tock System Call Types
Tock has 7 general types (i.e. "classes") of system calls:
| Syscall Class |
|---|
| Yield |
| Subscribe |
| Command |
| Read-Write Allow |
| Read-Only Allow |
| Memop |
| Exit |
All communication and interaction between applications and the kernel uses only these system calls.
Within these system calls, there are two general groups of syscalls: administrative and capsule-specific.
-
Administrative Syscalls: These adjust the execution or resources of the running process, and are handled entirely by the core kernel. These calls always behave the same way no matter which kernel resources are exposed to userspace. This group includes:
YieldMemopExit
-
Capsule-Specific Syscalls: These interact with specific capsules (i.e. kernel modules). While the general semantics are the same no matter the underlying capsule or resource being accessed, the actual behavior of the syscall depends on which capsule is being accessed. For example, a command to a timer capsule might start a timer, whereas a command to a temperature sensor capsule might start a temperature measurement. This group includes:
SubscribeCommandRead-Write AllowRead-Only Allow
All Tock system calls are synchronous, which means they immediately return to the application. Capsules must not implement long-running operations by blocking on a command system call, as this prevents other applications or kernel routines from running – kernel code is never preempted.
System Call Descriptions
This provides an introduction to each type of Tock system call. These are described in much more detail in TRD104.
-
Yield: An application yields its execution back to the kernel. The kernel will only trigger an upcall for a process after it has called yield. -
Memop: This group of "memory operations" allows a process to adjust its memory break (i.e. request more memory be available for the process to use), learn about its memory allocations, and provide debug information. -
Exit: An application can call exit to inform the kernel it no longer needs to execute and its resources can be freed. This also lets the process request a restart. -
Subscribe: An application can issue a subscribe system call to register upcalls, which are functions being invoked in response to certain events. These upcalls are similar in concept to UNIX signal handlers. A driver can request an application-provided upcall to be invoked. Every system call driver can provide multiple "subscribe slots", each of which the application can register a upcall to. -
Command: Applications can use command-type system calls to signal arbitrary events or send requests to the userspace driver. A common use-case for command-style systems calls is, for instance, to request that a driver start some long-running operation. -
Read-only Allow: An application may expose some data for drivers to read. Tock provides the read-only allow system call for this purpose: an application invokes this system call passing a buffer, the contents of which are then made accessible to the requested driver. Every driver can have multiple "allow slots", each of which the application can place a buffer in. -
Read-write Allow: Works similarly to read-only allow, but enables drivers to also mutate the application-provided buffer.
Data Movement Between Userspace and Kernel
All data movement and communication between userspace and the kernel happens through syscalls. This section describes the general mechanisms for data movement that syscalls enable. In this case, we use "data" to be very general and describe any form of information transfer.
Userspace → Kernel
Moving data from a userspace application to the kernel happens in two forms.
-
Instruction with simple options. Applications often want to instruct the kernel to take some action (e.g. play a sound, turn on an LED, or take a sensor reading). Some of these may require small amounts of configuration (e.g. which LED, or the resolution of the sensor reading). This data transfer is possible with the
Commandsyscall.There are two important considerations for
Command. First, the amount of data that can be transferred for configuration is on the order of 32 bits. Second,Commandis non-blocking, meaning theCommandsyscall will finish before the requested operation completes. -
Arbitrary buffers of data. Applications often need to pass data to the kernel for the kernel to use it for some action (e.g. audio samples to play, data packets to transmit, or data buffers to encrypt). This data transfer is possible with the "allow" family of syscalls, specifically the
Read-only allow.Once an application shares a buffer with the kernel via allow, the process should not use that buffer until it has "un-shared" the buffer with the kernel.
Kernel → Userspace
Moving data from the kernel to a userspace application to the kernel happens in three ways.
-
Small data that is synchronously available. The kernel may have status information or fixed values it can send to an application (e.g. how many packets have been sent, or the maximum resolution of an ADC). This can be shared via the return value to a
Commandsyscall. An application must call theCommandsyscall, and the return value must be immediately available, but the kernel can provide about 12 bytes of data back to the application via the return value to the command syscall. -
Arbitrary buffers of data. The kernel may have more data to send to application (e.g. an incoming data packet, or ADC readings). This data can be shared with the application by filling in a buffer the application has already shared with the kernel via an allow syscall. For the kernel to be able to modify the buffer, the application must have called the
Read-write allowsyscall. -
Events with small amounts of data. The kernel may need to notify an application about a recent event or provide small amounts of new data (e.g. a button was pressed, a sensor reading is newly available, or a incoming packet has arrived). This is accomplished by the kernel issuing an "upcall" to the application. You can think of an upcall as a callback, where when the process resumes running it executes a particular function provided with particular arguments.
For the kernel to be able to trigger an upcall, the process must have first called
Subscribeto pass the address of the function the upcall will execute.The kernel can pass a few arguments (roughly 12 bytes) with the upcall. This is useful for providing small amounts of data, like a reading sensor reading.
System Call Implementations
All system calls are implemented via context switches. A couple values are passed along with the context switch to indicate the type and manner of the syscall. A process invokes a system call by triggering context switch via a software interrupt that transitions the microcontroller to supervisor/kernel mode. The exact mechanism for this is architecture-specific. TRD104 specifies how userspace and the kernel pass values to each other for Cortex-M and RV32I platforms.
Handling a context switch is one of the few pieces of architecture-specific Tock
code. The code is located in lib.rs within the arch/ folder under the
appropriate architecture. As this code deals with low-level functionality in the
processor it is written in assembly wrapped as Rust function calls.
Context Switch Interface
The architecture crates (in the /arch folder) are responsible for implementing
the UserspaceKernelBoundary trait which defines the functions needed to allow
the kernel to correctly switch to userspace. These functions handle the
architecture-specific details of how the context switch occurs, such as which
registers are saved on the stack, where the stack pointer is stored, and how
data is passed for the Tock syscall interface.
Cortex-M Architecture Details
Starting in the kernel before any application has been run but after the process
has been created, the kernel calls switch_to_user. This code sets up registers
for the application, including the PIC base register and the process stack
pointer, then triggers a service call interrupt with a call to svc. The svc
handler code automatically determines if the system desired a switch to
application or to kernel and sets the processor mode. Finally, the svc handler
returns, directing the PC to the entry point of the app.
The application runs in unprivileged mode while executing. When it needs to use
a kernel resource it issues a syscall by running svc instruction. The
svc_handler determines that it should switch to the kernel from an app, sets
the processor mode to privileged, and returns. Since the stack has changed to
the kernel's stack pointer (rather than the process stack pointer), execution
returns to switch_to_user immediately after the svc that led to the
application starting. switch_to_user saves registers and returns to the kernel
so the system call can be processed.
On the next switch_to_user call, the application will resume execution based
on the process stack pointer, which points to the instruction after the system
call that switched execution to the kernel.
Syscalls may clobber userspace memory, as the kernel may write to buffers
previously given to it using Allow. The kernel will not clobber any userspace
registers except for the return value register (r0). However, Yield must be
treated as clobbering more registers, as it can call an upcall in userspace
before returning. This upcall can clobber r0-r3, r12, and lr. See
this comment
in the libtock-c syscall code for more information about Yield.
RISC-V Architecture Details
Tock assumes that a RISC-V platform that supports context switching has two privilege modes: machine mode and user mode.
The RISC-V architecture provides very lean support for context switching,
providing significant flexibility in software on how to support context
switches. The hardware guarantees the following will happen during a context
switch: when switching from kernel mode to user mode by calling the mret
instruction, the PC is set to the value in the mepc CSR, and the privilege
mode is set to the value in the MPP bits of the mstatus CSR. When switching
from user mode to kernel mode using the ecall instruction, the PC of the
ecall instruction is saved to the mepc CSR, the correct bits are set in the
mcause CSR, and the privilege mode is restored to machine mode. The kernel can
store 32 bits of state in the mscratch CSR.
Tock handles context switching using the following process. When switching to
userland, all register contents are saved to the kernel's stack. Additionally, a
pointer to a per-process struct of stored process state and the PC of where in
the kernel to resume executing after the process switches back to kernel mode
are stored to the kernel's stack. Then, the PC of the process to start executing
is put into the mepc CSR, the kernel stack pointer is saved in mscratch, and
the previous contents of the app's registers from the per-process stored state
struct are copied back into the registers. Then mret is called to switch to
user mode and begin executing the app.
An application calls a system call with the ecall instruction. This causes the
trap handler to execute. The trap handler checks mscratch, and if the value is
nonzero then it contains the stack pointer of the kernel and this trap must have
happened while the system was executing an application. Then, the kernel stack
pointer from mscratch is used to find the pointer to the stored state struct,
and all process registers are saved. The trap handler also saves the process PC
from the mepc CSR and the mcause CSR. It then loads the kernel address of
where to resume the context switching code to mepc and calls mret to exit
the trap handler. Back in the context switching code, the kernel restores its
registers from its stack. Then, using the contents of mcause the kernel
decides why the application stopped executing, and if it was a system call which
one it is. Returning the context switch reason ends the context switching
process.
All values for the system call functions are passed in registers a0-a4. No
values are stored to the application stack. The return value for system call is
set in a0. In most system calls the kernel will not clobber any userspace
registers except for this return value register (a0). However, the yield()
system call results in a upcall executing in the process. This can clobber all
caller saved registers, as well as the return address (ra) register.
Upcalls
The kernel can signal events to userspace via upcalls. Upcalls run a function in
userspace after a context switch. The kernel, as part of the upcall, provides
four 32 bit arguments. The address of the function to run is provided via the
Subscribe syscall.
Process Startup
Upon process initialization, the kernel starts executing a process by running an
upcall to the process's entry point. A single function call task is added to the
process's upcall queue. The function is determined by the ENTRY point in the
process TBF header (typically the _start symbol) and is passed the following
arguments in registers r0 - r3:
r0: the base address of the process coder1: the base address of the processes allocated memory regionr2: the total amount of memory in its regionr3: the current process memory break
How System Calls Connect to Capsules (Drivers)
After a system call is made, the call is handled and routed by the Tock kernel
in kernel.rs
through a series of steps.
-
For
Command,Subscribe,Read-Write Allow, andRead-Only Allowsystem calls, the kernel calls a platform-defined system call filter function. This function determines if the kernel should handle the system call or not.Yield,Exit, andMemopsystem calls are not filtered. This filter function allows the kernel to impose security policies that limit which system calls a process might invoke. The filter function takes the system call and which process issued the system call to return aResult<(), ErrorCode>to signal if the system call should be handled or if an error should be returned to the process. If the filter function disallows the system call it returnsErr(ErrorCode)and theErrorCodeis provided to the process as the return code for the system call. Otherwise, the system call proceeds. The filter interface is unstable and may be changed in the future. -
The kernel scheduler loop handles the
ExitandYieldsystem calls. -
To handle
Memopsystem calls, the scheduler loop invokes thememopmodule, which implements the Memop class. -
Command,Subscribe,Read-Write Allow, andRead-Only Allowfollow a more complex execution path because are implemented by drivers. To route these system calls, the scheduler loop calls a struct that implements theSyscallDriverLookuptrait. This trait has awith_driver()function that the driver number as an argument and returns either a reference to the corresponding driver orNoneif it is not installed. The kernel uses the returned reference to call the appropriate system call function on that driver with the remaining system call arguments.An example board that implements the
SyscallDriverLookuptrait looks something like this:#![allow(unused)] fn main() { struct TestBoard { console: &'static Console<'static, usart::USART>, } impl SyscallDriverLookup for TestBoard { fn with_driver<F, R>(&self, driver_num: usize, f: F) -> R where F: FnOnce(Option<&kernel::syscall::SyscallDriver>) -> R { match driver_num { 0 => f(Some(self.console)), // use capsules::console::DRIVER_NUM rather than 0 in real code _ => f(None), } } } }TestBoardthen supports one driver, the UART console, and maps it to driver number 0. Anycommand,subscribe, andallowsycalls to driver number 0 will get routed to the console, and all other driver numbers will returnErr(ErrorCode::NODEVICE).
Identifying Syscalls
A series of numbers and conventions identify syscalls as they pass via a context switch.
Syscall Class
The first identifier specifies which syscall it is. The values are specified as in the table and are fixed by convention.
| Syscall Class | Syscall Class Number |
|---|---|
| Yield | 0 |
| Subscribe | 1 |
| Command | 2 |
| Read-Write Allow | 3 |
| Read-Only Allow | 4 |
| Memop | 5 |
| Exit | 6 |
Driver Numbers
For capsule-specific syscalls, the syscall must be directed to the correct
capsule (driver). The with_driver() function takes an argument driver_num to
identify the driver.
To enable the kernel and userspace to agree, we maintain a list of known driver numbers.
To support custom capsules and driver, a driver_num whose highest bit is set
is private and can be used by out-of-tree drivers.
Syscall-Specific Numbers
For each capsule/driver, the driver can support more than one of each syscall (e.g. it can support multiple commands). Another number included in the context switch indicates which of the syscall the call refers to.
For the Command syscall, the command_num 0 is reserved as an existence
check: userspace can call a command for a driver with command_num 0 to check
if the driver is installed on the board. Otherwise, the numbers are entirely
driver-specific.
For Subscribe, Read-only allow, and Read-write allow, the numbers start at
0 and increment for each defined use of the various syscalls. There cannot be a
gap between valid subscribe or allow numbers. The actual meaning of each
subscribe or allow number is driver-specific.
Identifying Error and Return Types
Tock includes some defined types and conventions for errors and return values between the kernel and userspace. These allow the kernel to indicate success and failure to userspace.
Naming Conventions
*Code(e.g.ErrorCode,StatusCode): These types are mappings between numeric values and semantic meanings. These can always be encoded in ausize.*Return(e.g.SyscallReturn): These are more complex return types that can include arbitrary values, errors, or*Codetypes.
Type Descriptions
-
*CodeTypes:-
ErrorCode: A standard set of errors and their numeric representations in Tock. This is used to represent errors for syscalls, and elsewhere in the kernel. -
StatusCode: All errors inErrorCodeplus a Success value (represented by 0). This is used to pass a success/error status between the kernel and userspace.StatusCodeis a pseudotype that is not actually defined as a concrete Rust type. Instead, it is always encoded as ausize. Even though it is not a concrete type, it is useful to be able to return to it conceptually, so we give it the nameStatusCode.The intended use of
StatusCodeis to convey success/failure to userspace in upcalls. To try to keep things simple, we use the same numeric representations inStatusCodeas we do withErrorCode.
-
-
*ReturnTypes:SyscallReturn: The return type for a syscall. Includes whether the syscall succeeded or failed, optionally additional data values, and in the case of failure anErrorCode.
Tock Binary Format
Tock userspace applications must follow the Tock Binary Format (TBF). This format describes how the binary data representing a Tock app is formatted. A TBF Object has four parts:
- A header section: encodes metadata about the TBF Object
- The actual Userspace Binary
- An optional Footer section: encodes credentials for the TBF Object
- Padding (optional).
The general TBF format is structured as depicted:
Tock App Binary:
Start of app ─►┌──────────────────────┐◄┐ ◄┐ ◄┐
│ TBF Header │ │ Protected │ │
├──────────────────────┤ │ region │ │
│ Protected trailer │ │ │ Covered │
│ (Optional) │ │ │ by │
├──────────────────────┤◄┘ │ integrity │
│ │ │ │ Total
│ Userspace │ │ │ size
│ Binary │ │ │
│ │ │ │
│ │ │ │
│ │ │ │
├──────────────────────┤ ◄┘ │
│ TBF Footer │ │
│ (Optional) │ │
├──────────────────────┤ │
│ Padding (Optional) │ │
└──────────────────────┘ ◄┘
The Header is interpreted by the kernel (and other tools, like tockloader) to understand important aspects of the app. In particular, the kernel must know where in the application binary is the entry point that it should start executing when running the app for the first time.
The Header is encompassed in the Protected Region, which is the region at the beginning of the app that the app itself cannot access or modify at runtime. This provides a mechanism for the kernel to store persistent data on behalf of the app.
After the Protected Region the app is free to include whatever Userspace Binary it wants, and the format is completely up to the app. This is generally the output binary as created by a linker, but can include any additional binary data. This must include all data needed to actually execute the app. All support for relocations must be handled by the app itself, for example.
If the TBF Object has a Program Header in the Header section, the Userspace Binary can be followed by optional TBF Footers.
TBF Headers and Footers differ in how they are handled for TBF Object integrity. Integrity values (e.g., hashes) for a TBF Object are computed over the Protected Region section and Userspace Binary but not the Footer section or the padding after footers. TBF Headers are covered by integrity, while TBF Footers are not covered by integrity.
Finally, the TBF Object can be padded to a specific length. This is useful when a memory protection unit (MPU) restricts the length and offset of protection regions to powers of two. In such cases, padding allows a TBF Object to be padded to a power of two in size, so the next TBF Object is at a valid alignment.
TBF Design Requirements
The TBF format supports several design choices within the kernel, including:
- App discovery at boot
- Signed apps
- Extensibility and backwards compatibility
App Discovery
When the Tock kernel boots it must discover installed applications. The TBF format supports this by enabling a linked-list structure of apps, where TBF Objects in Tock are stored sequentially in flash memory. The start of TBF Object N+1 is immediately at the end of TBF Object N. The start of the first TBF Object is placed at a well-known address. The kernel then discovers apps by iterating through this array of TBF Objects.
To enable this, the TBF Header specifies the length of the TBF Object so that the kernel can find the start of the next one. If there is a gap between TBF Objects an "empty object" can be inserted to keep the structure intact.
Tock apps are typically stored in sorted order, from longest to shortest. This is to help match MPU rules about alignment.
A TBF Object can contain no code. A TBF Object can be marked as disabled to act as padding between other objects.
Signed Apps
TBF Objects can include a credential to provide integrity or other security properties. Credentials are stored in the TBF Footer. As credentials cannot include themselves, credentials are not computed over the TBF Footer.
The TBF Footer region can include any number of credentials.
TBF Headers and Footers Format
Both TBF Footers and Headers use a "TLV" (type-length-value) format. This means individual entries within the Header and Footer are self-identifying, and different applications can include different entries in the Header and Footer. This also simplifies adding new features to the TBF format over time, as new TLV objects can be defined.
In general, unknown TLVs should be ignored during parsing.
Both TBF Footers and Headers use the same format to simplify parsing.
TBF Header Section
The TBF Header section contains all of a TBF Object's headers. All TBF Objects have a Base Header and the Base Header is always first. All headers are a multiple of 4 bytes long; the TBF Header section is multiple of 4 bytes long.
After the Base Header come optional headers. Optional headers are structured as TLVs (type-length-values). Footers are encoded in the same way. Footers are also called headers for historical reasons: originally TBFs only had headers, and since footers follow the same format TBFs keep these types without changing their names.
TBF Header TLV Types
Each header is identified by a 16-bit number, as specified:
#![allow(unused)] fn main() { // Identifiers for the optional header structs. enum TbfHeaderTypes { TbfHeaderMain = 1, TbfHeaderWriteableFlashRegions = 2, TbfHeaderPackageName = 3, TbfHeaderPicOption1 = 4, TbfHeaderFixedAddresses = 5, TbfHeaderPermissions = 6, TbfHeaderPersistent = 7, TbfHeaderKernelVersion = 8, TbfHeaderProgram = 9, TbfHeaderShortId = 10, TbfFooterCredentials = 128, } }
Each header starts with the following TLV structure:
#![allow(unused)] fn main() { // Type-length-value header to identify each struct. struct TbfHeaderTlv { tipe: TbfHeaderTypes, // 16 bit specifier of which struct follows // When highest bit of the 16 bit specifier is set // it indicates out-of-tree (private) TLV entry length: u16, // Number of bytes of the following struct } }
TLV elements are aligned to 4 bytes. If a TLV element size is not 4-byte aligned, it will be padded with up to 3 bytes. Each element begins with a 16-bit type and 16-bit length followed by the element data:
0 2 4
+-------------+-------------+-----...---+
| Type | Length | Data |
+-------------+-------------+-----...---+
Typeis a 16-bit unsigned integer specifying the element type.Lengthis a 16-bit unsigned integer specifying the size of the data field in bytes.Datais the element specific data. The format for thedatafield is determined by itstype.
TBF Header Base
The TBF Header section contains a Base Header, followed by a sequence of type-length-value encoded elements. All fields in both the base header and TLV elements are little-endian. The base header is 16 bytes, and has 5 fields:
#![allow(unused)] fn main() { struct TbfHeaderV2Base { version: u16, // Version of the Tock Binary Format (currently 2) header_size: u16, // Number of bytes in the TBF header section total_size: u32, // Total padded size of the program image in bytes, including header flags: u32, // Various flags associated with the application checksum: u32, // XOR of all 4 byte words in the header, including existing optional structs } }
Encoding in flash:
0 2 4 6 8
+-------------+-------------+---------------------------+
| Version | Header Size | Total Size |
+-------------+-------------+---------------------------+
| Flags | Checksum |
+---------------------------+---------------------------+
-
Versiona 16-bit unsigned integer specifying the TBF header version. Always2. -
Header Sizea 16-bit unsigned integer specifying the length of the entire TBF header in bytes (including the base header and all TLV elements). -
Total Sizea 32-bit unsigned integer specifying the total size of the TBF in bytes (including the header). -
Flagsspecifies properties of the process.3 2 1 0 1 0 9 8 7 6 5 4 3 2 1 0 9 8 7 6 5 4 3 2 1 0 9 8 7 6 5 4 3 2 1 0 +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+ | Reserved |S|E| +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+- Bit 0 marks the process enabled. A
1indicates the process is enabled. Disabled processes will not be launched at startup. - Bit 1 marks the process as sticky. A
1indicates the process is sticky. Sticky processes require additional confirmation to be erased. For example,tockloaderrequires the--forceflag erase them. This is useful for services running as processes that should always be available. - Bits 2-31 are reserved and should be set to 0.
- Bit 0 marks the process enabled. A
-
Checksumthe result of XORing each 4-byte word in the header, excluding the word containing the checksum field itself.
Header TLVs
TBF may contain arbitrary element types. To avoid type ID collisions between elements defined by the Tock project and elements defined out-of-tree, the ID space is partitioned into two segments. Type IDs defined by the Tock project will have their high bit (bit 15) unset, and type IDs defined out-of-tree should have their high bit set.
1 Main
All apps must have either a Main header or a Program header. The Main header is deprecated in favor of the Program header.
#![allow(unused)] fn main() { // All apps must have a Main Header or a Program Header; it may have both. // Without either, the "app" is considered padding and used to insert an empty // linked-list element into the app flash space. If an app has both, it is the // kernel's decision which to use. Older kernels use Main Headers, while newer // (>= 2.1) kernels use Program Headers. struct TbfHeaderMain { base: TbfHeaderTlv, init_fn_offset: u32, // The function to call to start the application protected_trailer_size: u32, // The number of app-immutable bytes after the header minimum_ram_size: u32, // How much RAM the application is requesting } }
The Main element has three 32-bit fields:
0 2 4 6 8
+-------------+-------------+---------------------------+
| Type (1) | Length (12) | init_offset |
+-------------+-------------+---------------------------+
| protected_trailer_size | min_ram_size |
+---------------------------+---------------------------+
init_offsetthe offset in bytes from the beginning of binary payload (i.e. the actual application binary) that contains the first instruction to execute (typically the_startsymbol).protected_trailer_sizethe size of the protected region after the TBF headers. Processes do not have write access to the protected region. TBF headers are contained in the protected region, but are not counted towardsprotected_trailer_size. The protected region thus starts at the first byte of the TBF base header, and isheader_size + protected_trailer_sizebytes in size.minimum_ram_sizethe minimum amount of memory, in bytes, the process needs.
If the Main TLV header is not present, these values all default to 0.
The Main Header and Program Header have overlapping functionality. If a TBF Object has both, the kernel decides which to use. Tock is transitioning to having the Program Header as the standard one to use, but older kernels (2.0 and earlier) do not recognize it and use the Main Header.
2 Writeable Flash Region
#![allow(unused)] fn main() { // A defined flash region inside of the app's flash space. struct TbfHeaderWriteableFlashRegion { writeable_flash_region_offset: u32, writeable_flash_region_size: u32, } // One or more specially identified flash regions the app intends to write. struct TbfHeaderWriteableFlashRegions { base: TbfHeaderTlv, writeable_flash_regions: [TbfHeaderWriteableFlashRegion], } }
Writeable flash regions indicate portions of the binary that the process
intends to mutate in flash.
0 2 4 6 8
+-------------+-------------+---------------------------+
| Type (2) | Length | offset |
+-------------+-------------+---------------------------+
| size | ...
+---------------------------+
offsetthe offset from the beginning of the binary of the writeable region.sizethe size of the writeable region.
3 Package Name
#![allow(unused)] fn main() { // Optional package name for the app. struct TbfHeaderPackageName { base: TbfHeaderTlv, package_name: [u8], // UTF-8 string of the application name } }
The Package name specifies a unique name for the binary. Its only field is an
UTF-8 encoded package name.
0 2 4
+-------------+-------------+----------...-+
| Type (3) | Length | package_name |
+-------------+-------------+----------...-+
package_nameis an UTF-8 encoded package name
5 Fixed Addresses
#![allow(unused)] fn main() { // Fixed and required addresses for process RAM and/or process flash. struct TbfHeaderV2FixedAddresses { base: TbfHeaderTlv, start_process_ram: u32, start_process_flash: u32, } }
Fixed Addresses allows processes to specify specific addresses they need for
flash and RAM. Tock supports position-independent apps, but not all apps are
position-independent. This allows the kernel (and other tools) to avoid loading
a non-position-independent binary at an incorrect location.
0 2 4 6 8
+-------------+-------------+---------------------------+
| Type (5) | Length (8) | ram_address |
+-------------+-------------+---------------------------+
| flash_address |
+---------------------------+
ram_addressthe address in memory the process's memory address must start at. If a fixed address is not required this should be set to0xFFFFFFFF.flash_addressthe address in flash that the process binary (not the header) must be located at. This would match the value provided for flash to the linker. If a fixed address is not required this should be set to0xFFFFFFFF.
6 Permissions
#![allow(unused)] fn main() { struct TbfHeaderDriverPermission { driver_number: u32, offset: u32, allowed_commands: u64, } // A list of permissions for this app struct TbfHeaderV2Permissions { base: TbfHeaderTlv, length: u16, perms: [TbfHeaderDriverPermission], } }
The Permissions section allows an app to specify driver permissions that it is
allowed to use. All driver syscalls that an app will use must be listed. The
list should not include drivers that are not being used by the app.
The data is stored in the optional TbfHeaderV2Permissions field. This includes
an array of all the perms.
0 2 4 6
+-------------+-------------+-------------+---------...--+
| Type (6) | Length | # perms | perms |
+-------------+-------------+-------------+---------...--+
The perms array is made up of a number of elements of
TbfHeaderDriverPermission. The first 16-bit field in the TLV is the number of
driver permission structures included in the perms array. The elements in
TbfHeaderDriverPermission are described below:
Driver Permission Structure:
0 2 4 6 8
+-------------+-------------+---------------------------+
| driver_number | offset |
+-------------+-------------+---------------------------+
| allowed_commands |
+-------------------------------------------------------+
driver_numberis the number of the driver that is allowed. This for example could be0x00000to indicate that theAlarmsyscalls are allowed.allowed_commandsis a bit mask of the allowed commands. For example a value of0b0001indicates that only command 0 is allowed.0b0111would indicate that commands 2, 1 and 0 are all allowed. Note that this assumesoffsetis 0, for more details onoffsetsee below.- The
offsetfield inTbfHeaderDriverPermissionindicates the offset of theallowed_commandsbitmask. All of the examples described in the paragraph above assume anoffsetof 0. Theoffsetfield indicates the start of theallowed_commandsbitmask. Theoffsetis multiple by 64 (the size of theallowed_commandsbitmask). For example anoffsetof 1 and aallowed_commandsvalue of0b0001indicates that command 64 is allowed.
Subscribe and allow commands are always allowed as long as the specific
driver_number has been specified. If a driver_number has not been specified
for the capsule driver then allow and subscribe will be blocked.
Multiple TbfHeaderDriverPermission with the same driver_numer can be
included, so long as no offset is repeated for a single driver. When multiple
offsets and allowed_commandss are used they are ORed together, so that they
all apply.
7 Storage Permissions
#![allow(unused)] fn main() { // A list of storage permissions for accessing persistent storage struct TbfHeaderV2StoragePermissions { base: TbfHeaderTlv, write_id: u32, read_length: u16, read_ids: [u32], modify_length: u16, modify_ids: [u32], } }
The Storage Permissions section is used to identify what access the app has to
persistent storage.
The data is stored in the TbfHeaderV2StoragePermissions field, which includes
a write_id, a number of read_ids, and a number of modify_ids.
0 2 4 6 8
+-------------+-------------+---------------------------+
| Type (7) | Length | write_id |
+-------------+-------------+---------------------------+
| # Read IDs | read_ids (4 bytes each) |
+-------------+------------------------------------...--+
| # Modify IDs| modify_ids (4 bytes each) |
+--------------------------------------------------...--+
write_idindicates the id that all new persistent data is written with. All new data created will be stored with permissions from thewrite_idfield. For existing data see themodify_idssection below.write_iddoes not need to be unique, that is multiple apps can have the same id. Awrite_idof0x00indicates that the app can not perform write operations.read_idslist all of the ids that this app has permission to read. Theread_lengthspecifies the length of theread_idsin elements (not bytes).read_lengthcan be0indicating that there are noread_ids.modify_idslist all of the ids that this app has permission to modify or remove.modify_idsare different fromwrite_idin thatwrite_idapplies to new data whilemodify_idsallows modification of existing data. Themodify_lengthspecifies the length of themodify_idsin elements (not bytes).modify_lengthcan be0indicating that there are nomodify_idsand the app cannot modify existing stored data (even data that it itself wrote).
For example, consider an app that has a write_id of 1, read_ids of 2, 3
and modify_ids of 3, 4. If the app was to write new data, it would be stored
with id 1. The app is able to read data stored with id 2 or 3, note that
it cannot read the data that it writes. The app is also able to overwrite
existing data that was stored with id 3 or 4.
An example of when modify_ids would be useful is on a system where each app
logs errors in its own write_region. An error-reporting app reports these errors
over the network, and once the reported errors are acked erases them from the
log. In this case, modify_ids allow an app to erase multiple different
regions.
8 Kernel Version
#![allow(unused)] fn main() { // Kernel Version struct TbfHeaderV2KernelVersion { base: TbfHeaderTlv, major: u16, minor: u16 } }
The compatibility header is designed to prevent the kernel from running
applications that are not compatible with it.
It defines the following two items:
Kernel majororVis the kernel major number (for Tock 2.0, it is 2)Kernel minororvis the kernel minor number (for Tock 2.0, it is 0)
Apps defining this header are compatible with kernel version ^V.v (>= V.v and < (V+1).0).
The kernel version header refers only to the ABI and API exposed by the kernel itself, it does not cover API changes within drivers.
A kernel major and minor version guarantees the ABI for exchanging data between kernel and userspace and the the system call numbers.
0 2 4 6 8
+-------------+-------------+---------------------------+
| Type (8) | Length (4) | Kernel major| Kernel minor|
+-------------+-------------+---------------------------+
9 Program
#![allow(unused)] fn main() { // A Program Header specifies the end of the application binary within the // TBF, such that the application binary can be followed by footers. It also // has a version number, such that multiple versions of the same application // can be installed. pub struct TbfHeaderV2Program { init_fn_offset: u32, protected_trailer_size: u32, minimum_ram_size: u32, binary_end_offset: u32, version: u32, } }
A Program Header is an extended form of the Main Header. It adds two fields,
binary_end_offset and version. The binary_end_offset field allows the
kernel to identify where in the TBF object the application binary ends. The gap
between the end of the application binary and the end of the TBF object can
contain footers.
0 2 4 6 8
+-------------+-------------+---------------------------+
| Type (9) | Length (20) | init_offset |
+-------------+-------------+---------------------------+
| protected_trailer_size | min_ram_size |
+---------------------------+---------------------------+
| binary_end_offset | version |
+---------------------------+---------------------------+
init_offsetthe offset in bytes from the beginning of binary payload (i.e. the actual application binary) that contains the first instruction to execute (typically the_startsymbol).protected_trailer_sizethe size of the protected region after the TBF headers. Processes do not have write access to the protected region. TBF headers are contained in the protected region, but are not counted towardsprotected_trailer_size. The protected region thus starts at the first byte of the TBF base header, and isheader_size + protected_trailer_sizebytes in size.minimum_ram_sizethe minimum amount of memory, in bytes, the process needs.binary_end_offsetspecifies the offset from the beginning of the TBF Object at which the Userspace Binary ends and optional footers begin.versionspecifies a version number for the application implemented by the Userspace Binary. This allows a kernel to distinguish different versions of a given application.
If a Program header is not present, binary_end_offset can be considered to be
total_size of the Base Header and version is 0.
The Main Header and Program Header have overlapping functionality. If a TBF Object has both, the kernel decides which to use. Tock is transitioning to having the Program Header as the standard one to use, but older kernels (2.0 and earlier) do not recognize it and use the Main Header.
10 ShortID
#![allow(unused)] fn main() { struct TbfHeaderV2ShortId { base: TbfHeaderTlv, short_id: u32, } }
This header allows the compile-time workflow to specify a fixed ShortId the
kernel can use to assign a ShortId to this application. The header only includes
the 32 bit ShortId.
Note, fixed ShortIds are defined to be nonzero. Therefore, even if this header
is present, but with a short_id field of 0, the kernel will not be able to
assign a fixed ShortId of 0.
Also, this header is just one method for indicating what ShortId an
application should be assigned. The kernel must be configured to use this header
and any particular Tock kernel may ignore this header.
0 2 4 6 8
+-------------+-------------+---------------------------+
| Type (10) | Length (4) | short_id |
+-------------+-------------+---------------------------+
short_id: The 32 bit nonzero fixed ShortId.
128 Credentials Footer
#![allow(unused)] fn main() { // Credentials footer. The length field of the TLV determines the size of the // data slice. pub struct TbfFooterV2Credentials { format: u32, data: &'static [u8], } }
A Credentials Footer contains cryptographic credentials for the integrity and possibly identity of a Userspace Binary. A Credentials Footer has the following format:
0 2 4 6 8
+-------------+-------------+---------------------------+
| Type (128) | Length (4+n)| format |
+-------------+-------------+---------------------------+
| data |
+--------------------------------------------------...--+
The length of the data field is defined by the Length field. If the data field
is n bytes long, the Length field is 4+n. The format field defines the
format of the data field:
| Format Identifier | Credential Type | Credential Description |
|---|---|---|
| 0 | Reserved | |
| 1 | Rsa3072Key | A 384 byte RSA public key n and a 384 byte PKCS1.15 signature. |
| 2 | Rsa4096Key | A 512 byte RSA public key n and a 512 byte PKCS1.15 signature. |
| 3 | SHA256 | A SHA256 hash. |
| 4 | SHA384 | A SHA384 hash. |
| 5 | SHA512 | A SHA512 hash. |
| 0xA | RSA2048 | A 256 byte PKCS1.15 signature. |
Module Documentation
These pages document specific modules in the Tock codebase.
Process Console
process_console is a capsule that implements a small shell over the UART that
allows a terminal to inspect the kernel and control userspace processes.
Setup
Here is how to add process_console to a board's main.rs (the example is
taken from the microbit's implementation of the Process console):
#![allow(unused)] fn main() { let process_printer = components::process_printer::ProcessPrinterTextComponent::new() .finalize(components::process_printer_text_component_static!()); let _process_console = components::process_console::ProcessConsoleComponent::new( board_kernel, uart_mux, mux_alarm, process_printer, Some(reset_function), ) .finalize(components::process_console_component_static!( nrf52833::rtc::Rtc )); let _ = _process_console.start(); }
Using Process Console
With this capsule properly added to a board's main.rs and the Tock kernel
loaded to the board, make sure there is a serial connection to the board.
Likely, this just means connecting a USB cable from a computer to the board.
Next, establish a serial console connection to the board. An easy way to do this
is to run:
$ tockloader listen
[INFO ] No device name specified. Using default name "tock".
[INFO ] No serial port with device name "tock" found.
[INFO ] Found 2 serial ports.
Multiple serial port options found. Which would you like to use?
[0] /dev/ttyS4 - n/a
[1] /dev/ttyACM0 - "BBC micro:bit CMSIS-DAP" - mbed Serial Port
Which option? [0] 1
[INFO ] Using "/dev/ttyACM0 - "BBC micro:bit CMSIS-DAP" - mbed Serial Port".
[INFO ] Listening for serial output.
tock$
Commands
This module provides a simple text-based console to inspect and control which processes are running. The console has several commands:
help- prints the available commands and argumentslist- lists the current processes with their IDs and running statestatus- prints the current system statusstart n- starts the stopped process with name nstop n- stops the process with name nterminate n- terminates the running process with name n, moving it to the Terminated stateboot n- tries to restart a Terminated process with name nfault n- forces the process with name n into a fault statepanic- causes the kernel to run the panic handlerreset- causes the board to resetkernel- prints the kernel memory mapprocess n- prints the memory map of process with name nconsole-start- activate the process consoleconsole-stop- deactivate the process console
For the examples below we will have 2 processes on the board: blink (which
will blink all the LEDs that are connected to the kernel), and c_hello (which
prints 'Hello World' when the console is started). Also, a micro:bit v2 board
was used as support for the commands, so the results may vary on other devices.
We will assume that the user has a serial connection to the board, either by
using tockloader or another serial port software. With that console open, you
can issue commands.
help
To get a list of the available commands, use the help command:
tock$ help
Welcome to the process console.
Valid commands are: help status list stop start fault boot terminate process kernel panic
list
To see all of the processes on the board, use list:
tock$ list
PID Name Quanta Syscalls Restarts Grants State
0 blink 0 26818 0 1/14 Yielded
1 c_hello 0 8 0 1/14 Yielded
list Command Fields
PID: The identifier for the process. This can change if the process restarts.Name: The process name.Quanta: How many times this process has exceeded its allotted time quanta.Syscalls: The number of system calls the process has made to the kernel.Restarts: How many times this process has crashed and been restarted by the kernel.Grants: The number of grants that have been initialized for the process out of the total number of grants defined by the kernel.State: The state the process is in.
status
To get a general view of the system, use the status command:
tock$ status
Total processes: 2
Active processes: 2
Timeslice expirations: 0
start and stop
You can control processes with the start and stop commands:
tock$ stop blink
Process blink stopped
tock$ list
PID Name Quanta Syscalls Restarts Grants State
2 blink 0 22881 1 1/14 StoppedYielded
1 c_hello 0 8 0 1/14 Yielded
tock$ start blink
Process blink resumed.
tock$ list
PID Name Quanta Syscalls Restarts Grants State
2 blink 0 23284 1 1/14 Yielded
1 c_hello 0 8 0 1/14 Yielded
terminate and boot
You can kill a process with terminate and then restart it with boot:
tock$ terminate blink
Process blink terminated
tock$ list
PID Name Quanta Syscalls Restarts Grants State
2 blink 0 25640 1 0/14 Terminated
1 c_hello 0 8 0 1/14 Yielded
tock$ boot blink
tock$ list
PID Name Quanta Syscalls Restarts Grants State
3 blink 0 251 2 1/14 Yielded
1 c_hello 0 8 0 1/14 Yielded
fault
To force a process into a fault state, you should use the fault command:
tock$ fault blink
panicked at 'Process blink had a fault', kernel/src/process_standard.rs:412:17
Kernel version 899d73cdd
---| No debug queue found. You can set it with the DebugQueue component.
---| Cortex-M Fault Status |---
No Cortex-M faults detected.
---| App Status |---
𝐀𝐩𝐩: blink - [Faulted]
Events Queued: 0 Syscall Count: 2359 Dropped Upcall Count: 0
Restart Count: 0
Last Syscall: Yield { which: 1, address: 0x0 }
Completion Code: None
╔═══════════╤══════════════════════════════════════════╗
║ Address │ Region Name Used | Allocated (bytes) ║
╚0x20006000═╪══════════════════════════════════════════╝
│ Grant Ptrs 112
│ Upcalls 320
│ Process 920
0x20005AB8 ┼───────────────────────────────────────────
│ ▼ Grant 24
0x20005AA0 ┼───────────────────────────────────────────
│ Unused
0x200049FC ┼───────────────────────────────────────────
│ ▲ Heap 0 | 4260 S
0x200049FC ┼─────────────────────────────────────────── R
│ Data 508 | 508 A
0x20004800 ┼─────────────────────────────────────────── M
│ ▼ Stack 232 | 2048
0x20004718 ┼───────────────────────────────────────────
│ Unused
0x20004000 ┴───────────────────────────────────────────
.....
0x00040800 ┬─────────────────────────────────────────── F
│ App Flash 1996 L
0x00040034 ┼─────────────────────────────────────────── A
│ Protected 52 S
0x00040000 ┴─────────────────────────────────────────── H
R0 : 0x00000001 R6 : 0x000406B0
R1 : 0x00000000 R7 : 0x20004000
R2 : 0x0000000B R8 : 0x00000000
R3 : 0x0000000B R10: 0x00000000
R4 : 0x200047AB R11: 0x00000000
R5 : 0x200047AB R12: 0x20004750
R9 : 0x20004800 (Static Base Register)
SP : 0x20004778 (Process Stack Pointer)
LR : 0x00040457
PC : 0x0004045E
YPC : 0x0004045E
APSR: N 0 Z 0 C 1 V 0 Q 0
GE 0 0 0 0
EPSR: ICI.IT 0x00
ThumbBit true
Total number of grant regions defined: 14
Grant 0 : -- Grant 5 : -- Grant 10 : --
Grant 1 : -- Grant 6 : -- Grant 11 : --
Grant 2 0x0: 0x20005aa0 Grant 7 : -- Grant 12 : --
Grant 3 : -- Grant 8 : -- Grant 13 : --
Grant 4 : -- Grant 9 : --
Cortex-M MPU
Region 0: [0x20004000:0x20005000], length: 4096 bytes; ReadWrite (0x3)
Sub-region 0: [0x20004000:0x20004200], Enabled
Sub-region 1: [0x20004200:0x20004400], Enabled
Sub-region 2: [0x20004400:0x20004600], Enabled
Sub-region 3: [0x20004600:0x20004800], Enabled
Sub-region 4: [0x20004800:0x20004A00], Enabled
Sub-region 5: [0x20004A00:0x20004C00], Disabled
Sub-region 6: [0x20004C00:0x20004E00], Disabled
Sub-region 7: [0x20004E00:0x20005000], Disabled
Region 1: Unused
Region 2: [0x00040000:0x00040800], length: 2048 bytes; UnprivilegedReadOnly (0x2)
Sub-region 0: [0x00040000:0x00040100], Enabled
Sub-region 1: [0x00040100:0x00040200], Enabled
Sub-region 2: [0x00040200:0x00040300], Enabled
Sub-region 3: [0x00040300:0x00040400], Enabled
Sub-region 4: [0x00040400:0x00040500], Enabled
Sub-region 5: [0x00040500:0x00040600], Enabled
Sub-region 6: [0x00040600:0x00040700], Enabled
Sub-region 7: [0x00040700:0x00040800], Enabled
Region 3: Unused
Region 4: Unused
Region 5: Unused
Region 6: Unused
Region 7: Unused
To debug, run `make debug RAM_START=0x20004000 FLASH_INIT=0x4005d`
in the app's folder and open the .lst file.
𝐀𝐩𝐩: c_hello - [Yielded]
Events Queued: 0 Syscall Count: 8 Dropped Upcall Count: 0
Restart Count: 0
Last Syscall: Yield { which: 1, address: 0x0 }
Completion Code: None
╔═══════════╤══════════════════════════════════════════╗
║ Address │ Region Name Used | Allocated (bytes) ║
╚0x20008000═╪══════════════════════════════════════════╝
│ Grant Ptrs 112
│ Upcalls 320
│ Process 920
0x20007AB8 ┼───────────────────────────────────────────
│ ▼ Grant 76
0x20007A6C ┼───────────────────────────────────────────
│ Unused
0x20006A04 ┼───────────────────────────────────────────
│ ▲ Heap 0 | 4200 S
0x20006A04 ┼─────────────────────────────────────────── R
│ Data 516 | 516 A
0x20006800 ┼─────────────────────────────────────────── M
│ ▼ Stack 128 | 2048
0x20006780 ┼───────────────────────────────────────────
│ Unused
0x20006000 ┴───────────────────────────────────────────
.....
0x00041000 ┬─────────────────────────────────────────── F
│ App Flash 1996 L
0x00040834 ┼─────────────────────────────────────────── A
│ Protected 52 S
0x00040800 ┴─────────────────────────────────────────── H
R0 : 0x00000001 R6 : 0x00040C50
R1 : 0x00000000 R7 : 0x20006000
R2 : 0x00000000 R8 : 0x00000000
R3 : 0x00000000 R10: 0x00000000
R4 : 0x00040834 R11: 0x00000000
R5 : 0x20006000 R12: 0x200067F0
R9 : 0x20006800 (Static Base Register)
SP : 0x200067D0 (Process Stack Pointer)
LR : 0x00040A3F
PC : 0x00040A46
YPC : 0x00040A46
APSR: N 0 Z 0 C 1 V 0 Q 0
GE 0 0 0 0
EPSR: ICI.IT 0x00
ThumbBit true
Total number of grant regions defined: 14
Grant 0 : -- Grant 5 : -- Grant 10 : --
Grant 1 : -- Grant 6 : -- Grant 11 : --
Grant 2 : -- Grant 7 : -- Grant 12 : --
Grant 3 : -- Grant 8 : -- Grant 13 : --
Grant 4 0x1: 0x20007a6c Grant 9 : --
Cortex-M MPU
Region 0: [0x20006000:0x20007000], length: 4096 bytes; ReadWrite (0x3)
Sub-region 0: [0x20006000:0x20006200], Enabled
Sub-region 1: [0x20006200:0x20006400], Enabled
Sub-region 2: [0x20006400:0x20006600], Enabled
Sub-region 3: [0x20006600:0x20006800], Enabled
Sub-region 4: [0x20006800:0x20006A00], Enabled
Sub-region 5: [0x20006A00:0x20006C00], Enabled
Sub-region 6: [0x20006C00:0x20006E00], Disabled
Sub-region 7: [0x20006E00:0x20007000], Disabled
Region 1: Unused
Region 2: [0x00040800:0x00041000], length: 2048 bytes; UnprivilegedReadOnly (0x2)
Sub-region 0: [0x00040800:0x00040900], Enabled
Sub-region 1: [0x00040900:0x00040A00], Enabled
Sub-region 2: [0x00040A00:0x00040B00], Enabled
Sub-region 3: [0x00040B00:0x00040C00], Enabled
Sub-region 4: [0x00040C00:0x00040D00], Enabled
Sub-region 5: [0x00040D00:0x00040E00], Enabled
Sub-region 6: [0x00040E00:0x00040F00], Enabled
Sub-region 7: [0x00040F00:0x00041000], Enabled
Region 3: Unused
Region 4: Unused
Region 5: Unused
Region 6: Unused
Region 7: Unused
To debug, run `make debug RAM_START=0x20006000 FLASH_INIT=0x4085d`
in the app's folder and open the .lst file.
panic
You can also force a kernel panic with the panic command:
tock$ panic
panicked at 'Process Console forced a kernel panic.', capsules/src/process_console.rs:959:29
Kernel version 899d73cdd
---| No debug queue found. You can set it with the DebugQueue component.
---| Cortex-M Fault Status |---
No Cortex-M faults detected.
---| App Status |---
𝐀𝐩𝐩: blink - [Yielded]
Events Queued: 0 Syscall Count: 1150 Dropped Upcall Count: 0
Restart Count: 0
Last Syscall: Yield { which: 1, address: 0x0 }
Completion Code: None
╔═══════════╤══════════════════════════════════════════╗
║ Address │ Region Name Used | Allocated (bytes) ║
╚0x20006000═╪══════════════════════════════════════════╝
│ Grant Ptrs 112
│ Upcalls 320
│ Process 920
0x20005AB8 ┼───────────────────────────────────────────
│ ▼ Grant 24
0x20005AA0 ┼───────────────────────────────────────────
│ Unused
0x200049FC ┼───────────────────────────────────────────
│ ▲ Heap 0 | 4260 S
0x200049FC ┼─────────────────────────────────────────── R
│ Data 508 | 508 A
0x20004800 ┼─────────────────────────────────────────── M
│ ▼ Stack 232 | 2048
0x20004718 ┼───────────────────────────────────────────
│ Unused
0x20004000 ┴───────────────────────────────────────────
.....
0x00040800 ┬─────────────────────────────────────────── F
│ App Flash 1996 L
0x00040034 ┼─────────────────────────────────────────── A
│ Protected 52 S
0x00040000 ┴─────────────────────────────────────────── H
R0 : 0x00000001 R6 : 0x000406B0
R1 : 0x00000000 R7 : 0x20004000
R2 : 0x00000004 R8 : 0x00000000
R3 : 0x00000004 R10: 0x00000000
R4 : 0x200047AB R11: 0x00000000
R5 : 0x200047AB R12: 0x20004750
R9 : 0x20004800 (Static Base Register)
SP : 0x20004778 (Process Stack Pointer)
LR : 0x00040457
PC : 0x0004045E
YPC : 0x0004045E
APSR: N 0 Z 0 C 1 V 0 Q 0
GE 0 0 0 0
EPSR: ICI.IT 0x00
ThumbBit true
Total number of grant regions defined: 14
Grant 0 : -- Grant 5 : -- Grant 10 : --
Grant 1 : -- Grant 6 : -- Grant 11 : --
Grant 2 0x0: 0x20005aa0 Grant 7 : -- Grant 12 : --
Grant 3 : -- Grant 8 : -- Grant 13 : --
Grant 4 : -- Grant 9 : --
Cortex-M MPU
Region 0: [0x20004000:0x20005000], length: 4096 bytes; ReadWrite (0x3)
Sub-region 0: [0x20004000:0x20004200], Enabled
Sub-region 1: [0x20004200:0x20004400], Enabled
Sub-region 2: [0x20004400:0x20004600], Enabled
Sub-region 3: [0x20004600:0x20004800], Enabled
Sub-region 4: [0x20004800:0x20004A00], Enabled
Sub-region 5: [0x20004A00:0x20004C00], Disabled
Sub-region 6: [0x20004C00:0x20004E00], Disabled
Sub-region 7: [0x20004E00:0x20005000], Disabled
Region 1: Unused
Region 2: [0x00040000:0x00040800], length: 2048 bytes; UnprivilegedReadOnly (0x2)
Sub-region 0: [0x00040000:0x00040100], Enabled
Sub-region 1: [0x00040100:0x00040200], Enabled
Sub-region 2: [0x00040200:0x00040300], Enabled
Sub-region 3: [0x00040300:0x00040400], Enabled
Sub-region 4: [0x00040400:0x00040500], Enabled
Sub-region 5: [0x00040500:0x00040600], Enabled
Sub-region 6: [0x00040600:0x00040700], Enabled
Sub-region 7: [0x00040700:0x00040800], Enabled
Region 3: Unused
Region 4: Unused
Region 5: Unused
Region 6: Unused
Region 7: Unused
To debug, run `make debug RAM_START=0x20004000 FLASH_INIT=0x4005d`
in the app's folder and open the .lst file.
𝐀𝐩𝐩: c_hello - [Yielded]
Events Queued: 0 Syscall Count: 8 Dropped Upcall Count: 0
Restart Count: 0
Last Syscall: Yield { which: 1, address: 0x0 }
Completion Code: None
╔═══════════╤══════════════════════════════════════════╗
║ Address │ Region Name Used | Allocated (bytes) ║
╚0x20008000═╪══════════════════════════════════════════╝
│ Grant Ptrs 112
│ Upcalls 320
│ Process 920
0x20007AB8 ┼───────────────────────────────────────────
│ ▼ Grant 76
0x20007A6C ┼───────────────────────────────────────────
│ Unused
0x20006A04 ┼───────────────────────────────────────────
│ ▲ Heap 0 | 4200 S
0x20006A04 ┼─────────────────────────────────────────── R
│ Data 516 | 516 A
0x20006800 ┼─────────────────────────────────────────── M
│ ▼ Stack 128 | 2048
0x20006780 ┼───────────────────────────────────────────
│ Unused
0x20006000 ┴───────────────────────────────────────────
.....
0x00041000 ┬─────────────────────────────────────────── F
│ App Flash 1996 L
0x00040834 ┼─────────────────────────────────────────── A
│ Protected 52 S
0x00040800 ┴─────────────────────────────────────────── H
R0 : 0x00000001 R6 : 0x00040C50
R1 : 0x00000000 R7 : 0x20006000
R2 : 0x00000000 R8 : 0x00000000
R3 : 0x00000000 R10: 0x00000000
R4 : 0x00040834 R11: 0x00000000
R5 : 0x20006000 R12: 0x200067F0
R9 : 0x20006800 (Static Base Register)
SP : 0x200067D0 (Process Stack Pointer)
LR : 0x00040A3F
PC : 0x00040A46
YPC : 0x00040A46
APSR: N 0 Z 0 C 1 V 0 Q 0
GE 0 0 0 0
EPSR: ICI.IT 0x00
ThumbBit true
Total number of grant regions defined: 14
Grant 0 : -- Grant 5 : -- Grant 10 : --
Grant 1 : -- Grant 6 : -- Grant 11 : --
Grant 2 : -- Grant 7 : -- Grant 12 : --
Grant 3 : -- Grant 8 : -- Grant 13 : --
Grant 4 0x1: 0x20007a6c Grant 9 : --
Cortex-M MPU
Region 0: [0x20006000:0x20007000], length: 4096 bytes; ReadWrite (0x3)
Sub-region 0: [0x20006000:0x20006200], Enabled
Sub-region 1: [0x20006200:0x20006400], Enabled
Sub-region 2: [0x20006400:0x20006600], Enabled
Sub-region 3: [0x20006600:0x20006800], Enabled
Sub-region 4: [0x20006800:0x20006A00], Enabled
Sub-region 5: [0x20006A00:0x20006C00], Enabled
Sub-region 6: [0x20006C00:0x20006E00], Disabled
Sub-region 7: [0x20006E00:0x20007000], Disabled
Region 1: Unused
Region 2: [0x00040800:0x00041000], length: 2048 bytes; UnprivilegedReadOnly (0x2)
Sub-region 0: [0x00040800:0x00040900], Enabled
Sub-region 1: [0x00040900:0x00040A00], Enabled
Sub-region 2: [0x00040A00:0x00040B00], Enabled
Sub-region 3: [0x00040B00:0x00040C00], Enabled
Sub-region 4: [0x00040C00:0x00040D00], Enabled
Sub-region 5: [0x00040D00:0x00040E00], Enabled
Sub-region 6: [0x00040E00:0x00040F00], Enabled
Sub-region 7: [0x00040F00:0x00041000], Enabled
Region 3: Unused
Region 4: Unused
Region 5: Unused
Region 6: Unused
Region 7: Unused
To debug, run `make debug RAM_START=0x20006000 FLASH_INIT=0x4085d`
in the app's folder and open the .lst file.
reset
You can also reset the board with the reset command:
tock$ reset
kernel
You can view the kernel memory map with the kernel command:
tock$ kernel
Kernel version: 2.1 (build 899d73cdd)
╔═══════════╤══════════════════════════════╗
║ Address │ Region Name Used (bytes) ║
╚0x20003DAC═╪══════════════════════════════╝
│ BSS 11692
0x20001000 ┼─────────────────────────────── S
│ Relocate 0 R
0x20001000 ┼─────────────────────────────── A
│ ▼ Stack 4096 M
0x20000000 ┼───────────────────────────────
.....
0x0001A000 ┼─────────────────────────────── F
│ RoData 27652 L
0x000133FC ┼─────────────────────────────── A
│ Code 78844 S
0x00000000 ┼─────────────────────────────── H
process
You can also view the memory map for a process with the process command:
tock$ process c_hello
𝐀𝐩𝐩: c_hello - [Yielded]
Events Queued: 0 Syscall Count: 8 Dropped Upcall Count: 0
Restart Count: 0
Last Syscall: Yield { which: 1, address: 0x0 }
Completion Code: None
╔═══════════╤══════════════════════════════════════════╗
║ Address │ Region Name Used | Allocated (bytes) ║
╚0x20008000═╪══════════════════════════════════════════╝
│ Grant Ptrs 112
│ Upcalls 320
│ Process 920
0x20007AB8 ┼───────────────────────────────────────────
│ ▼ Grant 76
0x20007A6C ┼───────────────────────────────────────────
│ Unused
0x20006A04 ┼───────────────────────────────────────────
│ ▲ Heap 0 | 4200 S
0x20006A04 ┼─────────────────────────────────────────── R
│ Data 516 | 516 A
0x20006800 ┼─────────────────────────────────────────── M
│ ▼ Stack 128 | 2048
0x20006780 ┼───────────────────────────────────────────
│ Unused
0x20006000 ┴───────────────────────────────────────────
.....
0x00041000 ┬─────────────────────────────────────────── F
│ App Flash 1996 L
0x00040834 ┼─────────────────────────────────────────── A
│ Protected 52 S
0x00040800 ┴─────────────────────────────────────────── H
console-start
This command activates the process console so that it responds to commands and
shows the prompt. This reverses console-stop.
console-stop
This command puts the process console in a hibernation state. The console is
still running in the sense that it is receiving UART data, but it will not
respond to any commands other than console-start. It will also not show the
prompt.
The purpose of this mode is to "free up" the general UART console for apps that use the console extensively or interactively.
The console can be re-activated with console-start.
Features
Command History
You can use the up and down arrows to scroll through the command history and to
view the previous commands you have run. If you inserted more commands than the
command history can hold, oldest commands will be overwritten. You can view the
commands in bidirectional order, up arrow for oldest commands and down arrow
for newest.
If the user custom size for the history is set to 0, the history will be
disabled and the rust compiler will be able to optimize the binary file by
removing dead code. If you are typing a command and accidentally press the
up arrow key, you can press down arrow in order to retrieve the command you
were typing. If you scroll through the history and you want to edit a command
and accidentally press the up or down arrow key, scroll to the bottom of the
history and you will get back to the command you were typing.
Here is how to add a custom size for the command history used by the
ProcessConsole structure to keep track of the typed commands, in the main.rs
of boards:
#![allow(unused)] fn main() { const COMMAND_HISTORY_LEN : usize = 30; pub struct Platform { ... pconsole: &'static capsules::process_console::ProcessConsole< 'static, COMMAND_HISTORY_LEN, // or { capsules::process_console::DEFAULT_COMMAND_HISTORY_LEN } // for the default behaviour VirtualMuxAlarm<'static, nrf52840::rtc::Rtc<'static>>, components::process_console::Capability, >, ... } let _process_console = components::process_console::ProcessConsoleComponent::new( board_kernel, uart_mux, mux_alarm, process_printer, Some(reset_function), ) .finalize(components::process_console_component_static!( nrf52833::rtc::Rtc, COMMAND_HISTORY_LEN // or nothing for the default behaviour )); }
Note: In order to disable any functionality for the command history set the
COMMAND_HISTORY_LENto0or1(the history will be disabled for a size of1, because the first position from the command history is reserved for accidents by pressingupordownarrow key).
Command Navigation
Using Left and Right arrow keys you can navigate in a command, in order to
move the cursor to your desired position in a command. By pressing Home key
the cursor will be moved to the beginning of the command and by pressing End
key the cursor will be moved to the end of the command that is currently
displayed. When typing a character, it will be displayed under the cursor
(basically it will be inserted in the command at the cursor position). After
that the cursor will advance to next position (to the right). If you press
backspace the character before the cursor will be removed (the opposite action
of inserting a character) and the cursor will advance to left by one position.
Using Delete key, you can remove the cursor under the cursor. In this case the
cursor will not advance to any new position.
Pressing Enter in the middle of a command, is the same as pressing Enter at
the end of the command (basically you do not need to press End and then
Enter in order to send the command in order to be processed).
Note: These functions try to achieve the same experience as working in the bash terminal, moving freely in a command and modifying the command without rewriting it from the beginning.
Inserting multiple whitespace characters between commands or at the beginning of a command does not affect the resulting command, for example
# The command:
tock$ stop blink
# Will be interpreted as:
tock$ stop blink
Tock Networking Stack Design Document
NOTE: This document is a work in progress.
This document describes the design of the Networking stack on Tock.
The design described in this document is based off of ideas contributed by Phil Levis, Amit Levy, Paul Crews, Hubert Teo, Mateo Garcia, Daniel Giffin, and Hudson Ayers.
Table of Contents
This document is split into several sections. These are as follows:
-
Principles - Describes the main principles which the design of this stack intended to meet, along with some justification of why these principles matter. Ultimately, the design should follow from these principles.
-
Stack Diagram - Graphically depicts the layout of the stack
-
Explanation of queuing - Describes where packets are queued prior to transmission.
-
List of Traits - Describes the traits which will exist at each layer of the stack. For traits that may seem surprisingly complex, provide examples of specific messages that require this more complex trait as opposed to the more obvious, simpler trait that might be expected.
-
Explanation of Queuing - Describe queuing principles for this stack
-
Description of rx path
-
Description of the userland interface to the networking stack
-
Implementation Details - Describes how certain implementations of these traits will work, providing some examples with pseudocode or commented explanations of functionality
-
Example Message Traversals - Shows how different example messages (Thread or otherwise) will traverse the stack
Principles
-
Keep the simple case simple
- Sending an IP packet via an established network should not require a more complicated interface than send(destination, packet)
- If functionality were added to allow for the transmission of IP packets over the BLE interface, this IP send function should not have to deal with any options or MessageInfo structs that include 802.15.4 layer information.
- This principle reflects a desire to limit the complexity of Thread/the tock networking stack to the capsules that implement the stack. This prevents the burden of this complexity from being passed up to whatever applications use Thread
-
Layering is separate from encapsulation
- Libraries that handle encapsulation should not be contained within any specific layering construct. For example, If the Thread control unit wants to encapsulate a UDP payload inside of a UDP packet inside of an IP packet, it should be able to do so using encapsulation libraries and get the resulting IP packet without having to pass through all of the protocol layers
- Accordingly, implementations of layers can take advantage of these encapsulation libraries, but are not required to.
-
Dataplane traits are Thread-independent
- For example, the IP trait should not make any assumption that send() will be called for a message that will be passed down to the 15.4 layer, in case this IP trait is used on top of an implementation that passes IP packets down to be sent over a BLE link layer. Accordingly the IP trait can not expose any arguments regarding 802.15.4 security parameters.
- Even for instances where the only implementation of a trait in the near future will be a Thread-based implementation, the traits should not require anything that limit such a trait to Thread-based implementations
-
Transmission and reception APIs are decoupled
- This allows for instances where receive and send_done callbacks should be delivered to different clients (ex: Server listening on all addresses but also sending messages from specific addresses)
- Prevents send path from having to navigate the added complexity required for Thread to determine whether to forward received messages up the stack
Stack Diagram
IPv6 over ethernet: Non-Thread 15.4: Thread Stack: Encapsulation Libraries
+-------------------+-------------------+----------------------------+
| Application |-------------------\
----------------------------------------+-------------+---+----------+ \
|TCP Send| UDP Send |TCP Send| UDP Send | | TCP Send | | UDP Send |--\ v
+--------+----------+--------+----------+ +----------+ +----------+ \ +------------+ +------------+
| IP Send | IP Send | | IP Send | \ -----> | UDP Packet | | TCP Packet |
| | | +-------------------------+ \ / +------------+ +------------+
| | | | \ / +-----------+
| | | | -+-------> | IP Packet |
| | | THREAD | / +-----------+
| IP Send calls eth | IP Send calls 15.4| <--------|------> +-------------------------+
| 6lowpan libs with | 6lowpan libs with | | \ -------> | 6lowpan compress_Packet |
| default values | default values | | \ +-------------------------+
| | | | \ +-------------------------+
| | + +-----------| ------> | 6lowpan fragment_Packet |
| | | | 15.4 Send | +-------------------------+
|-------------------|-------------------+----------------------------+
| ethernet | IEEE 802.15.4 Link Layer |
+-------------------+------------------------------------------------+
Notes on the stack:
- IP messages sent via Thread networks are sent through Thread using an IP Send method that exposes only the parameters specified in the IP_Send trait. Other parameters of the message (6lowpan decisions, link layer parameters, many IP header options) are decided by Thread.
- The stack provides an interface for the application layer to send raw IPv6 packets over Thread.
- When the Thread control plane generates messages (MLE messages etc.), they are formatted using calls to the encapsulation libraries and then delivered to the 802.15.4 layer using the 15.4 send function
- This stack design allows Thread to control header elements from transport down to link layer, and to set link layer security parameters and more as required for certain packers
- The application can either directly send IP messages using the IP Send implementation exposed by the Thread stack or it can use the UDP Send and TCP send implementation exposed by the Thread stack. If the application uses the TCP or UDP send implementations it must use the transport packet library to insert its payload inside a packet and set certain header fields. The transport send method uses the IP Packet library to set certain IP fields before handing the packet off to Thread. Thread then sets other parameters at other layers as needed before sending the packet off via the 15.4 send function implemented for Thread.
- Note that currently this design leaves it up to the application layer to decide what interface any given packet will be transmitted from. This is because currently we are working towards a minimum functional stack. However, once this is working we intend to add a layer below the application layer that would handle interface multiplexing by destination address via a forwarding table. This should be straightforward to add in to our current design.
- This stack does not demonstrate a full set of functionality we are planning to implement now. Rather it demonstrates how this setup allows for multiple implementations of each layer based off of traits and libraries such that a flexible network stack can be configured, rather than creating a network stack designed such that applications can only use Thread.
Explanation of Queuing
Queuing happens at the application layer in this stack. The userland interface to the networking stack (described in greater detail in Networking_Userland.md) already handles queuing multiple packets sent from userland apps. In the kernel, any application which wishes to send multiple UDP packets must handle queuing itself, waiting for a send_done to return from the radio before calling send on the next packet in a series of packets.
List of Traits
This section describes a number of traits which must be implemented by any network stack. It is expected that multiple implementations of some of these traits may exist to allow for Tock to support more than just Thread networking.
Before discussing these traits - a note on buffers:
Prior implementations of the tock networking stack passed around references to
'static mut [u8]to pass packets along the stack. This is not ideal from a standpoint of wanting to be able to prevent as many errors as possible at compile time. The next iteration of code will pass 'typed' buffers up and down the stack. There are a number of packet library traits defined below (e.g. IPPacket, UDPPacket, etc.). Transport Layer traits will be implemented by a struct that will contain at least one field - a[u8]buffer with lifetime 'a. Lower level traits will simply contain payload fields that are Transport Level packet traits (thanks to a TransportPacket enum). This design allows for all buffers passed to be passed as type 'UDPPacket', 'IPPacket', etc. An added advantage of this design is that each buffer can easily be operated on using the library functions associated with this buffer type.
The traits below are organized by the network layer they would typically be associated with.
Transport Layer
Thus far, the only transport layer protocol implemented in Tock is UDP.
Documentation describing the structs and traits that define the UDP layer can be found in capsules/src/net/udp/(udp.rs, udp_send.rs, udp_recv.rs)
Additionally, a driver exists that provides a userland interface via which udp packets can be sent and received. This is described in greater detail in Networking_Userland.md
Network Stack Receive Path
- The radio in the kernel has a single
RxClient, which is set as the mac layer (awake_mac, typically) - The mac layer (i.e.
AwakeMac) has a singleRxClient, which is the mac_device(ieee802154::Framer::framer) - The Mac device has a single receive client -
MuxMac(virtual MAC device). - The
MuxMaccan have multiple "users" which are of typeMacUser - Any received packet is passed to ALL MacUsers, which are expected to filter packets themselves accordingly.
- Right now, we initialize two MacUsers in the kernel (in main.rs/components). These are the 'radio_mac', which is the MacUser for the RadioDriver that enables the userland interface to directly send 802154 frames, and udp_mac, the mac layer that is ultimately associated with the udp userland interface.
- The udp_mac MacUser has a single receive client, which is the
sixlowpan_statestruct sixlowpan_statehas a single rx_client, which in our case is a single struct that implements theip_receivetrait.- the
ip_receiveimplementing struct (IP6RecvStruct) has a single client, which is udp_recv, aUDPReceivestruct. - The UDPReceive struct is a field of the UDPDriver, which ultimately passes the packets up to userland.
So what are the implications of all this?
-
Currently, any userland app could receive udp packets intended for anyone else if the app implmenets 6lowpan itself on the received raw frames.
-
Currently, packets are only muxed at the Mac layer.
-
Right now the IPReceive struct receives all IP packets sent to the MAC address of this device, and soon will drop all packets sent to non-local addresses. Right now, the device effectively only has one address anyway, as we only support 6lowpan over 15.4, and as we haven't implemented a loopback interface on the IP_send path. If, in the future, we implement IP forwarding on Tock, we will need to add an IPSend object to the IPReceiver which would then retransmit any packets received that were not destined for local addresses.
Explanation of Configuration
This section describes how the IP stack can be configured, including setting addresses and other parameters of the MAC layer.
-
Source IP address: An array of local interfaces on the device is contained in main.rs. Currently, this array contains two hardcoded addresses, and one address generated from the unique serial number on the sam4l.
-
Destination IP address: The destination IP address is configured by passing the address to the send_to() call when sending IPv6 packets.
-
src MAC address: This address is configured in main.rs. Currently, the src mac address for each device is configured by default to be a 16-bit short address representing the last 16 bits of the unique 120 bit serial number on the sam4l. However, userland apps can change the src address by calling ieee802154_set_address()
-
dst MAC address: This is currently a constant set in main.rs. (DST_MAC_ADDR). In the future this will change, once Tock implements IPv6 Neighbor Discovery.
-
src pan: This is set via a constant configured in main.rs (PAN_ID). The same constant is used for the dst pan.
-
dst pan: Same as src_pan. If we need to support use of the broadcast PAN as a dst_pan, this may change.
-
radio channel: Configured as a constant in main.rs (RADIO_CHANNEL).
Tock Userland Networking Design
This section describes the current userland interface for the networking stack on Tock. This section should serve as a description of the abstraction provided by libTock - what the exact system call interface looks like or how libTock or the kernel implements this functionality is out-of-scope of this document.
Overview
The Tock networking stack and libTock should attempt to expose a networking interface that is similar to the POSIX networking interface. The primary motivation for this design choice is that application programmers are used to the POSIX networking interface design, and significant amounts of code have already been written for POSIX-style network interfaces. By designing the libTock networking interface to be as similar to POSIX as possible, we hope to improve developer experience while enabling the easy transition of networking code to Tock.
Design
udp.c and udp.h in libtock-c/libtock define the userland interface to the Tock networking stack. These files interact with capsules/src/net/udp/driver.rs in the main tock repository. driver.rs implements an interface for sending and receiving UDP messages. It also exposes a list of interace addresses to the application layer. The primary functionality embedded in the UDP driver is within the allow(), subscribe(), and command() calls which can be made to the driver.
Details of this driver can be found in doc/syscalls folder
udp.c and udp.h in libtock-c make it easy to interact with this driver interface. Important functions available to userland apps written in c include:
udp_socket() - sets the port on which the app will receive udp packets, and
sets the src_port of outgoing packets sent via that socket. Once socket
binding is implemented in the kernel, this function will handle reserving ports
to listen on and send from.
udp_close() - currently just returns success, but once socket binding has been
implemented in the kernel, this function will handle freeing bound ports.
udp_send_to() - Sends a udp packet to a specified addr/port pair, returns the
result of the tranmission once the radio has transmitted it (or once a failure
has occured).
udp_recv_from_sync() - Pass an interface to listen on and an incoming source
address to listen for. Sets up a callback to wait for a received packet, and
yeilds until that callback is triggered. This function never returns if a packet
is not received.
udp_recv_from() - Pass an interface to listen on and an incoming source
address to listen for. However, this takes in a buffer to which the received
packet should be placed, and returns the callback that will be triggered when a
packet is received.
udp_list_ifaces() - Populates the passed pointer of ipv6 addresses with the
available ipv6 addresses of the interfaces on the device. Right now this merely
returns a constant hardcoded into the UDP driver, but should change to return
the source IP addresses held in the network configuration file once that is
created. Returns up to len addresses.
Other design notes:
The current design of the driver has a few limitations, these include:
-
Currently, any app can listen on any address/port pair
-
The current tx implementation allows for starvation, e.g. an app with an earlier app ID can starve a later ID by sending constantly.
POSIX Socket API Functions
Below is a fairly comprehensive overview of the POSIX networking socket interface. Note that much of this functionality pertains to TCP or connection- based protocols, which we currently do not handle.
-
socket(domain, type, protocol) -> int fddomain: AF_INET, AF_INET6, AF_UNIXtype: SOCK_STREAM (TCP), SOCK_DGRAM (UDP), SOCK_SEQPACKET (?), SOCK_RAWprotocol: IPPROTO_TCP, IPPROTO_SCTP, IPPROTO_UDP, IPPROTO_DCCP
-
bind(socketfd, my_addr, addrlen) -> int successsocketfd: Socket file descriptor to bind tomy_addr: Address to bind onaddrlen: Length of address
-
listen(socketfd, backlog) -> int successsocketfd: Socket file descriptorbacklog: Number of pending connections to be queued
Only necessary for stream-oriented data modes
-
connect(socketfd, addr, addrlen) -> int successsocketfd: Socket file descriptor to connect withaddr: Address to connect to (server protocol address)addrlen: Length of address
When used with connectionless protocols, defines the remote address for sending and receiving data, allowing the use of functions such as
send()andrecv()and preventing the reception of datagrams from other sources. -
accept(socketfd, cliaddr, addrlen) -> int successsocketfd: Socket file descriptor of the listening socket that has the connection queuedcliaddr: A pointer to an address to receive the client's address informationaddrlen: Specifies the size of the client address structure
-
send(socketfd, buffer, length, flags) -> int successsocketfd: Socket file descriptor to send onbuffer: Buffer to sendlength: Length of buffer to sendflags: Various flags for the transmission
Note that the
send()function will only send a message when thesocketfdis connected (including for connectionless sockets) -
sendto(socketfd, buffer, length, flags, dst_addr, addrlen) -> int successsocketfd: Socket file descriptor to send onbuffer: Buffer to sendlength: Length of buffer to sendflags: Various flags for the transmissiondst_addr: Address to send to (ignored for connection type sockets)addrlen: Length ofdst_addr
Note that if the socket is a connection type, dst_addr will be ignored.
-
recv(socketfd, buffer, length, flags)socketfd: Socket file descriptor to receive onbuffer: Buffer where the message will be storedlength: Length of bufferflags: Type of message reception
Typically used with connected sockets as it does not permit the application to retrieve the source address of received data.
-
recvfrom(socketfd, buffer, length, flags, address, addrlen)socketfd: Socket file descriptor to receive onbuffer: Buffer to store the messagelength: Length of the bufferflags: Various flags for receptionaddress: Pointer to a structure to store the sending addressaddrlen: Length of address structure
Normally used with connectionless sockets as it permits the application to retrieve the source address of received data
-
close(socketfd)socketfd: Socket file descriptor to delete
-
gethostbyname()/gethostbyaddr()Legacy interfaces for resolving host names and addresses -
select(nfds, readfds, writefds, errorfds, timeout)nfds: The range of file descriptors to be tested (0..nfds)readfds: On input, specifies file descriptors to be checked to see if they are ready to be read. On output, indicates which file descriptors are ready to be readwritefds: Same as readfds, but for writingerrorfds: Same as readfds, writefds, but for errorstimeout: A structure that indicates the max amount of time to block if no file descriptors are ready. If None, blocks indefinitely
-
poll(fds, nfds, timeout)fds: Array of structures for file descriptors to be checked. The array members are structures which contain the file descriptor, and events to check for plus areas to write which events occurrednfds: Number of elements in the fds arraytimeout: If 0 return immediately, or if -1 block indefinitely. Otherwise, wait at leasttimeoutmilliseconds for an event to occur
-
getsockopt()/setsockopt()
Tock Userland API
Below is a list of desired functionality for the libTock userland API.
-
struct sock_addr_tipv6_addr_t: IPv6 address (single or ANY)port_t: Transport level port (single or ANY) -
struct sock_handle_tOpaque to the user; allocated in userland by malloc (or on the stack) -
list_ifaces() -> iface[]ifaces: A list ofipv6_addr_t, namepairs corresponding to all interfaces available -
udp_socket(sock_handle_t, sock_addr_t) -> int socketfdsocketfd: Socket object to be initialized as a UDP socket with the given address informationsock_addr_t: Contains an IPv6 address and a port -
udp_close(sock_handle_t)sock_handle_t: Socket to close -
send_to(sock_handle_t, buffer, length, sock_addr_t)sock_handle_t: Socket to send usingbuffer: Buffer to sendlength: Length of buffer to sendsock_addr_t: Address struct (IPv6 address, port) to send the packet from
-
recv_from(sock_handle_t, buffer, length, sock_addr_t)sock_handle_t: Receiving socketbuffer: Buffer to receive intolength: Length of buffersock_addr_t: Struct where the kernel writes the received packet's sender information
Differences Between the APIs
There are two major differences between the proposed Tock APIs and the standard
POSIX APIs. First, the POSIX APIs must support connection-based protocols such
as TCP, whereas the Tock API is only concerned with connectionless, datagram
based protocols. Second, the POSIX interface has a concept of the sock_addr_t
structure, which is used to encapsulate information such as port numbers to bind
on and interface addresses. This makes bind_to_port redundant in POSIX, as we
can simply set the port number in the sock_addr_t struct when binding. I think
one of the major questions is whether to adopt this convention, or to use the
above definitions for at least the first iteration.
Example: ip_sense
An example use of the userland networking stack can be found in libtock-c/examples/ip_sense
Implementation Details for potential future Thread implementation
This section was written when the networking stack was incomplete, and aspects may be outdated. This goes for all sections following this point in the document.
The Thread specification determines an entire control plane that spans many different layers in the OSI networking model. To adequately understand the interactions and dependencies between these layers' behaviors, it might help to trace several types of messages and see how each layer processes the different types of messages. Let's trace carefully the way OpenThread handles messages.
We begin with the most fundamental message: a data-plane message that does not interact with the Thread control plane save for passing through a Thread-defined network interface. Note that some of the procedures in the below traces will not make sense when taken independently: the responsibility-passing will only make sense when all the message types are taken as a whole. Additionally, no claim is made as to whether or not this sequence of callbacks is the optimal way to express these interactions: it is just OpenThread's way of doing it.
Data plane: IPv6 datagram
- Upper layer (application) wants to send a payload
- Provides payload
- Specifies the IP6 interface to send it on (via some identifier)
- Specifies protocol (IP6 next header field)
- Specifies destination IP6 address
- Possibly doesn't specify source IP6 address
- IP6 interface dispatcher (with knowledge of all the interfaces) fills in the IP6 header and produces an IP6 message
- Payload, protocol, and destination address used directly from the upper layer
- Source address is more complicated
- If the address is specified and is not multicast, it is used directly
- If the address is unspecified or multicast, source address is determined from the specific IP6 selected AND the destination address via a matching scheme on the addresses associated with the interface.
- Now that the addresses are determined, the IP6 layer computes the pseudoheader
checksum.
- If the application layer's payload has a checksum that includes the pseudoheader (UDP, ICMP6), this partial checksum is now used to update the checksum field in the payload.
- The actual IP6 interface (Thread-controlled) tries to send that message
- First step is to determine whether the message can be sent immediately or not (sleepy child or not). This passes the message to the scheduler. This is important for sleepy children where there is a control scheme that determines when messages are sent.
- Next, determine the MAC src/dest addresses.
- If this is a direct transmission, there is a source matching scheme to determine if the destination address used should be short or long. The same length is used for the source MAC address, obtained from the MAC interface.
- Notify the MAC layer to notify you that your message can be sent.
- The MAC layer schedules its transmissions and determines that it can send the above message
- MAC sets the transmission power
- MAC sets the channel differently depending on the message type
- The IP6 interface fills up the frame. This is the chance for the IP6 interface to do things like fragmentation, retransmission, and so on. The MAC layer just wants a frame.
- XXX: The IP6 interface fills up the MAC header. This should really be the
responsibility of the MAC layer. Anyway, here is what is done:
- Channel, source PAN ID, destination PAN ID, and security modes are determined by message type. Note that the channel set by the MAC layer is sometimes overwritten.
- A mesh extension header is added for some messages. (eg. indirect transmissions)
- The IP6 message is then 6LoWPAN-compressed/fragmented into the payload section of the frame.
- The MAC layer receives the raw frame and tries to send it
- MAC sets the sequence number of the frame (from the previous sequence number for the correct link neighbor), if it is not a retransmission
- The frame is secured if needed. This is another can of worms:
- Frame counter is dependent on the link neighbor and whether or not the frame is a retransmission
- Key is dependent on which key id mode is selected, and also the link neighbor's key sequence
- Key sequence != frame counter
- One particular mode requires using a key, source and frame counter that is a Thread-defined constant.
- The frame is transmitted, an ACK is waited for, and the process completes.
As you can see, the data dependencies are nowhere as clean as the OSI model dictates. The complexity mostly arises because
- Layer 4 checksum can include IPv6 pseudoheader
- IP6 source address (mesh local? link local? multicast?) is determined by interface and destination address
- MAC src/dest addresses are dependent on the next device on the route to the IP6 destination address
- Channel, src/dest PAN ID, security is dependent on message type
- Mesh extension header presence is dependent on message type
- Sequence number is dependent on message type and destination
Note that all of the MAC layer dependencies in step 5 can be pre-decided so that the MAC layer is the only one responsible for writing the MAC header.
This gives a pretty good overview of what minimally needs to be done to even be able to send normal IPv6 datagrams, but does not cover all of Thread's complexities. Next, we look at some control-plane messages.
Control plane: MLE messages
- The MLE layer encapsulates its messages in UDP on a constant port
- Security is determined by MLE message type. If MLE-layer security is required, the frame is secured using the same CCM* encryption scheme used in the MAC layer, but with a different key discipline.
- MLE key sequence is global across a single Thread device
- MLE sets IP6 source address to the interface's link local address
- This UDP-encapsulated MLE message is sent to the IP6 dispatch again
- The actual IP6 interface (Thread-controlled) tries to send that message
- The MAC layer schedules the transmission
- The IP6 interface fills up the frame.
- MLE messages disable link-layer security when MLE-layer security is present. However, if link-layer security is disabled and the MLE message doesn't fit in a single frame, link-layer security is enabled so that fragmentation can proceed.
- The MAC layer receives the raw frame and tries to send it
The only cross-layer dependency introduced by the MLE layer is the dependency between MLE-layer security and link-layer security. Whether or not the MLE layer sits atop an actual UDP socket is an implementation detail.
Control plane: Mesh forwarding
If Thread REED devices are to be eventually supported in Tock, then we must also consider this case. If a frame is sent to a router which is not its final destination, then the router must forward that message to the next hop.
- The MAC layer receives a frame, decrypts it and passes it to the IP6 interface
- The IP6 reception reads the frame and realizes that it is an indirect transmission that has to be forwarded again
- The frame must contain a mesh header, and the HopsLeft field in it should be decremented
- The rest of the payload remains the same
- Hence, the IP6 interface needs to send a raw 6LoWPAN-compressed frame
- The IP6 transmission interface receives a raw 6LoWPAN-compressed frame to be transmitted again
- This frame must still be scheduled: it might be destined for a sleepy device that is not yet awake
- The MAC layer schedules the transmission
- The IP6 transmission interface copies the frame to be retransmitted verbatim, but with the modified mesh header and a new MAC header
- The MAC layer receives the raw frame and tries to send it
This example shows that the IP6 transmission interface may need to handle more message types than just IP6 datagrams: there is a case where it is convenient to be able to handle a datagram that is already 6LoWPAN compressed.
Control plane: MAC data polling
From time to time, a sleepy edge device will wake up and begin polling its parent to check if any frames are available for it. This is done via a MAC command frame, which must still be sent through the transmission pipeline with link security enabled (Key ID mode 1). OpenThread does this by routing it through the IP6 transmission interface, which arguably isn't the right choice.
- Data poll manager send a data poll message directly to the IP6 transmission interface, skipping the IP6 dispatch
- The IP6 transmission interface notices the different type of message, which always warrants a direct transmission.
- The MAC layer schedules the transmission
- The IP6 transmission interface fills in the frame
- The MAC dest is set to the parent of this node and the MAC src is set to be the same length as the address of the parent
- The payload is filled up to contain the Data Request MAC command
- The MAC security level and key ID mode is also fixed for MAC commands under the Thread specification
- The MAC layer secures the frame and sends it out
We could imagine giving the data poll manager direct access as a client of the MAC layer to avoid having to shuffle data through the IP6 transmission interface. This is only justified because MAC command frames are never 6LoWPAN-compressed or fragmented, nor do they depend on the IP6 interface in any way.
Control plane: Child supervision
This type of message behaves similarly to the MAC data polls. The message is essentially and empty MAC frame, but OpenThread chooses to also route it through the IP6 transmission interface. It would be far better to allow a child supervision implementation to be a direct client of the MAC interface.
Control plane: Joiner entrust and MLE announce
These two message types are also explicitly marked, because they require a specific Key ID Mode to be selected when producing the frame for the MAC interface.
Caveat about MAC layer security
So far, it seems like we can expect the MAC layer to have no cross-layer dependencies: it receives frames with a completely specified description of how they are to be secured and transmitted, and just does so. However, this is not entirely the case.
When the frame is being secured, the key ID mode has been set by the upper layers as described above, and this key ID mode is used to select between a few different key disciplines. For example, mode 0 is only used by Joiner entrust messages and uses the Thread KEK sequence. Mode 1 uses the MAC key sequence and Mode 2 is a constant key used only in MLE announce messages. Hence, this key ID mode selection is actually enabling an upper layer to determine the specific key being used in the link layer.
Note that we cannot just reduce this dependency by allowing the upper layer to specify the key used in MAC encryption. During frame reception, the MAC layer itself has to know which key to use in order to decrypt the frames correctly.
Bluetooth Low Energy Design
This document describes the design of the BLE stack in Tock.
System call interface
The system call interface is modeled after the HCI interface defined in the Bluetooth specification.
Device address
The kernel assigns the device address. The process may read the device address
using an allow system call.
Advertising
For advertising, the system call interface allows a process to configure an advertising payload, advertising event type, scan response payload, interval and tx power. Permissible advertising types include:
- Connectable undirected
- Connectable directed
- Non-connectable undirected
- Scannable undirected
The driver is not responsible for validating that the payload for these advertising types follows any particular specification. Advertising event types that require particular interactions at the link-layer with peer devices (e.g. scanning or establishing connections) are not permissible:
- Scan request
- Scan response
- Connect request
Scan response are sent automatically if a scan response payload is configured. Scan request and connection requests are handled by other parts of the system call interface.
To set up an advertisement:
-
Configure the advertisement payload, type, interval, tx power and, optionally, scan response payload.
- Advertisement payload
allow - Advertisement type
command - If the advertising type is scannable, you SHOULD configure a scan response
payload using
allow - Advertisement interval
command - Advertisement tx power
command
- Advertisement payload
-
Start periodic advertising using a
command
Any changes to the configuration while periodic advertising is happening will take effect in a future advertising event. The kernel will use best effort to reconfigure advertising in as few events as possible.
To stop advertising
- Stop periodic advertising a
command
Scanning
Connection-oriented communication
Hardware Interface Layer (HIL)
The Bluetooth Low Energy Radio HIL defines a cross-platform interface for interacting with on-chip BLE radios (i.e. it does not necessarily work for radios on a dedicated IC connected over a bus).
The goal of this interface is to expose low-level details of the radio that are common across platforms, except in cases where abstraction is needed for common cases to meet timing constraints.
#![allow(unused)] fn main() { pub trait BleRadio { /// Sets the channel on which to transmit or receive packets. /// /// Returns Err(ErrorCode::BUSY) if the radio is currently transmitting or /// receiving, otherwise Ok(()). fn set_channel(&self, channel: RadioChannel) -> Result<(), ErrorCode>; /// Sets the transmit power /// /// Returns Err(ErrorCode::BUSY) if the radio is currently transmitting or /// receiving, otherwise Ok(()). fn set_tx_power(&self, power: u8) -> Result<(), ErrorCode>; /// Transmits a packet over the radio /// /// Returns Err(ErrorCode::BUSY) if the radio is currently transmitting or /// receiving, otherwise Ok(()). fn transmit_packet( &self, buf: &'static mut [u8], disable: bool) -> Result<(), ErrorCode>; /// Receives a packet of at most `buf.len()` size /// /// Returns Err(ErrorCode::BUSY) if the radio is currently transmitting or /// receiving, otherwise Ok(()). fn receive_packet(&self, buf: &'static mut [u8]) -> Result<(), ErrorCode>; // Aborts an ongoing transmision // // Returns None if no transmission was ongoing, or the buffer that was // being transmitted. fn abort_tx(&self) -> Option<&'static mut [u8]>; // Aborts an ongoing reception // // Returns None if no transmission was ongoing, or the buffer that was // // being received into. The returned buffer may or may not have some populated // bytes. fn abort_rx(&self) -> Option<&'static mut [u8]>; // Disable periodic advertisements // // Returns always Ok(()) because it does not respect whether // the driver is actively advertising or not fn disable(&self) -> Result<(), ErrorCode>; } pub trait RxClient { fn receive_event(&self, buf: &'static mut [u8], len: u8, result: Result<(), ErrorCode>); } pub trait TxClient { fn transmit_event(&self, buf: &'static mut [u8], result: Result<(), ErrorCode>); } pub enum RadioChannel { DataChannel0 = 4, DataChannel1 = 6, DataChannel2 = 8, DataChannel3 = 10, DataChannel4 = 12, DataChannel5 = 14, DataChannel6 = 16, DataChannel7 = 18, DataChannel8 = 20, DataChannel9 = 22, DataChannel10 = 24, DataChannel11 = 28, DataChannel12 = 30, DataChannel13 = 32, DataChannel14 = 34, DataChannel15 = 36, DataChannel16 = 38, DataChannel17 = 40, DataChannel18 = 42, DataChannel19 = 44, DataChannel20 = 46, DataChannel21 = 48, DataChannel22 = 50, DataChannel23 = 52, DataChannel24 = 54, DataChannel25 = 56, DataChannel26 = 58, DataChannel27 = 60, DataChannel28 = 62, DataChannel29 = 64, DataChannel30 = 66, DataChannel31 = 68, DataChannel32 = 70, DataChannel33 = 72, DataChannel34 = 74, DataChannel35 = 76, DataChannel36 = 78, AdvertisingChannel37 = 2, AdvertisingChannel38 = 26, AdvertisingChannel39 = 80, } }
TicKV Key-Value Store
TicKV is a flash-optimized key-value store written in Rust. Tock supports using TicKV within the OS to enable the kernel and processes to store and retrieve key-value objects in local flash memory.
TicKV and Key-Value Design
This section provides a quick overview of the TicKV and Key-Value stack in Tock.
TicKV Structure and Format
TicKV can store 8 byte keys and values up to 2037 bytes. TicKV is page-based, meaning that each object is stored entirely on a single page in flash.
Note: for familiarity, we use the term "page", but in actuality TicKV uses the size of the smallest erasable region, not necessarily the actual size of a page in the flash memory.
Each object is assigned to a page based on the lowest 16 bits of the key:
object_page_index = (key & 0xFFFF) % <number of pages>
Each object in TicKV has the following structure:
0 3 11 (bytes)
---------------------------------- ... -
| Header | Key | Value |
---------------------------------- ... -
The header has this structure:
0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 (bits)
-------------------------------------------------
| Version=1 |V| res | Length |
-------------------------------------------------
Version: Format of the object, currently this is always 1.Valid (V): 1 if this object is valid, 0 otherwise. This is set to 0 to delete an object.Length (Len): The total length of the object, including the length of the header (3 bytes), key (8 bytes), and value.
Subsequent keys either start at the first byte of a page or immediately after
another object. If a key cannot fit on the page assigned by the
object_page_index, it is stored on the next page with sufficient room.
Objects are updated in TicKV by invalidating the existing object (setting the
V flag to 0) and then writing the new value as a new object. This removes the
need to erase and re-write an entire page of flash to update a specific value.
TicKV on Tock Format
The previous section describes the generic format of TicKV. Tock builds upon this format by adding a header to the value buffer to add additional features.
The full object format for TicKV objects in Tock has the following structure:
0 3 11 12 16 20 (bytes)
------------------------------------------------ ... ----
| TicKV | Key |Ver| Length | Write | Value |
| Header | | | | ID | |
------------------------------------------------ ... ----
<--TicKV Header+Key--><--Tock TicKV Header+Value-...---->
Version (Ver): One byte version of the Tock header. Currently 0.Length: Four byte length of the value.Write ID: Four byte identifier for restricting access to this object.
The central addition is the Write ID, which is a u32 indicating the
identifier of the writer that added the key-value object. The write ID of 0 is
reserved for the kernel to use. Each process can be assigned using TBF headers
its own write ID to use for storing state, such as in a TicKV database. Each
process and the kernel can then be granted specific read and update permissions,
based on the stored write ID. If a process has read permissions for the specific
ID stored in the Write ID field, then it can access that key-value object. If
a process has update permissions for the specific ID stored in the Write ID
field, then it can change the value of that key-value object.
Tock Key-Value APIs
Tock supports two key-value orientated APIs: one that uses key-value objects directly and one that requires permissions.
The base interface looks like this. Note, this version is simplified for illustration, the actual version is complete Rust.
#![allow(unused)] fn main() { pub trait KV { /// Retrieve a value from the store. fn get(&self, key: [u8], value: [u8]) -> Result<(), ([u8], [u8], ErrorCode)>; /// Insert a key-value object into the store. Overwrite if needed. fn set(&self, key: [u8], value: [u8]) -> Result<(), ([u8], [u8], ErrorCode)>; /// Insert a key-value object into the store if it doesn't exist. fn add(&self, key: [u8], value: [u8]) -> Result<(), ([u8], [u8], ErrorCode)>; /// Modify a key-value object into the store if it already exists. fn update(&self, key: [u8], value: [u8]) -> Result<(), ([u8], [u8], ErrorCode)>; /// Remove a key-value object from the store. fn delete(&self, key: [u8]) -> Result<(), ([u8], ErrorCode)>; } }
(You can find the full definition in tock/kernel/src/hil/kv.rs.)
To enable access control, we layer an additional KV interface on top of the KV
interface.
#![allow(unused)] fn main() { pub trait KVPermissions { /// Retrieve a value from the store. fn get(&self, key: [u8], value: [u8], permissions: Perm) -> Result<(), ([u8], [u8], ErrorCode)>; /// Insert a key-value object into the store. Overwrite if needed. fn set(&self, key: [u8], value: [u8], permissions: Perm) -> Result<(), ([u8], [u8], ErrorCode)>; /// Insert a key-value object into the store if it doesn't exist. fn add(&self, key: [u8], value: [u8], permissions: Perm) -> Result<(), ([u8], [u8], ErrorCode)>; /// Modify a key-value object into the store if it already exists. fn update(&self, key: [u8], value: [u8], permissions: Perm) -> Result<(), ([u8], [u8], ErrorCode)>; /// Remove a key-value object from the store. fn delete(&self, key: [u8], permissions: Perm) -> Result<(), ([u8], ErrorCode)>; } }
As you can see, each of these APIs requires a permission so the capsule can verify that the requestor has access to the given K-V object. We use the TicKV on Tock storage format to store permissions to verify later queries.
Key-Value Stack in Tock
The KV stack is structured as the following:
+============================================================+
|| Userspace ||
+============================================================+
----------------------Syscall Interface-----------------------
+------------------------------------------------------------+
| KV Driver (capsules/kv_driver.rs) |
+------------------------------------------------------------+
hil::kv::KVPermissions
+------------------------------------------------------------+
| Virtualizer (capsules/virtual_kv.rs) |
+------------------------------------------------------------+
hil::kv::KVPermissions
+------------------------------------------------------------+
| K-V store Permissions (capsules/kv_store_permissions.rs) |
+------------------------------------------------------------+
hil::kv::KV
+------------------------------------------------------------+
| TickVKVStore (capsules/tickv_kv_store.rs) |
+------------------------------------------------------------+
capsules::tickv::KVSystem
+------------------------------------------------------------+
| TicKV (capsules/tickv.rs) |
+------------------------------------------------------------+
| |
hil::flash |
+-----------------+
| libraries/tickv |
+-----------------+
Key-Value in Userspace
Userspace applications have access to the K-V store via the kv_driver.rs
capsule. This capsule provides an interface for applications to use the upper
layer get-set-add-update-delete API.
However, applications need permission to use persistent storage. This is granted via headers in the TBF header for the application.
Applications have three fields for permissions: a write ID, multiple read IDs, and multiple modify IDs.
write_id: u32: This u32 specifies the ID used when the application creates a new K-V object. If this is 0, then the application does not have write access. (Awrite_idof 0 is reserved for the kernel.)read_ids: [u32]: These read IDs specify which k-v objects the application can callget()on. If this is empty or does not include the application'swrite_id, then the application will not be able to retrieve its own objects.modify_ids: [u32]: These modify IDs specify which k-v objects the application can edit, either by replacing or deleting. Again, if this is empty or does not include the application'swrite_id, then the application will not be able to update or delete its own objects.
These headers can be added at compilation time with elf2tab or after the TAB
has been created using Tockloader.
To have elf2tab add the header, it needs to be run with additional flags:
elf2tab ... --write_id 10 --read_ids 10,11,12 --access_ids 10,11,12 <list of ELFs>
To add it with tockloader (run in the app directory):
tockloader tbf tlv add persistent_acl 10 10,11,12 10,11,12
Using K-V Storage
To use the K-V storage, load the kv-interactive app:
cd libtock-c/examples/tests/kv_interactive
make
tockloader tbf tlv add persistent_acl 10 10,11,12 10,11,12
tockloader install
Now via the terminal, you can create and view k-v objects by typing set,
get, or delete.
$ tockloader listen
set mykey hello
Setting mykey=hello
Set key-value
get mykey
Getting mykey
Got value: hello
delete mykey
Deleting mykey
Managing TicKV Database on your Host Computer
You can interact with a board's k-v store via tockloader on your host computer.
View the Contents
To view the entire DB:
tockloader tickv dump
Which should give something like:
[INFO ] Using jlink channel to communicate with the board.
[INFO ] Using settings from KNOWN_BOARDS["nrf52dk"]
[STATUS ] Dumping entire TicKV database...
[INFO ] Using settings from KNOWN_BOARDS["nrf52dk"]
[INFO ] Dumping entire contents of Tock-style TicKV database.
REGION 0
TicKV Object hash=0xbbba2623865c92c0 version=1 flags=8 length=24 valid=True checksum=0xe83988e0
Value: 00000000000b000000
TockTicKV Object version=0 write_id=11 length=0
Value:
REGION 1
TicKV Object hash=0x57b15d172140dec1 version=1 flags=8 length=28 valid=True checksum=0x32542292
Value: 00040000000700000038313931
TockTicKV Object version=0 write_id=7 length=4
Value: 38313931
REGION 2
TicKV Object hash=0x71a99997e4830ae2 version=1 flags=8 length=28 valid=True checksum=0xbdc01378
Value: 000400000000000000000000ca
TockTicKV Object version=0 write_id=0 length=4
Value: 000000ca
REGION 3
TicKV Object hash=0x3df8e4a919ddb323 version=1 flags=8 length=30 valid=True checksum=0x70121c6a
Value: 0006000000070000006b6579313233
TockTicKV Object version=0 write_id=7 length=6
Value: 6b6579313233
REGION 4
TicKV Object hash=0x7bc9f7ff4f76f244 version=1 flags=8 length=15 valid=True checksum=0x1d7432bb
Value:
TicKV Object hash=0x9efe426e86d82864 version=1 flags=8 length=79 valid=True checksum=0xd2ac393f
Value: 001000000000000000a2a4a6a6a8aaacaec2c4c6c6c8caccce000000000000000000000000000000000000000000000000000000000000000000000000000000
TockTicKV Object version=0 write_id=0 length=16
Value: a2a4a6a6a8aaacaec2c4c6c6c8caccce
REGION 5
TicKV Object hash=0xa64cf33980ee8805 version=1 flags=8 length=29 valid=True checksum=0xa472da90
Value: 0005000000070000006d796b6579
TockTicKV Object version=0 write_id=7 length=5
Value: 6d796b6579
REGION 6
TicKV Object hash=0xf17b4d392287c6e6 version=1 flags=8 length=79 valid=True checksum=0x854d8de0
Value: 00030000000700000033343500000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000
TockTicKV Object version=0 write_id=7 length=3
Value: 333435
...
[INFO ] Finished in 3.468 seconds
You can see all of the hashed keys and stored values, as well as their headers.
Add a Key-Value Object
You can add a k-v object using tockloader:
tockloader tickv append newkey newvalue
Note that by default tockloader uses a write_id of 0, so that k-v object will
only be accessible to the kernel. To specify a specific write_id so an app can
access it:
tockloader tickv append appkey appvalue --write-id 10
Tock Reference Documents
Tock Reference Documents (TRDs) are formal specifications of various APIs and systems within Tock.
TRDs:
- TRD1: TRDs
- TRD3: HIL Design
- TRD4: Legal
- TRD102: ADC
- TRD103: GPIO
- TRD104: Syscalls
- TRD105: Time
- TRD106: Completion Codes
- Drafts
Tock Reference Document (TRD) Structure and Keywords
TRD: 1
Working Group: Kernel
Type: Best Common Practice
Status: Final
Authors: Philip Levis, Daniel Griffin
Abstract
This document describes the structure followed by all Tock Reference Documents (TRDs), and defines the meaning of several key words in those documents.
1 Introduction
To simplify management, reading, and tracking development, all Tock Reference Documents (TRDs) MUST have a particular structure. Additionally, to simplify development and improve implementation interoperability, all TRDs MUST observe the meaning of several key words that specify levels of compliance. This document describes and follows both.
2 Keywords
The key words "MUST", "MUST NOT", "REQUIRED", "SHALL", "SHALL NOT", "SHOULD", "SHOULD NOT", "RECOMMENDED", "MAY", and "OPTIONAL" in this document are to be interpreted as described in TRD1.
Note that the force of these words is modified by the requirement level of the document in which they are used. These words hold their special meanings only when capitalized, and documents SHOULD avoid using these words uncapitalized in order to minimize confusion.
2.1 MUST
MUST: This word, or the terms "REQUIRED" or "SHALL", mean that the definition is an absolute requirement of the document.
2.2 MUST NOT
MUST NOT: This phrase, or the phrase "SHALL NOT", mean that the definition is an absolute prohibition of the document.
2.3 SHOULD
SHOULD: This word, or the adjective "RECOMMENDED", mean that there may exist valid reasons in particular circumstances to ignore a particular item, but the full implications must be understood and carefully weighed before choosing a different course.
2.4 SHOULD NOT
SHOULD NOT: This phrase, or the phrase "NOT RECOMMENDED" mean that there may exist valid reasons in particular circumstances when the particular behavior is acceptable or even useful, but the full implications should be understood and the case carefully weighed before implementing any behavior described with this label.
2.5 MAY
MAY: This word, or the adjective "OPTIONAL", mean that an item is truly optional. One implementer may choose to include the item because a particular application requires it or because the implementer feels that it enhances the system while another implementer may omit the same item. An implementation which does not include a particular option MUST be prepared to interoperate with another implementation which does include the option, though perhaps with reduced functionality. Similarly, an implementation which does include a particular option MUST be prepared to interoperate with another implementation which does not include the option (except, of course, for the feature the option provides.)
2.6 Guidance in the use of these Imperatives
Imperatives of the type defined in this memo must be used with care and sparingly. In particular, they MUST only be used where it is actually required for interoperation or to limit behavior which has potential for causing harm (e.g., limiting retransmissions) For example, they must not be used to try to impose a particular method on implementors where the method is not required for interoperability.
3 TRD Structure
A TRD MUST begin with a title, and then follow with a header and a body. The header states document metadata, for management and status. The body contains the content of the proposal.
All TRDs MUST conform to Markdown syntax to enable translation to HTML and LaTeX, and for useful display in web tools.
3.1 TRD Header
The TRD header has several fields which MUST be included, as well as others which MAY be included. The TRD header MUST NOT include fields which are not specified in TRD 1 or supplementary Best Common Practice TRDs. The first five header fields MUST be included in all TRDs, in the order stated below. The Markdown syntax to use when composing a header is modeled by this document's header.
The first field is "TRD," and specifies the TRD number of the document. A TRD's number is unique. This document is TRD 1. The TRD type (discussed below) determines TRD number assignment. Generally, when a document is ready to be a TRD, it is assigned the smallest available number. BCP TRDs start at 1 and all other TRDs (Documentary, Experimental, and Informational) start at 101.
The second field, "Working Group," states the name of the working group that produced the document. This document was produced by the Kernel Working Group.
The third field is "Type," and specifies the type of TRD the document is. There are four types of TRD: Best Current Practice (BCP), Documentary, Informational, and Experimental. This document's type is Best Current Practice.
Best Current Practice is the closest thing TRDs have to a standard: it represents conclusions from significant experience and work by its authors. Developers desiring to add code (or TRDs) to Tock SHOULD follow all current BCPs.
Documentary TRDs describe a system or protocol that exists; a documentary TRD MUST reference an implementation that a reader can easily obtain. Documentary TRDs simplify interoperability when needed, and document Tock implementations.
Informational TRDs provide information that is of interest to the community. Informational TRDs include data gathered on radio behavior, hardware characteristics, other aspects of Tock software/hardware, organizational and logistic information, or experiences which could help the community achieve its goals.
Experimental TRDs describe a completely experimental approach to a problem, which are outside the Tock release stream and will not necessarily become part of it. Unlike Documentary TRDs, Experimental TRDs may describe systems that do not have a reference implementation.
The fourth field is "Status," which specifies the status of the TRD. A TRD's status can be either "Draft," which means it is a work in progress, or "Final," which means it is complete and will not change. Once a TRD has the status "Final," the only change allowed is the addition of an "Obsoleted By" field.
The "Obsoletes" field is a backward pointer to an earlier TRD which the current TRD renders obsolete. An Obsoletes field MAY have multiple TRDs listed. For example, if TRD 121 were to replace TRDs 111 and 116, it would have the field "Obsoletes: 111, 116".
The "Obsoleted By" field is added to a Final TRD when another TRD has rendered it obsolete. The field contains the number of the obsoleting TRD. For example, if TRD 111 were obsoleted by TRD 121, it would have the field "Obsoleted By: 121".
"Obsoletes" and "Obsoleted By" fields MUST agree. For a TRD to list another TRD in its Obsoletes field, then that TRD MUST list it in the Obsoleted By field.
The obsoletion fields are used to keep track of evolutions and modifications of a single abstraction. They are not intended to force a single approach or mechanism over alternative possibilities.
The final required field is "Authors," which states the names of the authors of the document. Full contact information should not be listed here (see Section 3.2).
There is an optional field, "Extends." The "Extends" field refers to another TRD. The purpose of this field is to denote when a TRD represents an addition to an existing TRD. Meeting the requirements of a TRD with an Extends field requires also meeting the requirements of all TRDs listed in the Extends field.
If a TRD is a Draft, then four additional fields MUST be included: Draft-Created, Draft-Modified, Draft-Version, and Draft-Discuss. Draft-Created states the date the document was created, Draft-Modified states when it was last modified. Draft-Version specifies the version of the draft, which MUST increase every time a modification is made. Draft-Discuss specifies the email address of a mailing list where the draft is being discussed. Final and Obsolete TRDs MUST NOT have these fields, which are for Drafts only.
3.2 TRD Body
A TRD body SHOULD begin with an Abstract, which gives a brief overview of the content of the TRD. A longer TRD MAY, after the Abstract, have a Table of Contents. After the Abstract and Table of Contents there SHOULD be an Introduction, stating the problem the TRD seeks to solve and providing needed background information.
If a TRD is Documentary, it MUST have a section entitled "Implementation," which instructs the reader how to obtain the implementation documented.
If a TRD is Best Current Practice, it MUST have a section entitled "Reference," which points the reader to one or more reference uses of the practices.
The last three sections of a TRD are author information, citations, and appendices. A TRD MUST have an author information section titled entitled "Author's Address" or "Authors' Addresses." A TRD MAY have a citation section entitled "Citations." A citations section MUST immediately follow the author information section. A TRD MAY have appendices. Appendices MUST immediately follow the citations section, or if there is no citations section, the author information section. Appendices are lettered. Please refer to Appendix A for details.
4 File names
TRDs MUST be stored in the Tock repository with a file name of
trd[number]-[desc].md
Where number is the TRD number and desc is a short, one word description. The name of this document is trd1-trds.md.
5 Reference
The reference use of this document is TRD 1 (itself).
6 Acknowledgments
The definitions of the compliance terms are a direct copy of definitions taken from IETF RFC 2119. This document is heavily copied from TinyOS Enhancement Proposal 1 (TEP 1).
7 Author's Address
Philip Levis
409 Gates Hall
Stanford University
Stanford, CA 94305
phone - +1 650 725 9046
email - pal@cs.stanford.edu
Appendix A Example Appendix
This is an example appendix. Appendices begin with the letter A.
Design of Kernel Hardware Interface Layers (HILs)
TRD: 3
Working Group: Kernel
Type: Best Current Practice
Status: Final
Obsoletes: 2
Author: Brad Campbell, Philip Levis, Hudson Ayers
Abstract
This document describes design rules of hardware interface layers (HILs) in the Tock operating system. HILs are Rust traits that provide a standard interface to a hardware resource, such as a sensor, a flash chip, a cryptographic accelerator, a bus, or a radio. Developers adding new HILs to Tock should read this document and verify they have followed these guidelines.
Introduction
In Tock, a hardware interface layer (HIL) is a collection of Rust traits and types that provide a standardized API to a hardware resource such as a sensor, flash chip, cryptographic accelerator, bus, or a radio.
Capsules use HILs to implement their functionality. For example, a
system call driver capsule that gives processes access to a
temperature sensor relies on having a reference to an implementation
of the kernel::hil::sensors::TemperatureDriver trait. This allows
the system call driver capsule to work on top of any implementation of
the TemperatureDriver trait, whether it is a local, on-chip sensor,
an analog sensor connected to an ADC, or a digital sensor over a bus.
Capsules use HILs in many different ways. They can be directly accessed by kernel services, such as the in-kernel process console using the UART HIL. They can be exposed to processes with system driver capsules, such as with GPIO. They can be virtualized to allow multiple clients to share a single resource, such as with the virtual timer capsule.
This variety of use cases places a complex set of requirements on how a HIL must behave. For example, Tock expects that every HIL is virtualizable: it is possible to take one instance of the trait and allow multiple clients to use it simultaneously, such that each one thinks it has its own, independent instance of the trait. Because virtualization often means requests can be queued and the Tock kernel has a single stack, all HILs must be nonblocking and so have a callback for completion. This has implications to buffer management and ownership.
This document describes these requirements and describes a set of design rules for HILs. They are:
- Don't make synchronous callbacks.
- Split-phase operations return a synchronous
Resulttype which includes an error code in itsErrvalue. - For split-phase operations,
Okmeans a callback will occur whileErrwith an error code besides BUSY means one won't. - Error results of split-phase operations with a buffer parameter include a reference to passed buffer. This returns the buffer to the caller.
- Split-phase operations with a buffer parameter take a mutable reference even if their access is read-only.
- Split-phase completion callbacks include a
Resultparameter whoseErrcontains an error code; these errors are a superset of the synchronous errors. - Split-phase completion callbacks for an operation with a buffer parameter return the buffer.
- Use fine-grained traits that separate out different use cases.
- Separate control and datapath operations into separate traits.
- Blocking APIs are not general: use them sparingly, if at all.
initialize()methods, when needed, should be in a separate trait and invoked in an instantiating Component.- Traits that can trigger callbacks should have a
set_clientmethod. - Use generic lifetimes where possible, except for buffers used in
split-phase operations, which should be
'static.
The rest of this document describes each of these rules and their reasoning.
While these are design rules, they are not sacrosanct. There are reasons or edge cases why a particular HIL might need to break one (or more) of them. In such cases, be sure to understand the reasoning behind the rule; if those considerations don't apply in your use case, then it might be acceptable to break it. But it's important to realize the exception is true for all implementations of the HIL, not just yours; a HIL is intended to be a general, reusable API, not a specific implementation.
The key recurring point in these guidelines is that a HIL should encapsulate a wide range of possible implementations and use cases. It might be that the hardware you are using or designing a HIL for has particular properties or behavior. That does not mean all hardware does. For example, a software pseudo-random generator can synchronously return random numbers. However, a hardware-based one typically cannot (without blocking). If you write a blocking random number HIL because you are working with a software one, you are precluding hardware implementations from using your HIL. This means that a developer must decide to use either the blocking HIL (which in some cases can't exist) or the non-blocking one, making software less reusable.
Rule 1: Don't Make Synchronous Callbacks
Consider the following API for requesting 32 bits of randomness:
#![allow(unused)] fn main() { trait Random { fn random(&self) -> Result<(), ErrorCode>; fn set_client(&self, client: &'static Client); } trait Client { fn random_ready(&self, result: Result<u32, ErrorCode>); } }
If Random is implemented on top of a hardware random number
generator, the random bits might not be ready until an interrupt
is issued. E.g., if the implementation generates random numbers
by running AES128 in counter mode on a hidden seed[HCG], then
generating random bits may require an interrupt.
But AES128 computes 4 32-bit values of randomness. So a smart
implementation will compute 128 bits, and call back with 32 of them.
The next 3 calls to random can produce data from the remaining
data. The simple implementation for this algorithm is to call random_ready
inside the call to random if cached results are ready: the values
are ready, so issue the callback immediately.
Making the random_ready callback from inside random is a bad idea for
two reasons: call loops and client code complexity.
The first issue that arises is it can create call loops. Suppose that
the client wants 1024 bits (so 32 words) or randomness. It needs to
invoke random 32 times. The standard call pattern is to call random,
then in the random_ready callback, store the new random bits and call
random again. This repeats 32 times.
If the implementation uses an interrupt every 4 calls, then this call pattern isn't terrible: it would result in 8 stack frames. But suppose that the implementation chooses to generate not 128 bits at a time, but rather 1024 bits (e.g., runs counter mode on 32 words). Then one could have up to 64 stack frames. It might be that the compiler inlines this, but it also might not. Assuming the compiler always does a specific optimization for you is dangerous: there all sorts of edge cases and heuristics, and trying to adjust source code to coax it to do what you want (which can change with each compiler release) is brittle.
The second, and more dangerously, client logic becomes much more complex. For example, consider this client code:
#![allow(unused)] fn main() { ... if self.state.get() == State::Idle { let result = random.random(); match result { Ok(()) => self.state.set(State::Waiting), Err(e) => self.state.set(State::Error), } } ... fn random_ready(&self, bits: u32, result: Result<(), ErrorCode>) { match result { Ok(()) => { // Use the random bits self.state.set(State::Idle); } Err(e) => { self.state.set(State::Error); } } } }
The result of starting a split-phase call indicates whether
there will be a callback: Ok means there will be a callback, while
Err means there will not. If the implementation of Random issues
a synchronous callback, then the state variable of the client will be
in an incorrect state. Before the call to random returns, the callback
executes and sets state to State::Idle. Then, the call to random
returns, and sets state to State::Waiting. If the callback checks
whether it's in the Waiting state (e.g., to guard against spurious/buggy
callbacks), this check will fail. The problem is that the callback occurs
before the caller even knows that it will occur.
There are ways to guard against this. The caller can optimistically assume
that random will succeed:
#![allow(unused)] fn main() { ... if self.state.get() == State::Idle { self.state.set(State::Waiting); let result = random.random(); match result { Err(e) => self.state.set(State::Error), Ok(()) => {} // Do nothing } } ... fn random_ready(&self, bits: u32, result: Result<(), ErrorCode>) { match result { Ok(()) => { // Use the random bits self.state.set(State::Idle); } Err(e) => { self.state.set(State::Error); } } } }
After the first match (where random is called), self.state can be in
3 states:
State::Waiting, if the call succeeded but the callback is asynchronous.State::Error, if the call or callback failed.State::Idle, if it received a synchronous callback.
This progresses up the call stack. The client that invoked this module might
receive a callback invoked from within the random_ready callback.
Expert programmers who are fully prepared for a re-entrant callback might realize this and program accordingly, but most programmers aren't. Some of the Tock developers who have been writing event-driven embedded for code decades have mistakenly handled this case. Having synchronous callbacks makes all code need to be as carefully written as interrupt handling code, since from the caller's standpoint the callback can preempt execution.
Issuing an asynchronous callback requires that the module be invoked
again later: it needs to return now, and then after that call stack is
popped, invoke the callback. For callbacks that will be triggered by
interrupts, this occurs naturally. However, if, such as in the random
number generation example, the callback is purely from software, the
module needs a way to make itself be invoked later, but as quickly as
possible. The standard mechanism to achieve this in Tock is through
deferred procedure calls. This mechanism allows a module to tell the
Tock scheduler to call again later, from the main scheduling loop. For
example, a caching implementation of Random might look like this:
#![allow(unused)] fn main() { impl Random for CachingRNG { fn random(&self) -> Result<(), ErrorCode> { if self.busy.get() { return Err(ErrorCode::BUSY); } self.busy.set(true); if self.cached_words.get() > 0 { // This tells the scheduler to issue a deferred procedure call, self.deferred_call.set(); } else { self.request_more_randomness(); } } ... } impl<'a> DeferredCallClient for CachingRNG<'a> { fn handle_deferred_call(&self) { let rbits = self.pop_cached_word(); self.client.random_ready(rbits, Ok(())); } // This function must be called during board initialization. fn register(&'static self) { self.deferred_call.register(self); } } }
Rule 2: Return Synchronous Errors
Methods that invoke hardware can fail. It could be that the hardware is not
configured as expected, it is powered down, or it has been disabled. Generally
speaking, every HIL operation should return a Rust Result type, whose Err
variant includes an error code. The Tock kernel provides a standard set of
error codes, oriented towards system calls, in the kernel::ErrorCode enum.
HILs SHOULD return ErrorCode. Sometimes, however, these error codes don't
quite fit the use case and so in those cases a HIL may defines its own error
codes. The I2C HIL, for example, defines an i2c::Error enumeration for cases
such as address and data negative acknowledgments, which can occur in I2C.
In cases when a HIL returns its own error code type, this error code type
should also be able to represent all of the errors returned in a callback
(see Rule 6 below).
If a method doesn't return a synchronous error, there is no way for a caller to know if the operation succeeded. This is especially problematic for split-phase calls: whether the operation succeeds indicates whether there will be a callback.
Rule 3: Split-phase Result Values Indicate Whether a Callback Will Occur
Suppose you have a split-phase call, such as for a SPI read/write operation:
#![allow(unused)] fn main() { pub trait SpiMasterClient { /// Called when a read/write operation finishes fn read_write_done( &self, write_buffer: &'static mut [u8], read_buffer: Option<&'static mut [u8]>, len: usize, ); } pub trait SpiMaster { fn read_write_bytes( &self, write_buffer: &'static mut [u8], read_buffer: Option<&'static mut [u8]>, len: usize, ) -> Result<(), ErrorCode>; } }
One issue that arises is whether a client calling
SpiMaster::read_write_bytes should expect a callback invocation of
SpiMasterClient::read_write_done. Often, when writing event-driven
code, modules are state machines. If the client is waiting for an
operation to complete, then it shouldn't call read_write_bytes
again. Similarly, if it calls read_write_bytes and the operation
doesn't start (so there won't be a callback), then it can try to call
read_write_bytes again later.
It's very important to a caller to know whether a callback will be issued. If there will be a callback, then it knows that it will be invoked again: it can use this invocation to dequeue a request, issue its own callbacks, or perform other operations. If there won't be a callback, then it might never be invoked again, and can be in a stuck state.
For this reason, the standard calling convention in Tock is that an
Ok result means there will be a callback in response to this call,
and an Err result means there will not be a callback in response to
this call. Note that it is possible for an Err result to be
returned yet there will be a callback in the future. This depends on
which ErrorCode is passed. A common calling pattern is for a trait
to return ErrorCode::BUSY if there is already an operation pending
and a callback will be issued. This error code is unique in this way:
the general rule is that Ok means there will be a callback in
response to this call, Err with ErrorCode::BUSY means this call
did not start a new operation but there will be a callback in response
to a prior call, and any other Err means there will not be a
callback.
Cancellation calls are a slight variation on this approach. A call to
a cancel method (such as uart::Transmit::transmit_abort) also
returns a Result type, for which an Ok value means there will be a
callback in the future while an Err value means there will not be a
callback. In this way the return type reflects the original call.
The Ok value of a cancel method, however, needs to distinguish between
two cases:
- There was an outstanding operation, so there will be a callback, but it was not cancelled.
- There was an outstanding operation, so there will be a callback, and it was cancelled.
The Result::Ok type for cancel calls therefore often contains
information that signals whether the operation was successfully
cancelled.
Rule 4: Return Passed Buffers in Error Results
Consider this method:
#![allow(unused)] fn main() { // Anti-pattern: caller cannot regain buf on an error fn send(&self, buf: &'static mut [u8]) -> Result<(), ErrorCode>; }
This method is for a split-phase call: there is a corresponding completion callback that passes the buffer back:
#![allow(unused)] fn main() { fn send_done(&self, buf: &'static mut[u8]); }
The send method follows Rule 2: it returns a synchronous error. But
suppose that calling it returns an Err(ErrorCode): what happens to
the buffer?
Rust's ownership rules mean that the caller can't still hold the
reference: it passed the reference to the implementer of send. But
since the operation did not succeed, the caller does not expect a
callback. Forcing the callee to issue a callback on a failed operation
typically forces it to include an alarm or other timer. Following Rule
1 means it can't do so synchronously, so it needs an asynchronous
event to invoke the callback from. This leads to every implementer of
the HIL requiring an alarm or timer, which use RAM, has more complex
logic, and makes initialization more complex.
As a result, in the above interface, if there is an error on send,
the buffer is lost. It's passed into the callee, but the callee has no
way to pass it back.
If a split-phase operation takes a reference to a buffer as a
parameter, it should return a reference to a buffer in the Err case:
#![allow(unused)] fn main() { fn send(&self, buf: &'static mut [u8]) -> Result<(), (ErrorCode, &'static mut [u8])>; }
Before Tock transitioned to using Result, this calling pattern was
typically implemented with an Option:
#![allow(unused)] fn main() { fn send(&self, buf: &'static mut [u8]) -> (ReturnCode, Option<&'static mut [u8]>); }
In this approach, when the ReturnCode is SUCCESS, the Option is
always supposed to be None; it the ReturnCode has an error value,
the Option contains the passed buffer. This invariant, however,
cannot be checked. Transitioning to using Result both makes Tock
more in line with standard Rust code and enforces the invariant.
Rule 5: Always Pass a Mutable Reference to Buffers
Suppose you are designing a trait to write some text to an LCD screen. The trait takes a buffer of ASCII characters, which it puts on the LCD:
#![allow(unused)] fn main() { // Anti-pattern: caller is forced to discard mutability trait LcdTextDisplay { // This is an anti-pattern: the `text` buffer should be `mut`, for reasons explained below fn display_text(&self, text: &'static [u8]) -> Result<(), ErrorCode>; fn set_client(&self, client: &'static Client); } trait Client { fn text_displayed(&self, text: &'static [u8], result: Result<(), ErrorCode>); } }
Because the text display only needs to read the provided text, the reference to the buffer is not mutable.
This is a mistake.
The issue that arises is that because the caller passes the reference to the LCD screen, it loses access to it. Suppose that the caller has a mutable reference to a buffer, which it uses to read in data typed from a user before displaying it on the screen. Or, more generally, it has a mutable reference so it can create new text to display to the screen.
#![allow(unused)] fn main() { enum State { Idle, Reading, Writing, } struct TypeToText { buffer: Option<&'static mut [u8]>, uart: &'static dyn uart::Receive<'static>, lcd: &'static dyn LcdTextDisplay, state: Cell<State>, } impl TypeToText { fn display_more(&self) -> Result<(), ErrorCode> { if self.state.get() != State::Idle || self.buffer.is_none() { return Err(ErrorCode::BUSY); } let buffer = self.buffer.take(); let uresult = uart.receive_buffer(buffer, buffer.len()); match uresult { Ok(()) => { self.state.set(State::Reading); return Ok(()); } Err(e) => return Err(e), } } } impl uart::ReceiveClient<'static> for TypeToText { fn received_buffer(&self, buf: &'static mut [u8]) { self.lcd.display_text(buf); // discards mut } } }
The problem is in this last line. TypeToText needs a mutable
reference so it can read into it. But once it passes the reference
to LcdTextDisplay, it discards mutability and cannot get it back:
text_displayed provides an immutable reference, which then cannot
be put back into the buffer field of TypeToText.
For this reason, split phase operations that take references should generally take mutable references, even if they only need read-only access. Because the reference will not be returned back until the callback, the caller cannot rely on the call stack and scoping to retain mutability.
Rule 6: Include a Result in Completion Callbacks That Includes an Error Code in its Err
Any error that can occur synchronously can usually occur asynchronously too.
Therefore, callbacks need to indicate that an error occurred and pass that
back to the caller. Callbacks therefore should include a Result type,
whose Err variant includes an error code. This error code type SHOULD
be the same type that is returned synchronously, to simplify error
processing and returning errors to userspace when needed.
The common case for this is virtualization, where a capsule turns one instance of a trait into a set of instances that can be used by many clients, each with their own callback. A typical virtualizer queues requests. When a request comes in, if the underlying resource is idle, the virtualizer forwards the request and marks itself busy. If the request on the underlying resource returns an error, the virtualizer returns this error to the client immediately and marks itself idle again.
If the underlying resource is busy, then the virtualizer returns an
Ok to the caller and queues the request. Later, when the request is
dequeued, the virtualizer invokes the underlying resource. If this
operation returns an error, then the virtualizer issues a callback to
the client, passing the error. Because virtualizers queue and delay
operations, they also delay errors. If a HIL does not pass a Result
in its callback, then there is no way for the virtualizer inform the
client that the operation failed.
Note that abstractions which can be virtualized concurrently may not
need to pass a Result in their callback. Alarm, for example, can
be virtualized into many alarms. These alarms, however, are not queued
in a way that implies future failure. A call to Alarm::set_alarm
cannot fail, so there is no need to return a Result in the callback.
Rule 7: Always Return the Passed Buffer in a Completion Callback
If a client passes a buffer to a module for an operation, it needs to be able to reclaim it when the operation completes. Rust ownership (and the fact that passed references must be mutable, see Rule 5 above) means that the caller must pass the reference to the HIL implementation. The HIL needs to pass it back.
Rule 8: Use Fine-grained Traits That Separate Different Use Cases
Access to a trait gives access to functionality. If several pieces of functionality are coupled into a single trait, then a client that needs access to only some of them gets all of them. HILs should therefore decompose their abstractions into fine-grained traits that separate different use cases. For clients that need multiple pieces of functionality, the HIL can also define composite traits, such that a single reference can provide multiple traits.
Consider, for example, an early version of the Alarm trait:
#![allow(unused)] fn main() { pub trait Alarm: Time { fn now(&self) -> u32; fn set_alarm(&self, tics: u32); fn get_alarm(&self) -> u32; } }
This trait coupled two operations: setting an alarm for a callback and being able to get the current time. A module that only needs to be able to get the current time (e.g., for a timestamp) must also be able to set an alarm, which implies RAM/state allocation somewhere.
The modern versions of the traits look like this:
#![allow(unused)] fn main() { pub trait Time { type Frequency: Frequency; // The number of ticks per second type Ticks: Ticks; // The width of a time value fn now(&self) -> Self::Ticks; } pub trait Alarm<'a>: Time { fn set_alarm_client(&'a self, client: &'a dyn AlarmClient); fn set_alarm(&self, reference: Self::Ticks, dt: Self::Ticks); fn get_alarm(&self) -> Self::Ticks; fn disarm(&self) -> ReturnCode; fn is_armed(&self) -> bool; fn minimum_dt(&self) -> Self::Ticks; } }
They decouple getting a timestamp (the Time trait) from an alarm
that issues callbacks at a particular timestamp (the Alarm trait).
Separating a HIL into fine-grained traits allows Tock to follow the security principle of least privilege. In the case of GPIO, for example, being able to read a pin does not mean a client should be able to reconfigure or write it. Similarly, for a UART, being able to transmit data does not mean that a client should always also be able to read data, or reconfigure the UART parameters.
Rule 9: Separate Control and Datapath Operations into Separate Traits
This rule is a direct corollary for Rule 8, but has some specific considerations that make it a rather hard and fast rule. Rule 8 (separate HILs into fine-grained traits) has a lot of flexibility in design sensibility in terms of what operations can be coupled together. This rule, however, is more precise and strict.
Many abstractions combine data operations and control operations. For example, a SPI bus has data operations for sending and receiving data, but it also has control operations for setting its speed, polarity, and chip select. An ADC has data operations for sampling a pin, but also has control operations for setting the bit width of a sample, the reference voltage, and the sampling clock used. Finally, a radio has data operations to send and receive packets, but also control operations for setting transmit power, frequencies, and local addresses.
HILs should separate these operations: control and data operations should (almost) never be in the same trait. The major reason is security: allowing a capsule to send packets should not also allow it to set the local node address. The second major reason is virtualization. For example, a UART virtualizer that allows multiple concurrent readers cannot allow them to change the speed or UART configuration, as it is shared among all of them. A capsule that can read a GPIO pin should not always be able to reconfigure the pin (what if other capsules need to be able to read it too?).
For example, returning to the UART example, this is an early version of the UART trait (v1.3):
#![allow(unused)] fn main() { // Anti-pattern: combining data and control operations makes this // trait unvirtualizable, as multiple clients cannot configure a // shared UART. It also requires every client to handle both // receive and transmit callbacks. pub trait UART { fn set_client(&self, client: &'static Client); fn configure(&self, params: UARTParameters) -> ReturnCode; fn transmit(&self, tx_data: &'static mut [u8], tx_len: usize); fn receive(&self, rx_buffer: &'static mut [u8], rx_len: usize); fn abort_receive(&self); } }
It breaks both Rule 8 and Rule 9. It couples reception and
transmission (Rule 8). It also couples configuration with data (Rule
9). This HIL was fine when there was only a single user of the
UART. However, once the UART was virtualized, configure could not
work for virtualized clients. There were two options: have configure
always return an error for virtual clients, or write a new trait for
virtual clients that did not have configure. Neither is a good
solution. The first pushes failures to runtime: a capsule that needs
to adjust the configuration of the UART can be connected to a virtual
UART and compile fine, but then fails when it tries to call
configure. If that occurs rarely, then it might be a long time until
the problem is discovered. The second solution (a new trait) breaks
the idea of virtualization: a client has to be bound to either a
physical UART or a virtual one, and can't be swapped between them even
if it never calls configure.
The modern UART HIL looks like this:
#![allow(unused)] fn main() { pub trait Configure { fn configure(&self, params: Parameters) -> ReturnCode; } pub trait Transmit<'a> { fn set_transmit_client(&self, client: &'a dyn TransmitClient); fn transmit_buffer( &self, tx_buffer: &'static mut [u8], tx_len: usize, ) -> (ReturnCode, Option<&'static mut [u8]>); fn transmit_word(&self, word: u32) -> ReturnCode; fn transmit_abort(&self) -> ReturnCode; } pub trait Receive<'a> { fn set_receive_client(&self, client: &'a dyn ReceiveClient); fn receive_buffer( &self, rx_buffer: &'static mut [u8], rx_len: usize, ) -> (ReturnCode, Option<&'static mut [u8]>); fn receive_word(&self) -> ReturnCode; fn receive_abort(&self) -> ReturnCode; } pub trait Uart<'a>: Configure + Transmit<'a> + Receive<'a> {} pub trait UartData<'a>: Transmit<'a> + Receive<'a> {} }
Rule 10: Avoid Blocking APIs
The Tock kernel is non-blocking: I/O operations are split-phase and have a completion callback. If an operation blocks, it blocks the entire system.
There are cases when operations are synchronous sometimes. The random number generator in Rule 1 is an example. If random bits are cached, then a call to request random bits can sometimes return those bits synchronously. If the random number generator needs to engage the underlying AES engine, then the random bits have to be asynchronous. As Rule 1 goes into, even operations that could be synchronous should have a callback that executes asynchronously.
Having a conditional synchronous operation and an asynchronous backup is a poor solution. While it might seem to make the synchronous cases simpler, a caller still needs to handle the asynchronous ones. The code ends up being more complex and larger/longer, as it is now conditional: a caller has to handle both cases.
The more attractive case is when a particular implementation of a HIL seems like it can always be synchronous, therefore its HIL is synchronous. For example, writes to flash are typically asynchronous: the chip issues an interrupt once the bits are written. However, if the flash chip being written is the same as the one code is fetched from, then the chip may block reads while the write completes. From the perspective of the caller, writing to flash is blocking, as the core stops fetching instructions. A synchronous flash HIL allows implementations to be simpler, straight-line code.
Capsules implemented on a synchronous HIL only work for implementations with synchronous behavior. Such a HIL limits reuse. For example, a storage system built on top of this synchronous API can only work on the same flash bank instructions are stored on: otherwise, the operations will be split-phase.
There are use cases when splitting HILs in this way is worth it. For example, straight-line code can often be shorter and simpler than event-driven systems. By providing a synchronous API for the subset of devices that can support it, one can reduce code size and produce more light-weight implementations. For this reason, the rule is to avoid blocking APIs, not to never implement them. They can and should at times exist, but their uses cases should be narrow and constrained as they are fundamentally not as reusable.
Rule 11: initialize() methods, when needed, should be in a separate trait and invoked in an instantiating Component
Occasionally, HIL implementations need an initialize method to set up
state or configure hardware before their first use. When one-time
initialization is needed, doing it deterministically at boot is preferable
than doing it dynamically on the first operation (e.g., by having a
is_initialized field and calling initialize if it is false, then setting
it true). Doing at boot has two advantages. First, it is fail-fast:
if the HIL cannot initialize, this will be detected immediately at boot
instead of potentially non-deterministically on the first operation. Second,
it makes operations more deterministic in their execution time, which is
useful for precise applications.
Because one-time initializations should only be invoked at boot, they should not be part of standard HIL traits, as those traits are used by clients and services. Instead, they should either be in a separate trait or part of a structure's implementation.
Because forgetting to initialize a module is a common source of errors,
modules that require one-time initialization should, if at all possible,
put this in an instantiable Component for that module. The Component
can handle all of the setup needed for the module, including invoking
the call to initialize.
Rule 12: Traits that can trigger callbacks should have a set_client method
If a HIL trait can trigger callbacks it should include a method for setting the client that handles the callbacks. There are two reasons. First, it is generally important to be able to change callbacks at runtime, e.g., in response to requests, virtualization, or other dynamic runtime behavior. Second, a client that can trigger a callback should also be able to control what method the callback invokes. This gives the client flexibility if it needs to change dispatch based on internal state, or perform some form of proxying. It also allows the client to disable callbacks (by passing an implementation of the trait that does nothing).
Rule 13: Use generic lifetimes, except for buffers in split-phase operations, which should be 'static
HIL implementations should use generic lifetimes whenever possible. This has
two major advantages. First, it leaves open the possibilty that the kernel
might, in the future, support loadable modules which have a finite lifetime.
Second, an explicit `static lifetime brings safety and borrow-checker
limitations, because mutably accessing `static variables is generally
considered unsafe.
If possible, use a single lifetime unless there are compelling reasons or
requirements otherwise. The standard lifetime name in Tock code is `a,
although code can use other ones if they make sense.
In practice today, these `a lifetimes are all bound to `static.
However, by not using `static explicitly these HILs can be used with
arbitrary lifetimes.
Buffers used in split-phase operations are the one exception to generic
lifetimes. In most cases, these buffers will be used by hardware in DMA
or other operations. In that way, their lifetime is not bound to program
execution (i.e., lifetimes or stack frames) in a simple way. For example,
a buffer passed to a DMA engine may be held by the engine indefinitely if
it is never started. For this reason, buffers that touch hardware usually
must be `static. If their lifetime is not `static, then they
must be copied into a static buffer to be used (this is usually what happens
when application AppSlice buffers are passed to hardware). To avoid
unnecessary copies, HILs should use `static lifetimes for buffers
used in split-phase operations.
Author Addresses
Philip Levis
414 Gates Hall
Stanford University
Stanford, CA 94305
email: Philip Levis <pal@cs.stanford.edu>
phone: +1 650 725 9046
Brad Campbell
Computer Science
241 Olsson
P.O. Box 400336
Charlottesville, Virginia 22904
email: Brad Campbell <bradjc@virginia.edu>
Licensing and Copyrights
TRD: 4
Working Group: Core
Type: Best Current Practice
Status: Final
Author: Pat Pannuto
Abstract
This document describes Tock’s policy on licensing and copyright. It explains the rationale behind the license selection (dual-license, MIT or Apache2) and copyright policy (optional, and authors may retain copyright if desired). It further outlines how licensing and copyright shall be handled throughout projects under the Tock umbrella.
Explicitly not discussed in this TRD are issues of trademark, the Tock brand, logos, or other non-code assets and artifacts.
1 Introduction
Tock’s goal is to provide a safe, secure, and efficient operating system for microcontroller-class devices. The Tock project further believes it is important to enable and support widespread adoption of safe, secure, and efficient software. Tock also seeks to be an open and inclusive project, and Tock welcomes contributions from any individuals or entities wishing to improve the safety, security, reliability, efficiency, or usability of Tock and the Tock ecosystem.
The intent of these policies is to best satisfy the needs of all stakeholders in the Tock ecosystem.
2 Licensing
All software artifacts under the umbrella of the Tock project are dual-licensed as Apache License, Version 2.0 (LICENSE-APACHE or http://www.apache.org/licenses/LICENSE-2.0) or MIT license (LICENSE-MIT or http://opensource.org/licenses/MIT).
All contributions to the Tock kernel (the code hosted at https://github.com/tock/tock) MUST be licensed under these terms.
3 Copyright
Entities contributing resources to open-source projects often require attribution to recognize their efforts. Copyright notices are a common means to provide this. For downstream users, the license terms of Tock ensures unencumbered use.
Copyrights in Tock projects are retained by their contributors. No copyright assignment is required to contribute to Tock projects.
Artifacts in the Tock project MAY include explicit copyright notices. Substantial updates to an artifact MAY add additional copyright notices to an artifact. In general, modifications to a file are expected to retain existing copyright notices.
For full authorship information, see the version control history.
4 Implementation
Where possible, all textual files that allow comments MUST include a license notice and copyright notice(s). Files that are not authored by Tock contributors (such as files copied from other projects) are exempt from this policy.
Copyright notices SHOULD include a year. Newer copyright notices SHOULD be placed after existing copyright notices. If non-trivial updates are performed by an original copyright author, they MAY amend the year(s) indicated on their existing copyright statement or MAY add an additional copyright line, at their discretion.
4.1 Format
License and copyright information SHOULD have at least one (1) blank line separating it from any other content in the file.
Text described in this section SHOULD be pre-fixed or post-fixed with technically necessary characters (i.e. to mark as a comment in source code) as appropriate.
The first line of license text SHOULD appear as-follows:
Licensed under the Apache License, Version 2.0 or the MIT License.
The second line of license SHOULD adhere to the SPDX specification for license description. As of this writing, it SHOULD appear as-follows:
SPDX-License-Identifier: Apache-2.0 OR MIT
The current (v2.3) normative rules permit case-insensitive matches of the license identifier but require case-sensitive matching of the disjunction operator. To simplify enforcement of licensing and documentation rules, license information SHOULD preserve case as-shown in the SPDX license list (i.e. as-presented above).
Copyright lines SHOULD follow this pattern:
Copyright {entity} {year}([,year],[-year]).
The {entity} field should reflect the entity wishing to claim copyright. The
{year} field SHOULD reflect when the copyright is first established.
Substantial updates in the future MAY indicate renewed copyright, via additional
comma-separated years or via range syntax, at the copyright holder’s discretion.
The initial year SHALL NOT be removed unless it is the express intent of the
copyright holder to relinquish the initial copyright.
4.1.1 Examples
The common-case format is:
#![allow(unused)] fn main() { // Licensed under the Apache License, Version 2.0 or the MIT License. // SPDX-License-Identifier: Apache-2.0 OR MIT // Copyright Tock Contributors <YYYY>. //! Module-level documentation... }
placed at the top of the file.
If you wish to specifically call out the contribution by you or your company, you may do so by adding another copyright line:
#![allow(unused)] fn main() { // Licensed under the Apache License, Version 2.0 or the MIT License. // SPDX-License-Identifier: Apache-2.0 OR MIT // Copyright Tock Contributors <YYYY>. // Copyright <you/your company> <YYYY>. //! Module-level documentation... }
A file with a long history and multiple copyrights may look as follows:
#!/usr/bin/env bash
# Licensed under the Apache License, Version 2.0 or the MIT License.
# SPDX-License-Identifier: Apache-2.0 OR MIT
# Copyright Tock Contributors 2014.
# Copyright Pat Pannuto 2014,2016-2018,2021.
# Copyright Amit Levy 2016-2019.
# Copyright Bradford James Campbell 2022.
set -e
...
Many additional examples are available throughout the Tock repositories.
4.2 Enforcement
To ensure coverage and compliance with these policies, the Core Team SHALL author and maintain tooling which checks the presence and expected format of license and copyright information. This SHOULD be automated and integrated with continuous integration systems. Contributions which do not satisfy these license and copyright rules MUST NOT be accepted.
In exceptional situations, consensus from the Core Team MAY circumvent this policy. Such situations MUST include public explanation and public record of non-anonymized vote results. This is not expected to ever occur.
5 Author’s Address
Pat Pannuto
3202 EBU3, Mail Code #0404
9500 Gilman Dr
La Jolla, CA 92093, USA
ppannuto@ucsd.edu
Kernel Analog-to-Digital Conversion HIL
TRD: 102
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Philip Levis and Branden Ghena
Draft-Created: Dec 18, 2016
Draft-Modified: June 12, 2017
Draft-Version: 2
Draft-Discuss: devel@lists.tockos.org
Abstract
This document describes the hardware independent layer interface (HIL) for analog-to-digital conversion in the Tock operating system kernel. It describes the Rust traits and other definitions for this service as well as the reasoning behind them. This document also describes an implementation of the ADC HIL for the SAM4L. This document is in full compliance with TRD1.
1 Introduction
Analog-to-digital converters (ADCs) are devices that convert analog input signals to discrete digital output signals, typically voltage to a binary number. While different microcontrollers can have very different control registers and operating modes, the basic high-level interface they provide is very uniform. Software that wishes to use more advanced features can directly use the per-chip implementations, which may export these features.
The ADC HIL is the kernel crate, in module hil::adc. It provides three traits:
- kernel::hil::adc::Adc - provides basic interface for individual analog samples
- kernel::hil::adc::Client - receives individual analog samples from the ADC
- kernel::hil::adc::AdcHighSpeed - provides high speed buffered analog sampling interface
- kernel::hil::adc::HighSpeedClient - receives buffers of analog samples from the ADC
The rest of this document discusses each in turn.
2 Adc trait
The Adc trait is for requesting individual analog to digital conversions, either one-shot or repeatedly. It is implemented by chip drivers to provide ADC functionality. Data is provided through the Client trait. It has four functions and one associated type:
#![allow(unused)] fn main() { /// Simple interface for reading an ADC sample on any channel. pub trait Adc { /// The chip-dependent type of an ADC channel. type Channel; /// Initialize must be called before taking a sample. fn initialize(&self) -> Result<(), ErrorCode>; /// Request a single ADC sample on a particular channel. /// Used for individual samples that have no timing requirements. fn sample(&self, channel: &Self::Channel) -> Result<(), ErrorCode>; /// Request repeated ADC samples on a particular channel. /// Callbacks will occur at the given frequency with low jitter and can be /// set to any frequency supported by the chip implementation. However /// callbacks may be limited based on how quickly the system can service /// individual samples, leading to missed samples at high frequencies. fn sample_continuous(&self, channel: &Self::Channel, frequency: u32) -> Result<(), ErrorCode>; /// Stop a sampling operation. /// Can be used to stop any simple or high-speed sampling operation. No /// further callbacks will occur. fn stop_sampling(&self) -> Result<(), ErrorCode>; fn set_client(&self, client: &'static dyn Client); } }
The initialize function configures the hardware to perform analog sampling.
It MUST be called at least once before any samples are taken. It only needs to
be called once, not once per sample. This function MUST return Ok(()) upon
correct initialization or FAIL if the hardware fails to initialize
successfully. If the driver is already initialized, the function SHOULD return
Ok(()).
The sample function starts a single conversion on the specified ADC channel.
The exact binding of this channel to external or internal analog inputs is
board-dependent. The function MUST return Ok(()) if the analog conversion has
been started, OFF if the ADC is not initialized or enabled, BUSY if a
conversion is already in progress, or INVAL if the specified channel is
invalid. The sample_ready callback of the client MUST be called when the
conversion is complete.
The sample_continuous function begins repeated individual conversions on a
specified channel. Conversions MUST continue at the specified frequency until
stop_sampling is called. The sample_ready callback of the client MUST be
called when each conversion is complete. The channels and frequency ranges
supported are board-dependent. The function MUST return Ok(()) if repeated
analog conversions have been started, OFF if the ADC is not initialized or
enabled, BUSY if a conversion is already in progress, or INVAL if the
specified channel or frequency are invalid.
The stop_sampling function can be used to stop any sampling operation,
single, continuous, or high speed. Conversions which have already begun are
canceled. stop_sampling MUST be safe to call from any callback in the Client
or HighSpeedClient traits. The function MUST return Ok(()), OFF, or INVAL.
Ok(()) indicates that all conversions are stopped and no further callbacks
will occur, OFF means the ADC is not initialized or enabled, and INVAL means
the ADC was not active.
The channel type is used to signify which ADC channel to sample data on for
various commands. What it maps to is implementation-specific, possibly an I/O
pin number or abstract notion of a channel. One approach used for channels by
the SAM4L implementation is for the capsule to keep an array of possible
channels, which are connected to pins by the board main.rs file, and selected
from by userland applications.
3 Client trait
The Client trait handles responses from Adc trait sampling commands. It is implemented by capsules to receive chip driver responses. It has one function:
#![allow(unused)] fn main() { /// Trait for handling callbacks from simple ADC calls. pub trait Client { /// Called when a sample is ready. fn sample_ready(&self, sample: u16); } }
The sample_ready function is called whenever data is available from a
sample or sample_continuous call. It is safe to call stop_sampling within
the sample_ready callback. The sample data returned is a maximum of 16 bits
in resolution, with the exact data resolution being chip-specific. If data is
less than 16 bits (for example 12-bits on the SAM4L), it SHOULD be placed in
the least significant bits of the sample value.
4 AdcHighSpeed trait
The AdcHighSpeed trait is used for sampling data at high frequencies such that
receiving individual samples would be untenable. Instead, it provides an
interface that returns buffers filled with samples. This trait relies on the
Adc trait being implemented as well in order to provide primitives like
initialize and stop_sampling which are used for ADCs in this mode as well.
While we expect many chips to support the Adc trait, we expect the AdcHighSpeed
trait to be implemented due to a high-speed sampling need on a platform. The
trait has three functions:
#![allow(unused)] fn main() { /// Interface for continuously sampling at a given frequency on a channel. /// Requires the AdcSimple interface to have been implemented as well. pub trait AdcHighSpeed: Adc { /// Start sampling continuously into buffers. /// Samples are double-buffered, going first into `buffer1` and then into /// `buffer2`. A callback is performed to the client whenever either buffer /// is full, which expects either a second buffer to be sent via the /// `provide_buffer` call. Length fields correspond to the number of /// samples that should be collected in each buffer. If an error occurs, /// the buffers will be returned. fn sample_highspeed(&self, channel: &Self::Channel, frequency: u32, buffer1: &'static mut [u16], length1: usize, buffer2: &'static mut [u16], length2: usize) -> (Result<(), ErrorCode>, Option<&'static mut [u16]>, Option<&'static mut [u16]>); /// Provide a new buffer to fill with the ongoing `sample_continuous` /// configuration. /// Expected to be called in a `buffer_ready` callback. Note that if this /// is not called before the second buffer is filled, samples will be /// missed. Length field corresponds to the number of samples that should /// be collected in the buffer. If an error occurs, the buffer will be /// returned. fn provide_buffer(&self, buf: &'static mut [u16], length: usize) -> (Result<(), ErrorCode>, Option<&'static mut [u16]>); /// Reclaim ownership of buffers. /// Can only be called when the ADC is inactive, which occurs after a /// successful `stop_sampling`. Used to reclaim buffers after a sampling /// operation is complete. Returns success if the ADC was inactive, but /// there may still be no buffers that are `some` if the driver had already /// returned all buffers. fn retrieve_buffers(&self) -> (Result<(), ErrorCode>, Option<&'static mut [u16]>, Option<&'static mut [u16]>); fn set_highspeed_client(&self, client: &'static dyn HighSpeedClient); } }
The sample_highspeed function is used to perform high-speed double-buffered
sampling. After the first buffer is filled with samples, the samples_ready
function will be called and sampling will immediately continue into the second
buffer in order to reduce jitter between samples. Additional buffers SHOULD be
passed through the provide_buffer call. However, if none are provided, the
driver MUST cease sampling once it runs out of buffers. In case of an error,
the buffers will be immediately returned from the function. The channels and
frequencies acceptable are chip-specific. The return code MUST be Ok(()) if
sampling has begun successfully, OFF if the ADC is not enabled or initialized,
BUSY if the ADC is in use, or INVAL if the channel or frequency are invalid.
The provide_buffer function is used to provide additional buffers to an
ongoing high-speed sampling operation. It is expected to be called within a
samples_ready callback in order to keep sampling running without delay. In
case of an error, the buffer will be immediately returned from the function. It
is not an error to fail to call provide_buffer and the underlying driver MUST
cease sampling if no buffers are remaining. It is an error to call
provide_buffer twice without having received a buffer through
samples_ready. The prior settings for channel and frequency will persist. The
return code MUST be Ok(()) if the buffer has been saved for later use, OFF if
the ADC is not initialized or enabled, INVAL if there is no currently running
continuous sampling operation, or BUSY if an additional buffer has already
been provided.
The retrieve_buffers function returns ownership of all buffers owned by the
chip implementation. All ADC operations MUST be stopped before buffers are
returned. Any data within the buffers SHOULD be considered invalid. It is
expected that retrieve_buffers will be called from within a samples_ready
callback after calling stop_sampling. Up to two buffers will be returned by
the function. The return code MUST be Ok(()) if the ADC is not in operation
(although as few as zero buffers may be returned), INVAL MUST be returned if
an ADC operation is still in progress.
5 HighSpeedClient trait
The HighSpeedClient trait is used to receive samples from a call to
sample_highspeed. It is implemented by a capsule to receive chip driver
responses. It has one function:
#![allow(unused)] fn main() { /// Trait for handling callbacks from high-speed ADC calls. pub trait HighSpeedClient { /// Called when a buffer is full. /// The length provided will always be less than or equal to the length of /// the buffer. Expects an additional call to either provide another buffer /// or stop sampling fn samples_ready(&self, buf: &'static mut [u16], length: usize); } }
The samples_ready function receives a buffer filled with up to length
number of samples. Each sample MAY be up to 16 bits in size. Smaller samples
SHOULD be aligned such that the data is in the least significant bits of each
value. The length field MUST match the length passed in with the buffer
(through either sample_highspeed or provide_buffer). Within the
samples_ready callback, the capsule SHOULD call provide_buffer if it wishes
to continue sampling. Alternatively, stop_sampling and retrieve_buffers
SHOULD be called to stop the ongoing ADC operation.
6 Example Implementation: SAM4L
The SAM4L ADC has a flexible ADC, supporting differential and single-ended inputs, 8 or 12 bit samples, configurable clocks, reference voltages, and grounds. It supports periodic sampling supported by an internal timer. The SAM4L ADC uses generic clock 10 (GCLK10). The ADC is peripheral 38, so its control registers are found at address 0x40038000. A complete description of the ADC can be found in Chapter 38 (Page 995) of the SAM4L datasheet.
The current implementation, found in chips/sam4l/adc.rs, implements
the Adc and AdcHighSpeed traits.
6.1 ADC Channels
In order to provide a list of ADC channels to the capsule and userland, the SAM4L implementation creates an AdcChannel struct which contains and enum defining its value. Each possible ADC channel is then statically created. Other chips may want to consider a similar system.
#![allow(unused)] fn main() { /// Representation of an ADC channel on the SAM4L. pub struct AdcChannel { chan_num: u32, internal: u32, } /// SAM4L ADC channels. #[derive(Copy,Clone,Debug)] #[repr(u8)] enum Channel { AD0 = 0x00, AD1 = 0x01, ... ReferenceGround = 0x17, } /// Initialization of an ADC channel. impl AdcChannel { /// Create a new ADC channel. /// channel - Channel enum representing the channel number and whether it is /// internal const fn new(channel: Channel) -> AdcChannel { AdcChannel { chan_num: ((channel as u8) & 0x0F) as u32, internal: (((channel as u8) >> 4) & 0x01) as u32, } } } /// Statically allocated ADC channels. Used in board configurations to specify /// which channels are used on the platform. pub static mut CHANNEL_AD0: AdcChannel = AdcChannel::new(Channel::AD0); pub static mut CHANNEL_AD1: AdcChannel = AdcChannel::new(Channel::AD1); ... pub static mut CHANNEL_REFERENCE_GROUND: AdcChannel = AdcChannel::new(Channel::ReferenceGround); }
6.2 Client Handling
As ADC functionality is split between two traits, there are two callback traits.
ADC driver implementations that use both Adc and AdcHighSpeed need two
clients, which must both be set:
#![allow(unused)] fn main() { hil::adc::Adc::set_client(&peripherals.adc, adc); hil::adc::AdcHighSpeed::set_client(&peripherals.adc, adc); }
6.3 Clock Initialization
The ADC clock on the SAM4L is poorly documented. It is required to both generate a clock based on the PBA clock as well as GCLK10. However, the clock used for samples by the ADC run at 1.5 MHz at the highest (for single sampling mode). In order to handle this, the SAM4L ADC implementation first divides down the clock to reach a value less than or equal to 1.5 MHz (exactly 1.5 MHz in practice for a CPU clock running at 48 MHz).
6.4 ADC Initialization
The process of initializing the ADC is well documented in the SAM4L datasheet, unfortunately it seems to be entirely false. While following the documentation allows for single sampling, high speed sampling fails in practice after a small number of samples (order less than 100) have been collected. After much experimentation and comparison to other SAM4L code available online, it was determined that the initialization process should be:
- Enable clock
- Configure ADC
- Reset ADC
- Enable ADC
- Wait until ADC status is set to enabled
- Enable the Bandgap and Reference Buffers
- Wait until the buffers are enabled
It is quite possible that other orders of initialization are valid, however proceed with caution.
7 Authors' Address
Philip Levis
409 Gates Hall
Stanford University
Stanford, CA 94305
phone - +1 650 725 9046
email - pal@cs.stanford.edu
Branden Ghena
email - brghena@umich.edu
8 Citations
[TRD1] Tock Reference Document (TRD) Structure and Keywords
Kernel General Purpose I/O (GPIO) HIL
TRD: 103
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Amit Levy, Philip Levis
Draft-Created: Feb 05, 2017
Draft-Modified: April 09, 2021
Draft-Version: 3
Draft-Discuss: devel@lists.tockos.org
Abstract
This document describes the hardware independent layer interface (HIL) for General Purpose Input/Output (GPIO) in the Tock operating system kernel. It describes the Rust traits and other definitions for this service as well as the reasoning behind them. This document is in full compliance with TRD1.
1 Introduction
General Purpose Input/Output (GPIO) controls generic pins. User code can control the output level on the pin (high or low), read the externally drive logic level and often configure pull-up or pull-down resistence. Typically, microcontrollers expose pins in groups called ports however Tock's GPIO HIL exposes pins individually since ports often do not group pins as they are actually used on a board. Software that wishes to control a whole port (e.g. for efficiency) should use the per-chip implementation, which may export this feature.
The GPIO HIL is the kernel crate, in module hil::gpio. It provides the following traits:
kernel::hil::gpio::Outputcontrols an output pin.kernel::hil::gpio::Inputcontrols an input pin.kernel::hil::gpio::Configureconfigures a pin.kernel::hil::gpio::ConfigureInputOutputconfigures a pin that can simultaneously be an input and an output (some hardware supports this. It depends onConfigure).kernel::hil::gpio::Interruptcontrols an interrupt pin. It depends onInput.kernel::hil::gpio::Clienthandles callbacks from pin interrupts.kernel::hil::gpio::InterruptWithValuecontrols an interrupt pin that provides a value in its callbacks. It depends onInput.kernel::hil::gpio::ClientWithValuehandles callbacks from pin interrupts that provide a value (InterruptWithValue).kernel::hil::gpio::Pin depends onInput,Output, andConfigure`.kernel::hil::gpio::InterruptPin depends onPinandInterrupt`.kernel::hil::gpio::InterruptValuePin depends onPinandInterruptWithValue`.
The rest of this document discusses each in turn.
2 Output
The Output trait controls a pin that is an output. It has
four methods:
#![allow(unused)] fn main() { pub trait Output { /// Set the GPIO pin high. If the pin is not an output or /// input/output, this call is ignored. fn set(&self); /// Set the GPIO pin low. If the pin is not an output or /// input/output, this call is ignored. fn clear(&self); /// Toggle the GPIO pin. If the pin was high, set it low. If /// the pin was low, set it high. If the pin is not an output or /// input/output, this call is ignored. Return the new value /// of the pin (false is cleared, true is set). fn toggle(&self) -> bool; /// Activate or deactivate a GPIO pin, for a given activation mode. fn write_activation(&self, state: ActivationState, mode: ActivationMode); } }
The write_activation method has a default implementation. This method
allows software to interact with a GPIO using logical, rather than physical
behavior. For example, consider a button which is "active" when it is
pushed. If the button is connected to ground and a pull-up input pin,
then it is active when the pin is low; if it is connected to Vdd and
a pull-down input pin, it is active when the pin is high. Similarly,
an LED may be connected through an PNP transistor, whose base is
controlled by a GPIO pin, such that setting the pin low turns on the
LED and setting the pin high turns it off. Rather than keeping track
of these polarities, software can use ActivationState to specify
whether the device should be active or inactive, and ActivationMode
specifies the polarity.
#![allow(unused)] fn main() { #[derive(Clone, Copy, PartialEq, Eq)] pub enum ActivationState { Inactive = 0, Active = 1, } /// Whether a GPIO is in the `ActivationState::Active` when the signal is high /// or low. #[derive(Clone, Copy)] pub enum ActivationMode { ActiveHigh, ActiveLow, } }
3 Input
The Input trait controls an input pin. It has two methods:
#![allow(unused)] fn main() { pub trait Input { /// Get the current state of an input GPIO pin. For an output /// pin, return the output; for an input pin, return the input; /// for disabled or function pins the value is undefined. fn read(&self) -> bool; /// Get the current state of a GPIO pin, for a given activation mode. fn read_activation(&self, mode: ActivationMode) -> ActivationState { let value = self.read(); match (mode, value) { (ActivationMode::ActiveHigh, true) | (ActivationMode::ActiveLow, false) => { ActivationState::Active } (ActivationMode::ActiveLow, true) | (ActivationMode::ActiveHigh, false) => { ActivationState::Inactive } } } } }
The read_activation method is similar to the write_activation method in Output,
described below, but operates on input rather than output bits.
4 Configure
The Configure trait allows a caller to configure a GPIO pin. It has 10 methods,
two of which have default implementations.
#![allow(unused)] fn main() { pub enum Configuration { LowPower, // Cannot be read or written or used; effectively inactive. Input, // Calls to the `Input` trait are valid. Output, // Calls to the `Output` trait are valid. InputOutput, // Calls to both the `Input` and `Output` traits are valid. Function, // Chip-specific, requires chip-specific API for more detail, Other, // In a state not covered by other values. } pub enum FloatingState { PullUp, PullDown, PullNone, } pub trait Configure { fn configuration(&self) -> Configuration; fn make_output(&self) -> Configuration; fn disable_output(&self) -> Configuration; fn make_input(&self) -> Configuration; fn disable_input(&self) -> Configuration; fn deactivate_to_low_power(&self); fn set_floating_state(&self, state: FloatingState); fn floating_state(&self) -> FloatingState; // Have default implementations fn is_input(&self) -> bool; fn is_output(&self) -> bool; } }
The Configuration enum describes the current configuration of a pin.
The key property of the enumeration, which prompts its use, is the
fact that some hardware allows a pin to simultaneously be an input
and an output, while in other hardware these states are mutually
exclusive. For example, the Atmel SAM4L GPIO pins are always inputs,
and reading them "indicates the level of the GPIO pins regardless of
the pins being driven by the GPIO or by an external component". In
contrast, on the nRF52 series, a GPIO pin is either an input or
an output.
The Configuration enumeration encapsulates this by reporting
the current configuration after a change. For example, suppose
a pin has Configuration::Input and software calls make_output
on it. A SAM4L will return Configuration::InputOutput while
an nRF52 will return Configuration::Output.
If a client requires a pin be both an input and an output, it can
use the ConfigureInputOutput trait:
#![allow(unused)] fn main() { pub trait ConfigureInputOutput: Configure { /// Make the pin a simultaneously input and output; should always /// return `Configuration::InputOutput`. fn make_input_output(&self) -> Configuration; fn is_input_output(&self) -> bool; } }
Chips that support simultaneous input/output MAY implement this trait, while others that do not support simultaneous input/output MUST NOT implement this trait. Therefore, at compile time, one can distinguish whether the client can operate properly.
The Configure::deactivate_to_low_power method exists because the best
configuration for GPIO pins can depend not only on the chip but
also how they are connected in a system. This method puts the
pin into whatever state is lowest power and causes it to be
both unreadable and unwritable. E.g., even if the lowest power
state is as a pull-down input, when in this state a client cannot
read the pin. Blocking functionality in this way tries to
prevent clients making assumptions about the underlying hardware.
5 Interrupt and Client
The Interrupt and Client traits are how software can control
and handle interrupts generated from a GPIO pin.
#![allow(unused)] fn main() { pub enum InterruptEdge { RisingEdge, FallingEdge, EitherEdge, } pub trait Interrupt<'a>: Input { fn set_client(&self, client: &'a dyn Client); fn enable_interrupts(&self, mode: InterruptEdge); fn disable_interrupts(&self); fn is_pending(&self) -> bool; } pub trait Client { fn fired(&self); } }
These traits assume that hardware can generate interrupts
on rising, falling, or either edges. They do not support
level (high/low) interrupts. Some hardware does not support
level interrupts. The nRF52 GPIOTE peripheral, for example,
doesn't. Chips or capsules that wish to support level interrupts
can define a new trait that depends on the Interrupt trait.
An important aspect of these traits is that they cannot fail.
For example, enable_interrupts does not return anything,
so there is no way to signal failure. Because interrupts
are an extremely low-level aspect of the kernel, these traits
preclude there being complex conditional logic that might cause
them to fail (e.g., some form of dynamic allocation or
mapping). Interrupt implementations that can fail at runtime
should define and use alternative traits.
5 InterruptWithValue and ClientWithValue
The InterruptWithValue and ClientWithValue traits extend
interrupt handling to pass a value with an interrupt. This
is useful when a single method needs to handle callbacks
from multiple pins. Each pin's interrupt can have a different
value, and the callback function can determine which pin
the interrupt is from based on the value passed. This
is used, for example, in the GPIO capsule that allows
userspace to handle interrupts from multiple interrupt pins.
If there weren't a ClientWithValue trait, the capsule would
have to define N different callback methods for N pins. These
would likely each then call a helper function with a parameter
indicating which one was invoked: ClientWithValue provides
this mechanism automatically.
#![allow(unused)] fn main() { pub trait InterruptWithValue<'a>: Input { fn set_client(&self, client: &'a dyn ClientWithValue); fn enable_interrupts(&self, mode: InterruptEdge) -> Result<(), ErrorCode>; fn disable_interrupts(&self); fn is_pending(&self) -> bool; fn set_value(&self, value: u32); fn value(&self) -> u32; } pub trait ClientWithValue { fn fired(&self, value: u32); } }
The InterruptWithValue trait does not depend on the
Interrupt trait because its client has a different type.
Supporting both types of clients would require case logic
within the GPIO implementation, whose cost (increased storage
for the variably-typed reference, increased code for handling
the cases) is not worth the benefit (being able to pass a
Client to an InterruptWithValue.
The GPIO HIL provides a standard implementation of a wrapper
that implements InterruptWithValue. It wraps around an
implementation of Interrupt, defining itself as a Client
and using Client:callback to invoke ClientWithValue::callback.
#![allow(unused)] fn main() { impl<'a, IP: InterruptPin<'a>> InterruptValueWrapper<'a, IP> { pub fn new(pin: &'a IP) -> Self {...} }
InterruptValueWrapper implements InterruptWithValue, Client,
Input, Output, and Configure.
6 Composite Traits: Pin, InterruptPin, InterruptValuePin
The GPIO HIL uses fine-grained traits in order to follow the security principle of least privilege. For example, something that needs to be able to read a GPIO pin should not necessarily be able to reconfigure or write to it. However, because handling multiple small traits at once can be cumbersome, the GPIO HIL defines several standard composite traits:
#![allow(unused)] fn main() { pub trait Pin: Input + Output + Configure {} pub trait InterruptPin<'a>: Pin + Interrupt<'a> {} pub trait InterruptValuePin<'a>: Pin + InterruptWithValue<'a> {} }
6 Example Implementation
As of this writing (April 2021; Tock v1.6 and v2.0), there are example implementations of the GPIO HIL for the Atmel
SAM4L, lowRISC, nrf5x, sifive, stm32f303xc, stm32f4xx, imxrt10xx,
apollo3, and msp432 chips. The lowrisc, sam4l, and sifive chips
support Configuration::InputOutput mode, while the others
support only input or output mode.
7 Authors' Address
Philip Levis
414 Gates Hall
Stanford University
Stanford, CA 94305
email: Philip Levis <pal@cs.stanford.edu>
phone: +1 650 725 9046
Amit Levy
email: Amit Levy <aalevy@cs.princeton.edu>
System Calls
TRD: 104
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Hudson Ayers, Guillaume Endignoux, Jon Flatley, Philip Levis, Amit Levy, Pat Pannuto, Leon Schuermann, Johnathan Van Why, dcz
Draft-Created: August 31, 2020
Draft-Modified: January 29, 2025
Draft-Version: 11
Draft-Discuss: devel@lists.tockos.org
Abstract
This document describes the system call application binary interface (ABI) between user space processes and the Tock kernel for 32-bit ARM Cortex-M and RISC-V RV32I platforms.
1 Introduction
The Tock operating system can run multiple independent userspace applications. Each application image is a separate process: it has its own address space and thread stack. Because applications are untrusted, the kernel uses hardware memory protection to isolate the kernel from processes. This allows applications written in C (or even assembly) to safely run on Tock. Applications invoke operations on and receive upcalls from the Tock kernel through the system call programming interface.
This document describes Tock's system call programming interface (API) and application binary interface (ABI) for 32-bit ARM Cortex-M and RISC-V RV32I platforms. It describes the system calls that Tock implements, their semantics, and how a userspace process invokes them. The ABI for other architectures, if supported, will be described in other documents.
2 Design Considerations
Three design considerations guide the design of Tock's system call API and ABI.
- Tock is currently supported on the ARM CortexM and RISC-V architectures. It may support others in the future. Its ABI must support both architectures and be flexible enough to support future ones.
- Tock userspace applications can be written in any language. The system call API must support their calling semantics in a safe way. Rust is especially important.
- Both the API and ABI must be efficient and support common call patterns in an efficient way.
2.1 Architectural Support and ABIs
The primary question for the ABI is how many and which registers transfer data between the kernel and userspace. Passing more registers has the benefit of the kernel and userspace being able to transfer more information without relying on pointers to memory structures. It has the cost of requiring every system call to transfer and manipulate more registers.
2.2 Programming Language APIs
Userspace support for Rust is an important requirement for Tock. A key invariant in Rust is that a given memory object can either have multiple references or a single mutable reference. If userspace passes a writeable (mutable) buffer into the kernel, it must relinquish any references to that buffer. As a result, the only way for userspace to regain a reference to the buffer is for the kernel to pass it back.
2.3 Efficiency
Programming language calling conventions are another consideration because they affect efficiency. For example, the C calling convention in ARM says that the first four arguments to a function are stored in r0-r3. Additional arguments are stored on the stack. Therefore, if the system call ABI says that arguments are stored in different registers than r0-r3, a C function call that invokes a system call will need to move the C arguments into those registers.
3 System Call ABI
This section describes the ABI for Tock on 32-bit platforms, including the exact register mappings for the CortexM and 32-bit RISC-V architectures. The ABI for 64-bit platforms is currently undefined but may be specified in a future TRD. The register mappings for future 32-bit architectures can be specified in supplemental TRDs.
3.1 Registers
When userspace invokes a system call, it passes 4 registers to the kernel as arguments. It also pass an 8-bit value of which type of system call (see Section 4) is being invoked (the Syscall Class ID). When the system call returns, it returns 4 registers as return values. When the kernel invokes an upcall on userspace, it passes 4 registers to userspace as arguments and has no return value.
| CortexM | RISC-V | |
|---|---|---|
| Syscall Arguments | r0-r3 | a0-a3 |
| Syscall Return Values | r0-r3 | a0-a3 |
| Syscall Class ID | svc | a4 |
| Upcall Arguments | r0-r3 | a0-a3 |
| Upcall Return Values | None | None |
How registers are mapped to arguments can affect performance and code size.
For system calls implemented by capsules and drivers (command, subscribe,
and allow), arguments that are passed to these calls should be placed
in the same registers that will be used to invoke those calls. This allows
the system call handlers in the kernel to pass them unchanged, rather than
have to move them between registers.
For example, command has this signature:
#![allow(unused)] fn main() { fn command(&self, minor_num: usize, r2: usize, r3: usize, caller_id: AppId) -> Result<(), ErrorCode> }
This means that the value which will be passed as r2 to the command
should be placed in register r2 when userspace invokes the system
call. That way, the system call handler can just leave register r2
unchanged. If, instead, the argument r2 were passed in register r3,
the system call handler would have to spend an instruction moving
register r3 to register r2.
Driver system call implementations in the Tock kernel typically pass a reference
to self as their first argument. Therefore, r0 is usually used to dispatch
onto the correct driver; this argument is consumed by the system call handler
and replaced with &self when the actual system call method is invoked.
3.2 Syscall Argument Types
The use of registers, and the selection of specific registers, imposes physical restrictions on the types which can be passed (i.e., this TRD defines the ABI for platforms with 32-bit, general purpose registers, which limits any single argument to a maximum of 32-bit storage for its type).
Syscalls SHOULD define as specific a type as is semantically meaningful for
these 32 bits of storage. For example, the command syscall uses register 0 as
a Driver Number and register 1 as a Command Number. These are defined as a
u32, as Tock expects no more than 2^32 drivers, each with no more than 2^32
commands. A future 64-bit ABI MAY choose to combine these into one syscall
register. In contrast, other syscall argument slots may have more generic
purposes, where the type and underlying storage are likely to move in sync on
future platforms. This document defines the following conceptual types:
| Type | C Analog | Description |
|---|---|---|
| OPAQUE_NUMERIC | (unsigned) int | A whole number which is capable of being expressed in a native machine word type. |
| SIZE OPAQUE_SIZE |
size_t | An unsigned, numeric type with a range capable of expressing in bytes the size of any valid contiguous object. |
| POINTER_OR_ZERO OPAQUE_POINTER_OR_ZERO |
void * | A type capable of holding a pointer to a valid memory location OR the value `0`, which is defined as the NULL sentinel. |
| C_FUNCTION_POINTER_OR_ZERO | This describes an argument which holds a pointer to an executable function, where the function adheres to the standard C ABI for the platform (akin to extern C in C++ or extern "C" fn in Rust) OR the value 0, which is defined as the NULL sentinel. | |
| OPAQUE_GENERIC | This describes an argument with no restrictions on type. |
Types prefixed with OPAQUE are those where the kernel SHOULD NOT attempt to
read the value. OPAQUE types are generally for pass-through use cases, where
userspace passes a value back to itself through the kernel. OPAQUE types,
including OPAQUE_GENERIC, MAY have additional metadata associated with them
(e.g. pointer provenance or tags) which the kernel MUST preserve.
Note: There is no NUMERIC type, only OPAQUE_NUMERIC, as any use by the
kernel of machine-width generic number type almost certainly invites the design
of an ABI which is not portable across architectures.
Note: Historically, Rust conflated some of these concepts with usize,
however, legacy platforms (e.g., those with segmented memory) as well as
emerging security-oriented platforms (e.g., those with tagged pointers) require
distinguishing these cases.
3.3 Return Values
All system calls have the same return value format. A system call can
return one of several variants, having different associated value types,
which are shown here. r0-r3 refer to the return value registers:
for CortexM they are r0-r3 and for RISC-V they are a0-a3.
| System call return variant | r0 | r1 | r2 | r3 |
|---|---|---|---|---|
| Failure | 0 | Error code | - | - |
| Failure with u32 | 1 | Error code | Return Value 0 | |
| Failure with 2 u32 | 2 | Error code | Return Value 0 | Return Value 1 |
| Failure with u64 | 3 | Error code | Return Value 0 LSB | Return Value 0 MSB |
| Success | 128 | |||
| Success with u32 | 129 | Return Value 0 | ||
| Success with 2 u32 | 130 | Return Value 0 | Return Value 1 | |
| Success with u64 | 131 | Return Value 0 LSB | Return Value 0 MSB | |
| Success with 3 u32 | 132 | Return Value 0 | Return Value 1 | Return Value 2 |
| Success with u32 and u64 | 133 | Return Value 0 | Return Value 1 LSB | Return Value 1 MSB |
There are many failure and success variants because
different system calls need to pass different amounts of data. A
command that requests a 64-bit timestamp, for example, needs its
success to return a u64, but its failure can return nothing. In
contrast, a system call that passes a pointer into the kernel may have
a simple success return value but requires a failure with one 32-bit
value so the pointer can be passed back.
Every system call MUST return only one failure and only one success variant. Different system calls may use different failure and success variants, but any specific system call returns exactly one of each. If an operation might have multiple success return variants or failure return variants, then it MUST be split into multiple system calls.
This requirement of a single failure variant and a single success
variant is to simplify userspace implementations and preclude them
from having to handle many different cases. The presence of many
difference cases suggests that the operation should be split up, as
there is non-determinism in its execution or its meaning is
overloaded. The requirement of a single failure and a single success
variant also fits well with Rust's Result type.
If userspace tries to invoke a system call that the kernel does not
support, the system call will return a Failure result with an error
code of NODEVICE or NOSUPPORT (Section 4). As the Allow and
Subscribe system call classes have defined Failure types, the kernel can
produce the expected type with known failure variants. Command, however,
can return any variant. This means that Commands can appear to have
two failure variants: the one expected (e.g., Failure with u32) as well
as Failure. To avoid this ambiguity for NODEVICE, userspace can use the
reserved "exists" command (Command Identifier 0), described in Section
4.3.1. If this command returns Success, the driver is installed and will
not return a Failure with NODEVICE for Commands. The driver may still
return NOSUPPORT, however. Because this implies a misunderstanding of
the system call API by userspace (it is invoking system calls that do not
exist), userspace is responsible for handling this case.
For all Failure types, the passed Error code MUST be placed in r1.
All 32-bit values not specified for r0 in the above table are reserved.
Reserved r0 values MAY be used by a future TRD and MUST NOT be returned by the
kernel unless specified in a TRD. Therefore, for future compatibility, userspace
code MUST handle r0 values that it does not recognize.
3.4 Error Codes
All system call failures return an error code. These error codes are a superset of kernel error codes. They include all kernel error codes so errors from calls on kernel HILs can be easily mapped to userspace system calls when suitable. There are additional error codes to include errors related to userspace.
| Value | Error Code | Meaning |
|---|---|---|
| 1 | FAIL | General failure condition: no further information available. |
| 2 | BUSY | The driver or kernel is busy: retry later. |
| 3 | ALREADY | This operation is already ongoing can cannot be executed more times in parallel. |
| 4 | OFF | This subsystem is powered off and must be turned on before issuing operations. |
| 5 | RESERVE | Making this call requires some form of prior reservation, which has not been performed. |
| 6 | INVALID | One of more of the parameters passed to the operation was invalid. |
| 7 | SIZE | The size specified is too large or too small. |
| 8 | CANCEL | The operation was actively cancelled by a call to a cancel() method or function. |
| 9 | NOMEM | The operation required memory that was not available (e.g. a grant region or a buffer). |
| 10 | NOSUPPORT | The system call is not available to or not supported for the calling process. |
| 11 | NODEVICE | The driver specified by the driver number is not available to the calling process. |
| 12 | UNINSTALLED | The resource was removed or uninstalled (e.g., an SD card). |
| 13 | NOACK | The packet transmission was sent but not acknowledged. |
| 1024 | BADRVAL | The variant of the return value did not match what the system call should return. |
Values in the range 1-1023 reflect kernel return value error codes. Kernel error codes not specified above are reserved. TRDs MAY specify additional kernel error codes from these reserved values, but MUST NOT specify kernel error codes greater than 1023. The Tock kernel MUST NOT return an error code unless the error code is specified in a TRD.
Values greater than 1023 are reserved for userspace library use. Value 1024 (BADRVAL) is for when a system call returns a different failure or success variant than the userspace library expects.
3.5 Returning To Userspace
When the kernel returns to userspace, it only gets to set registers for one stack frame. In practice, we have two cases:
Direct Resume
Userspace resumes execution directly after the svc invocation, so the
assembly that follows the svc command can use the values in r0-r3
as-set by the kernel.
Pushed Callback
Userspace resumes execution at the start of the callback function.
The values in r0-r3 are consumed by the callback. When the callback
finishes, it will pop {lr} (or similar), where the link register in
the callback stack frame has been set by the kernel to the instruction
after the svc that relinquished control to the kernel.
The assembly that invoked the syscall now gets to run. At this point
r0-r3 are unknown as those are caller-save registers (which means the
Upcall callback can clobber them freely). The assembly that invoked the
svc cannot make any assumptions about the values in r0-r3, nor can the
kernel use them to pass things "to" the calling assembly. Thus, the
PushedCallback case has to use a pointer-based approach for the kernel
to communicate with the assembly that invokes the svc (e.g.
yield-param-A in Yield-NoWait).
4 System Call API
Tock has 7 classes or types of system calls. When a system call is invoked, the class is encoded as the Syscall Class Number. Some system call classes are implemented by the core kernel and so the supported calls are the same across kernels. Others are implemented by system call drivers, which can be added and removed in different kernel builds. The full set of valid system calls a kernel supports therefore depends on what system call drivers it has installed.
The 7 classes are:
| Syscall Class | Syscall Class Number |
|---|---|
| Yield | 0 |
| Subscribe | 1 |
| Command | 2 |
| Read-Write Allow | 3 |
| Read-Only Allow | 4 |
| Memop | 5 |
| Exit | 6 |
All of the system call classes except Yield and Exit are non-blocking. When a userspace process calls a Subscribe, Command, Read-Write Allow, Read-Only Allow, or Memop syscall, the kernel will not put the process on a wait queue while handling the syscall. Instead, the kernel will complete the syscall and prepare the return value for the syscall immediately. The kernel scheduler may not, however, run the process immediately after handling the syscall, and may instead decide to suspend the process due to a timeslice expiration or the kernel thread being runnable. If an operation is long-running (e.g., I/O), its completion is signaled by an upcall (see the Subscribe call in 4.2).
Successful calls to Exit system calls do not return (the process exits).
System calls implemented by system call drivers (Subscribe, Command,
Read-Write Allow, Read-Only Allow) all include two arguments, a driver number
and a syscall number. The driver number specifies which system
call driver to invoke. The syscall number (which is different than
the Syscall Class Number in the table above) specifies which instance of
that system call on that driver to invoke. Both arguments are unsigned
32-bit integers. For example, by convention the Console system call driver
has driver number 0x1 and a Command to the console driver with
syscall number 0x2 starts receiving console data into a buffer.
If userspace invokes a system call on a peripheral driver that is not
installed in the kernel, the kernel MUST return a Failure result with
an error of NODEVICE. If userspace invokes an unrecognized system call
on a peripheral driver, the peripheral driver MUST return a Failure
result with an error of NOSUPPORT.
4.1 Yield (Class ID: 0)
The Yield system call class is how a userspace process handles
upcalls, relinquishes the processor to other processes, or waits for
one of its long-running calls to complete. The Yield system call
class implements the only blocking system calls in Tock that return:
Yield-Wait and Yield-WaitFor.
The kernel invokes upcalls only in response to Yield
system calls.
There are three Yield system call variants:
- Yield-Wait
- Yield-NoWait
- Yield-WaitFor
The register arguments for Yield system calls are as follows. The registers r0-r3 correspond to r0-r3 on CortexM and a0-a3 on RISC-V.
| Argument | Register | Type |
|---|---|---|
| Yield number | r0 | u32 |
| yield-param-A | r1 | varies |
| yield-param-B | r2 | varies |
| yield-param-C | r3 | varies |
The Yield number (in r0) specifies which call is invoked:
| System call | Yield number value |
|---|---|
| yield-no-wait | 0 |
| yield-wait | 1 |
| yield-wait-for | 2 |
All other yield number values are reserved. If an invalid yield number
is passed the kernel MUST return immediately and MUST NOT
use yield-param-A, yield-param-B, or yield-param-C.
The meaning of yield-param-X is specific to the yield type.
4.1.1 Yield-NoWait
| Argument | Register | Type | Value |
|---|---|---|---|
| Yield number | r0 | u32 | 0 |
| yield-param-A | r1 | *mut [u8; 1] | Pointer to one byte of userspace memory or 0x0 |
Yield number 0, Yield-NoWait, executes a single upcall if any is pending. If no upcalls are pending it returns immediately. There are no return values from Yield-NoWait. This is because if an upcall was invoked, the kernel pushes that function call onto the stack, such that the return value may be the return value of the upcall.
Yield-NoWait will use
yield-param-A as the memory address of an 8-bit byte to
write to indicate whether an upcall was invoked. If invoking Yield-NoWait
resulted in an upcall executing, Yield-NoWait writes 1 to the field address. If
invoking Yield-NoWait resulted in no upcall executing, Yield-NoWait writes 0 to the
field address. Userspace SHOULD ensure that yield-param-A points to a valid address
in the current process. If userspace does not wish to receive the Yield-NoWait
result, it SHOULD set yield-param-A to 0x0. The kernel SHALL write the Yield-NoWait result
if yield-param-A points to any valid process memory and SHALL NOT write the Yield-NoWait
result if it points to an address not in the memory allocated to the
calling process.
Yield-NoWait can use the Yield-NoWait result to allow userspace loops that want to flush the upcall queue to execute Yield-NoWait until the queue is empty.
yield-param-B and yield-param-C are unused and reserved.
4.1.2 Yield-Wait
| Argument | Register | Type | Value |
|---|---|---|---|
| Yield number | r0 | u32 | 1 |
Yield number 1, Yield-Wait, blocks until an upcall executes. It is commonly used when applications have no other work to do and are waiting for an event (upcall) to occur to do more work.
This call will deliver events to the userspace application in the order they occurred in time in the kernel. If an application has multiple subscriptions, the userspace upcall handler is responsible for in some way noting which callback occurred if necessary.
Note: This will only return after an upcall executes. If an event occurs which would normally generate an upcall, but that upcall is currently assigned to the Null Upcall, no upcall executes and thus this syscall will not return.
Yield-Wait has no return value. This is because invoking an upcall pushes that function call onto the stack, such that the return value of a call to yield system call may be the return value of the upcall.
yield-param-A, yield-param-B, and yield-param-C are unused and reserved.
4.1.3 Yield-WaitFor
| Argument | Register | Type | Value |
|---|---|---|---|
| Yield number | r0 | u32 | 2 |
| yield-param-A | r1 | u32 | Driver number |
| yield-param-B | r2 | u32 | Subscribe number |
The third call, Yield-WaitFor, blocks until one specific upcall is ready to execute. If other events arrive that would invoke an upcall on this process, they are queued by the kernel, and will be delivered in response to subsequent Yield calls. Event order in this queue is maintained.
The specific upcall is identified by a Driver number and a Subscribe number (which together form an UpcalId).
- Driver number:
yield-param-A - Subscribe number:
yield-param-B
This process will resume execution when an event in the kernel generates an upcall that matches the specified upcall. No userspace callback function will invoked by the kernel. Instead, the contents of r0-r2 will be set to the Upcall Arguments provided by the driver when the upcall is scheduled.
yield-param-C is unused and reserved.
4.2 Subscribe (Class ID: 1)
The Subscribe system call class is how a userspace process registers upcalls with the kernel. Subscribe system calls are implemented by peripheral syscall drivers, so the set of valid Subscribe calls depends on the platform and what drivers were compiled into the kernel.
The register arguments for Subscribe system calls are as follows. The registers r0-r3 correspond to r0-r3 on CortexM and a0-a3 on RISC-V.
| Argument | Register | Type |
|---|---|---|
| Driver number | r0 | u32 |
| Subscribe number | r1 | u32 |
| Upcall pointer | r2 | C_FUNCTION_POINTER |
| Application data | r3 | OPAQUE_GENERIC |
The upcall pointer is the address of the first instruction of
the upcall function. The application data argument is a parameter
that an application passes in and the kernel passes back in upcalls
unmodified.
The upcall pointer SHOULD be a valid upcall, i.e., either a
SubscribeUpcall or the Null Upcall, as defined in the next section.
If the passed upcall is not valid (is outside process executable
memory and is not the Null Upcall described below), the kernel MUST
NOT invoke the requested driver and MUST immediately return a failure
with a error code of INVALID. The currently registered upcall
remains registered and the kernel does not cancel any pending invocations
of the existing upcall.
Any upcall passed from a process MUST remain valid until the next
successful invocation of subscribe by that process with the same
syscall and driver number. When a process makes a successful
subscribe system call (one which results in the Success with 2 u32
return variant), the kernel MUST cancel all pending upcalls on that
process for that driver and subscribe number: it MUST NOT invoke
the previous upcall after the call to subscribe, and MUST NOT
invoke the new upcall for events that the kernel handled before the
call to subscribe.
Note that these semantics create a period over which upcalls might
be lost: any upcalls that were pending when subscribe was called
will not be invoked. On one hand, losing upcalls can create strange
behavior in userspace. On the other, ensuring correctness is
difficult. If the pending upcalls are invoked on the old function,
there is a safety/liveness issue; this means that an upcall function
must exist after it has been removed, and so for safety may need to be
static (exist for the lifetime of the process). Therefore, to allow
dynamic upcalls, an upcall can't be invoked after it's
unregistered.
Invoking the new upcall in response to prior events has its own correctness issues. For example, suppose that userspace registers an upcall for receiving a certain type of event (e.g., a rising edge on a GPIO pin). It then changes the type of event (to falling edge) and registers a new upcall. Invoking the new upcall on the previous events will be incorrect.
If userspace requires that it not lose any upcalls, it should not re-subscribe and instead use some form of userspace dispatch.
The return variants for Subscribe system calls are Failure with 2 u32
and Success with 2 u32. For success, the first u32 is the upcall
pointer passed in the previous call to Subscribe (the existing
upcall) and the second u32 is the application data parameter passed
in the previous call to Subscribe (the existing application data). For
failure, the first u32 is the passed upcall pointer and the second
u32 is the passed application data parameter. For the first successful
call to Subscribe for a given upcall, the upcall pointer and
application data parameter returned MUST be the Null Upcall (described
below).
4.2.1 The Null Upcall
The Tock kernel defines an upcall pointer as the Null Upcall. The Null Upcall denotes an upcall that the kernel will never invoke. The Null Upcall is used for two reasons. First, a userspace process passing the Null Upcall as the upcall pointer for Subscribe indicates that there should be no more upcalls. Second, the first time a userspace process calls Subscribe for a particular upcall, the kernel needs to return an upcall pointer and application data parameter indicating the current configuration; in this case, the kernel returns the Null Upcall. The Tock kernel MUST NOT invoke the Null Upcall.
The Null Upcall upcall pointer MUST be 0x0. This means it is not possible for userspace to pass address 0x0 as a valid code entry point. Unlike systems with virtual memory, where 0x0 can be reserved a special meaning, in microcontrollers with only physical memory 0x0 is a valid memory location. It is possible that a Tock kernel is configured so its applications start at address 0x0. However, even if they do begin at 0x0, the Tock Binary Format for application images mean that the first address will not be executable code and so 0x0 will not be a valid function. In the case that 0x0 is valid application code and where the linker places an upcall function, the first instruction of the function should be a no-op and the address of the second instruction passed instead.
If a userspace process invokes subscribe on a driver ID that is not
installed in the kernel, the kernel MUST return a failure with an
error code of NODEVICE and an upcall of the Null Upcall.
4.3 Command (Class ID: 2)
The Command system call class is how a userspace process calls a function in the kernel, either to return an immediate result or start a long-running operation. Command system calls are implemented by syscall drivers, so the set of valid Command calls depends on the platform and what drivers were compiled into the kernel.
The register arguments for Command system calls are as follows. The registers r0-r3 correspond to r0-r3 on CortexM and a0-a3 on RISC-V.
| Argument | Register | Type |
|---|---|---|
| Driver number | r0 | u32 |
| Command number | r1 | u32 |
| Argument 0 | r2 | {u32, i32, u64_lo, i64_lo} |
| Argument 1 | r3 | {u32, i32, u64_hi, i64_hi} |
When passing values with types whose representation is smaller than 32 bits
(e.g. u8 or i16), they must be explicitly cast to a u32 (if unsigned) or
i32 (if signed).
The return variants of Command are instance-specific. Each specific
Command instance (combination of Driver and Command number) specifies
its failure variant and success variant. If userspace invokes a
command on a peripheral that is not installed, the kernel returns a
failure variant of Failure, with an associated error code of
NODEVICE. Therefore, command invocations that need to
handle userspace/kernel mismatches should be able to handle Failure in
addition to the expected failure variant (if different than Failure).
4.3.1 Command Identifier 0
Command Identifier 0 provides an existence check for drivers. Command
Identifier 0 MUST return either Success or Failure with ENODEVICE.
Success indicates that the driver is present and the userspace process can
issue system calls to it. If the driver is not accessible, Command Identifier 0
returns Failure with an error code of ENODEVICE. A driver may be not
accessible because the kernel does not have it, the process does not have the
required permissions to use it, or other reasons.
4.4 Read-Write Allow (Class ID: 3)
The Read-Write Allow system call class is how a userspace process shares a buffer with the kernel that the kernel can read and write.
The register arguments for Read-Write Allow system calls are as follows. The registers r0-r3 correspond to r0-r3 on CortexM and a0-a3 on RISC-V.
| Argument | Register | Type | Additional Restrictions |
|---|---|---|---|
| Driver number | r0 | u32 | |
| Allow number | r1 | u32 | |
| Address | r2 | POINTER_OR_ZERO | Pointers must refer to a contiguous array of writable userspace memory of length {r3} |
| Size | r3 | SIZE |
The allow number argument is an ordinal number (index) of the buffer. When Read-Write Allow is called, the provided buffer SHALL get assigned to the provided allow number, replacing the previous buffer assigned to that allow number, if there was one. The supported allow numbers are defined by the driver.
The Tock kernel MUST check that the passed buffer is contained within
the calling process's writeable address space. Every byte of a passed
buffer must be readable and writeable by the process. Zero-length
buffers may therefore have arbitrary addresses. If the passed buffer is
not complete within the calling process's writeable address space, the
kernel MUST return a failure result with an error code of INVALID.
The return variants for Read-Write Allow system calls are Failure with 2 u32 and Success with 2 u32. In both cases, Argument 0
contains an address and Argument 1 contains a length. When a driver
implementing the Read-Write Allow system call returns a failure
result, it MUST return the same address and length as those that were passed
in the call. When a driver implementing the Read-Write Allow system call
returns a success result, the returned address and length MUST be those
that were passed in the previous call, unless this is the first call.
On the first successful invocation of a particular Read-Write Allow system
call, an driver implementation MUST return address 0 and size 0.
If the kernel cannot access the grant region for this process, NOMEM
will be returned. This can be caused by either running out a space in
the grant region of RAM for the process, or the grant was never registered
with the kernel during capsule creation at board startup. If the specified
allow number is not supported by the driver, the kernel will return INVALID.
The standard access model for allowed buffers is that userspace does not read or write a buffer that has been allowed: access to the memory is intended to be exclusive either to userspace or to the kernel. To regain access to a passed buffer B, the process calls the same Read-Write Allow system call again. If this call returns a success result, the result contains buffer B. The process can call with a zero-length buffer if it wishes to pass no memory to the kernel. Once a buffer has been returned to userspace as part of a Read-Write Allow system call, it is guaranteed for the kernel to no longer have access to the described memory region, unless it is currently shared with the kernel as part of the passed in buffer or another Allow mechanism.
Note that buffers held by the kernel are still considered part of a
process address space, even if conceptually the process should not
access that memory. This means, for example, that userspace may extend
a buffer by calling allow with the same pointer and a longer length
and such a call is not required to return an error code of INVALID.
Similarly, it is possible for userspace to allow the same buffer
multiple times to the kernel. This means, in practice, that the kernel
may have multiple writeable references to the same memory and MUST
take precautions to ensure this does not violate safety within the
kernel.
Finally, because a process conceptually relinquishes access to a buffer when it makes a Read-Write Allow call with it, a userspace API MUST NOT assume or rely on a process accessing an allowed buffer. If userspace needs to read or write to a buffer held by the kernel, it MUST first regain access to it by calling the corresponding Read-Write Allow.
4.4.1 Buffers Can Change
The standard use of Read-Write Allow requires that userspace does not access a buffer once it has been allowed. However, the kernel MUST NOT assume that an allowed buffer does not change: there could be a bug, compromise, or other error in the userspace code. The fact that the kernel thread always preempts any user thread in Tock allows capsules to assume that a series of accesses to an allowed buffer is atomic. However, if the capsule relinquishes execution (e.g., returns from a method called on it), it may be that userspace runs in the meantime and modifies the buffer. Note that userspace could also, in this time, issue another allow call to revoke the buffer, or crash, such that the buffer is no longer valid.
The canonical case of incorrectly assuming a buffer does not change
involves the length of a buffer. In this example, taken from the SPI
controller capsule, userspace allows a buffer, then a command
specifies a length (arg1) of how many bytes of the buffer to read or write.
The variable mlen is the length of the buffer.
#![allow(unused)] fn main() { if mlen >= arg1 && arg1 > 0 { app.len = arg1; app.index = 0; self.busy.set(true); self.do_next_read_write(app); CommandReturn::success() } }
Checking that the length fits within the allowed buffer when the
command is issued is insufficient, as it could be that the buffer
changes during the underlying hardware I/O operation. If the buffer
is replaced with one that is much smaller, the length passed in the
command may now be too large. The index variable keeps track of
where in the buffer the next write should occur: the capsule breaks up
long writes into multiple, smaller writes to bound the size of its
static kernel buffer. If capsule code blindly copies the number of
bytes specified in the command, without re-checking buffer length,
then it can cause the kernel to panic for an out-of-bounds error.
Therefore, in the read_write_done callback, the capsule checks the
length of the buffer that userspace wants to read data into. The third
line checks that the end of the just completed operation isn't past
the end of the current userspace buffer (which could happen if the
userspace buffer became shorter).
#![allow(unused)] fn main() { let end = index; let start = index - length; let end = cmp::min(end, dest.len()); let start = cmp::min(start, end); let real_len = cmp::min(end - start, src.len()); let dest_area = &mut dest[start..end]; for (i, c) in src[0..real_len].iter().enumerate() { dest_area[i] = *c; } }
For similar reasons, a capsule should not cache computations on values from an allowed buffer. If the buffer changes, then those computations may no longer be correct (e.g., computing a length based on fields in the buffer).
4.5 Read-Only Allow (Class ID: 4)
| Argument | Register | Type | Additional Restrictions |
|---|---|---|---|
| Driver number | r0 | u32 | |
| Allow number | r1 | u32 | |
| Address | r2 | POINTER_OR_ZERO | Pointers must refer to a contiguous array of readable userspace memory of length {r3} |
| Size | r3 | SIZE |
The Read-Only Allow class is very similar to the Read-Write Allow class. It differs in some ways:
- The buffer it passes to the kernel is read-only, and the process MAY freely read the buffer.
- The kernel MUST NOT write to a buffer shared with a Read-Only Allow.
- The allow numbers in the Read-Only Allow are independent from those in the Read-Write Allow.
The semantics and calling conventions of Read-Only Allow are otherwise identical to Read-Write Allow: a userspace API MUST NOT depend on writing to a shared buffer and the kernel MUST NOT assume the buffer does not change.
This restriction on writing to buffers is to limit the complexity of code review in the kernel. If a userspace library relies on writes to shared buffers, then kernel code correspondingly relies on them. This sort of concurrent access can have unforeseen edge cases which cause the kernel to panic, e.g., because values changed between method calls.
The Read-Only Allow class exists so that userspace can pass references to constant data to the kernel. This is useful, for example, when a process prints a constant string to the console; it wants to allow the constant string to the kernel as an application slice, then call a command that transmits the allowed slice. Constant strings are usually stored in flash, rather than RAM, which Tock's memory protection marks as read-only memory. Therefore, if a process tries to pass a constant string stored in flash through a Read-Write Allow, the allow will fail because the kernel detects that the passed slice is not writeable.
Another common use case for Read-Only allow is passing test or diagnostic data. A U2F authentication key, for example, will often run some cryptographic tests at boot to ensure correct operation. These tests store input data, keys, and expected output data as constants in flash. An encrypt operation, for example, wants to be able to pass a read-only input and read-only key to obtain a ciphertext. Without a read-only allow, all of this read-only data has to be copied into RAM, and for software engineering reasons these RAM buffers may be difficult to reuse.
Having a Read-Only Allow allows a system call driver to clearly specify whether data is read-only or read-write and also saves processes the RAM overhead of having to copy read-only data into RAM so it can be passed with a Read-Write Allow.
The Tock kernel MUST check that the passed buffer is contained within
the calling process's readable address space. Every byte of the passed
buffer must be readable by the process. Zero-length buffers may
therefore have arbitrary addresses. If the passed buffer is not
complete within the calling process's readable address space, the
kernel MUST return a failure result with an error code of INVALID.
4.6 Memop (Class ID: 5)
The Memop class is how a userspace process requests and provides information about its address space. The register arguments for Memop system calls are as follows. The registers r0-r3 correspond to r0-r3 on CortexM and a0-a3 on RISC-V.
| Argument | Register | Type |
|---|---|---|
| Operation | r0 | u32 |
| Operation argument | r1 | varies |
| unused | r2 | |
| unused | r3 |
The operation argument specifies which memory operation to perform. There are 12:
| Memop Operation | Operation | Success |
|---|---|---|
| 0 | Break | Success |
| 1 | SBreak | Success with u32 |
| 2 | Get process RAM start address | Success with u32 |
| 3 | Get address immediately after process RAM allocation | Success with u32 |
| 4 | Get process flash start address | Success with u32 |
| 5 | Get address immediately after process flash region | Success with u32 |
| 6 | Get lowest address (end) of the grant region | Success with u32 |
| 7 | Get number of writeable flash regions in process header | Success with u32 |
| 8 | Get start address of a writeable flash region | Success with u32 |
| 9 | Get end address of a writeable flash region | Success with u32 |
| 10 | Set the start of the process stack | Success |
| 11 | Set the start of the process heap | Success |
The success return variant is Memop class system call specific and
specified in the table above. All Memop class system calls have a
Failure failure type.
4.7 Exit (Class ID: 6)
The Exit system call class is how a userspace process terminates. Successful calls to Exit system calls do not return.
There are two Exit system calls:
exit-terminateexit-restart
The first call, exit-terminate, terminates the process and tells the
kernel that it may reclaim and reallocate the process as well as all of its
resources. Usually this indicates that the process has completed
its work.
The second call, exit-restart, terminates the process and tells the kernel
that the application would like to restart if possible. If the kernel
restarts the application, it MUST assign it a new process identifier. The
kernel MAY reuse existing process resources (e.g., RAM regions) or MAY
allocate new ones.
The register arguments for Exit system calls are as follows. The registers r0-r3 correspond to r0-r3 on CortexM and a0-a3 on RISC-V.
| Argument | Register | Type |
|---|---|---|
| Exit number | r0 | u32 |
| Completion code | r1 | u32 |
The exit number specifies which call is invoked.
| System call | Exit number value |
|---|---|
| exit-terminate | 0 |
| exit-restart | 1 |
The difference between exit-terminate and exit-restart is what behavior
the application asks from the kernel. With exit-terminate, the application
tells the kernel that it considers itself completed and does not need to run
again. With exit-restart, it tells the kernel that it would like to be
rebooted and run again. For example, exit-terminate might be used by a
process that stores some one-time data on flash, while exit-restart might
be used if the process runs out of memory.
The completion code is an unsigned 32-bit number which indicates status. This information can be stored in the kernel and used in management or policy decisions. The definition of these status codes is outside the scope of this document.
If an exit syscall is successful, it does not return. Therefore, the return
value of an exit syscall is always Failure. exit-restart and
exit-terminate MUST always succeed and so never return.
5 libtock-c Userspace Library Methods
This section describes the method signatures for system calls and upcalls in C, as an example of how they appear to application/userspace code.
Because C allows a single return value but Tock system calls can return multiple values, they do not easily map to idiomatic C. These low-level APIs are translated into standard C code by the userspace library. The general calling convention is that the complex return types are returned as structs. Since these structs are composite types larger than a single word, the ARM and RISC-V calling conventions pass them on the stack.
The system calls are implemented as inline assembly. This assembly moves arguments into the correct registers and invokes the system call, and on return copies the returned data into the return type on the stack.
5.1 Yield
The Yield system calls have these function prototypes:
int yield_no_wait(void);
void yield(void);
yield_no_wait returns 1 if an upcall was invoked and 0 if one was not invoked.
5.2 Subscribe
The subscribe system call has this function prototype:
typedef void (subscribe_upcall)(int, int, int, void*);
typedef struct {
bool success;
subscribe_upcall* upcall;
void* userdata;
tock_error_t error;
} subscribe_return_t;
subscribe_return_t subscribe(uint32_t driver, uint32_t subscribe,
subscribe_upcall uc, void* userdata);
The success field indicates whether the call to subscribe succeeded.
If it failed, the error code is stored in error. If it succeeded,
the value in error is undefined.
5.3 Command
The subscribe system call has this function prototype:
typedef struct {
syscall_rtype_t type;
uint32_t data[3];
} syscall_return_t;
syscall_return_t command(uint32_t driver, uint32_t command, int data, int arg2);
Because a command can return any failure or success variant, it returns a direct
mapping of the return registers. rtype contains the value of r0, while
data[0] contains what was passed in r1, data[1] contains was passed in r2,
and data[2] contains what was passed in r3.
5.4 Read-Write Allow
The read-write allow system call has this function prototype:
typedef struct {
bool success;
void* ptr;
size_t size;
tock_error_t error;
} allow_rw_return_t;
allow_rw_return_t allow_readwrite(uint32_t driver, uint32_t allow, void* ptr, size_t size);
The success field indicates whether the call succeeded.
If it failed, the error code is stored in error. If it succeeded,
the value in error is undefined. ptr and size contain the pointer
and size of the passed buffer.
5.5 Read-Only Allow
The read-only allow system call has this function prototype:
typedef struct {
bool success;
const void* ptr;
size_t size;
tock_error_t error;
} allow_ro_return_t;
allow_ro_return_t allow_readonly(uint32_t driver, uint32_t allow, const void* ptr, size_t size);
The success field indicates whether the call succeeded.
If it failed, the error code is stored in error. If it succeeded,
the value in error is undefined. ptr and size contain the pointer
and size of the passed buffer.
5.6 Memop
Because the Memop system calls are defined by the kernel and not extensible, they are directly defined by libtock-c as library functions:
void* tock_app_memory_begins_at(void);
void* tock_app_memory_ends_at(void);
void* tock_app_flash_begins_at(void);
void* tock_app_flash_ends_at(void);
void* tock_app_grant_begins_at(void);
int tock_app_number_writeable_flash_regions(void);
void* tock_app_writeable_flash_region_begins_at(int region_index);
void* tock_app_writeable_flash_region_ends_at(int region_index);
They wrap around an underlying function which uses inline assembly:
void* memop(uint32_t op_type, int arg1);
5.7 Exit
The Exit system calls have these function prototypes:
void tock_exit(uint32_t completion_code);
void tock_restart(uint32_t completion_code);
Since these two variants of Exit never return, they have no return value.
6 Authors' Address
Guillaume Endignoux <guillaumee@google.com>
Jon Flatley <jflat@google.com>
Philip Levis
414 Gates Hall
Stanford University
Stanford, CA 94305
Phone: +1 650 725 9046
Email: pal@cs.stanford.edu
Amit Levy <aalevy@cs.princeton.edu>
Pat Pannuto <ppannuto@ucsd.edu>
Leon Schuermann <leon@is.currently.online>
Johnathan Van Why <jrvanwhy@google.com>
7 References and Additional Information
Kernel Time HIL
TRD: 105
Working Group: Kernel
Type: Documentary
Status: Draft
Obsoletes: 101
Author: Guillaume Endignoux, Amit Levy, Philip Levis, and Jett Rink
Draft-Created: 2021/07/23
Draft-Modified: 2021/07/23
Draft-Version: 1.0
Draft-Discuss: Github PR
Abstract
This document describes the hardware independent layer interface (HIL) for time in the Tock operating system kernel. It describes the Rust traits and other definitions for this service as well as the reasoning behind them. This document is in full compliance with TRD1.
1 Introduction
Microcontrollers provide a variety of hardware controllers that keep track of time. The Tock kernel organizes these various types of controllers into two broad categories: alarms and timers. Alarms continuously increment a clock and can fire an event when the clock reaches a specific value. Timers can fire an event after a certain number of clock ticks have elapsed.
The time HIL is in the kernel crate, in module hil::time. It provides six
main traits:
kernel::hil::time::Time: provides an abstraction of a moment in time. It has two associated types. One describes the width and maximum value of a time value. The other specifies the frequency of the ticks of the time value.kernel::hil::time::Counter: derives fromTimeand provides an abstraction of a free-running counter that can be started or stopped. ACounter's moment in time is the current value of the counter.kernel::hil::time::Alarm: derives fromTime, and provides an abstraction of being able to receive a callback at a future moment in time.kernel::hil::time::Timer: derives fromTime, and provides an abstraction of being able to receive a callback at some amount of time in the future, or a series of callbacks at a given period.kernel::hil::time::OverflowClient: handles an overflow callback from aCounter.kernel::hil::time::AlarmClient: handles the callback from anAlarm.kernel::hil::time::TimerClient: handles the callback from aTimer.
In addition, to provide a level of minimal platform independence, a port of Tock to a given microcontoller is expected to implement certain instances of these traits. This allows, for example, system call capsules for alarm callbacks to work across boards and chips.
This document describes these traits, their semantics, and the instances that a Tock chip is expected to implement.
2 Time, Frequency, Ticks, and ConvertTicks traits
The Time trait represents a moment in time, which is obtained by
calling now.
The trait has two associated types. The first, Frequency, is an
implementation of the Frequency trait which describes how many ticks
there are in a second. The inverse of the frequency defines the time
interval between two ticks of time.
The second associated type, Ticks, defines the width of the time
value. This is an associated type because different microcontrollers
represent time with different bit widths: most Cortex-M
microcontrollers, for example, use 32 bits, while RISC-V uses 64 bits
and the Nordic nRF51822 provides only a 24-bit counter. The Ticks
associated type defines this, such that users of the Time trait can
know when wraparound will occur.
The Ticks trait requires several other traits from core::cmp: Ord,
PartialOrd, and Eq. This is so that methods such as min_by_key can
be used with Iterators for when examining a set of Ticks values.
The MuxAlarm structure in capsules::virtual_alarm does this, for example,
to find the next alarm that should fire.
#![allow(unused)] fn main() { pub trait Ticks: Clone + Copy + From<u32> + fmt::Debug + Ord + PartialOrd + Eq { fn into_usize(self) -> usize; fn into_u32(self) -> u32; fn wrapping_add(self, other: Self) -> Self; fn wrapping_sub(self, other: Self) -> Self; // Returns whether `self` is in the range of [`start`, `end`), using // unsigned arithmetic and considering wraparound. It returns true // if, incrementing from `start`, `self` will be reached before `end`. // Put another way, it returns `self - start < end - start` in // unsigned arithmetic. fn within_range(self, start: Self, end: Self); fn max_value() -> Self; /// Converts the specified val into this type if it fits, otherwise the /// `max_value()` is returned fn from_or_max(val: u64) -> Self; /// Scales the ticks by the specified numerator and denominator. If the /// resulting value would be greater than u32,`u32::MAX` is returned instead fn saturating_scale(self, numerator: u32, denominator: u32) -> u32; } pub trait Frequency { fn frequency() -> u32; // Represented in Hz } pub trait Time { type Frequency: Frequency; type Ticks: Ticks; fn now(&self) -> Self::Ticks; } pub trait ConvertTicks<T: Ticks> { /// Returns the number of ticks in the provided number of seconds, /// rounding down any fractions. If the value overflows Ticks, it /// returns `Ticks::max_value()`. fn ticks_from_seconds(&self, s: u32) -> T; /// Returns the number of ticks in the provided number of milliseconds, /// rounding down any fractions. If the value overflows Ticks, it /// returns `Ticks::max_value()`. fn ticks_from_ms(&self, ms: u32) -> T; /// Returns the number of ticks in the provided number of microseconds, /// rounding down any fractions. If the value overflows Ticks, it /// returns `Ticks::max_value()`. fn ticks_from_us(&self, us: u32) -> T; /// Returns the number of seconds in the provided number of ticks, /// rounding down any fractions. If the value overflows u32, `u32::MAX` /// is returned, fn ticks_to_seconds(&self, tick: T) -> u32; /// Returns the number of milliseconds in the provided number of ticks, /// rounding down any fractions. If the value overflows u32, `u32::MAX` /// is returned, fn ticks_to_ms(&self, tick: T) -> u32; /// Returns the number of microseconds in the provided number of ticks, /// rounding down any fractions. If the value overflows u32, `u32::MAX` /// is returned, fn ticks_to_us(&self, tick: T) -> u32; } }
Frequency is defined with an associated type
of the Time trait (Time::Frequencey). It MUST implement the
Frequency trait, which has a single method, frequency. frequency
returns the frequency in Hz, e.g. 1 MHz is 1000000. Clients can use this
to write code that is independent of the underlying frequency.
An instance of Time or derived trait MUST NOT have a Frequency
which is greater than its underlying frequency precision. It must be
able to accurately return every possible value in the range of Ticks
without further quantization. It is therefore not allowed to take a
32 kHz clock and present it as an instance of Time with a frequency
of Freq16MHz.
Frequency allows a user of Time to know the granularity of ticks
and so avoid quantization error when two different times map to the
same time tick. For example, if a user of Time needs microsecond
precision, then the associated type can be used to statically check
that it is not put on top of an implementation with 32 kHz precision.
The ConvertTicks trait is auto-implemented on any object that implements
the Time trait. This auto-implemented trait is provided for convenience to
help convert seconds, milliseconds, or microsecond to/from ticks. These
helper methods all round down the result. This means, for example, that
if the Time instance has a frequency of 32 kHz, calling
ticks_from_us(20) returns 0, because a single tick of a 32 kHz clock
is 30.5 microseconds.
3 Counter and OverflowClient traits
The Counter trait is the abstraction of a free-running counter that
can be started and stopped. This trait derives from the Time trait, so
it has associated Frequency and Tick types. The Counter trait
allows a client to register for callbacks when the counter overflows.
#![allow(unused)] fn main() { pub trait OverflowClient { fn overflow(&self); } pub trait Counter<'a>: Time { fn start(&self) -> Result<(), ErrorCode>; fn stop(&self) -> Result<(), ErrorCode>; fn reset(&self) -> Result<(), ErrorCode>; fn is_running(&self) -> bool; fn set_overflow_client(&self, &'a dyn OverflowClient); } }
The OverflowClient trait is separated from the AlarmClient trait
because there are cases when software simply wants a free-running
counter to keep track of time, but does not need triggers at a
particular time. For hardware that has a limited number of
compare registers, allocating one of them when the compare itself
isn't needed would be wasteful.
Note that Tock's concurrency model means interrupt bottom halves can be delayed until the current bottom half (or syscall invocation) completes. This means that an overflow callback can seem to occur after an overflow. For example, suppose there is an 8-bit counter. The following execution is possible:
- Client code calls Time::now, which returns 250.
- An overflow happens, marking an interrupt as pending but the bottom half doesn't execute yet.
- Client code calls Time::now, which returns 12.
- The main event loop runs, invoking the bottom half.
- The Counter calls OverflowClient::overflow, notifying the client of the overflow.
A Counter implementation MUST NOT provide a Frequency of a higher
resolution than an underlying hardware counter. For example, if the
underlying hardware counter has a frequency of 32 kHz, then a Counter
cannot say it has a frequency of 1MHz by multiplying the underlying
counter by 32. A Counter implementation MAY provide a Frequency of
a lower resolution (e.g., by stripping bits).
The reset method of Counter resets the counter to 0.
4 Alarm and AlarmClient traits
Instances of the Alarm trait track an incrementing clock and can
trigger callbacks when the clock reaches a specific value as well as
when it overflows. The trait is derived from Time trait and
therefore has associated Time::Frequency and Ticks types.
The AlarmClient trait handles callbacks from an instance of Alarm.
The trait derives from OverflowClient and adds an additional callback
denoting that the time specified to the Alarm has been reached.
Alarm and Timer (presented below) differ in their level of
abstraction. An Alarm presents the abstraction of receiving a
callback when a point in time is reached or on an overflow. In
contrast, Timer allows one to request callbacks at some interval in
the future, either once or periodically. Alarm requests a callback
at an absolute moment while Timer requests a callback at a point
relative to now.
#![allow(unused)] fn main() { pub trait AlarmClient { fn alarm(&self); } pub trait Alarm: Time { fn set_alarm(&self, reference: Self::Ticks, dt: Self::Ticks); fn get_alarm(&self) -> Self::Ticks; fn disarm(&self) -> Result<(), ErrorCode>; fn set_alarm_client(&self, client: &'a dyn AlarmClient); } }
Alarm has a disable in order to cancel an existing alarm. Calling
set_alarm enables an alarm. If there is currently no alarm set, this
sets a new alarm. If there is an alarm set, calling set_alarm cancels
the previous alarm and replaces the it with the new one. It cancels the
previous alarm so a client does not have to disambiguate which alarm it
is handling, the previous or current one.
The reference parameter of set_alarm is typically a sample of
Time::now just before set_alarm is called, but it can also be a
stored value from a previous call. The reference parameter follows
the invariant that it is in the past: its value is by definition equal
to or less than a call to Time::now.
The set_alarm method takes a reference and a dt parameter to
handle edge cases in which it can be impossible distinguish between
alarms for the very near past and alarms for the very far future. The
edge case occurs when the underlying counter increments past the
compare value between when the call was made and the compare register
is actually set. Because the counter has moved past the intended
compare value, it will have to wrap around before the alarm will
fire. However, one cannot assume that the counter has moved past the
intended compare and issue a callback: the software may have requested
an alarm very far in the future, close to the width of the counter.
Having a reference and dt parameters disambiguates these two
cases. Suppose the current counter value is current. If current
is not within the range [reference, reference + dt) (considering
unsigned wraparound), then this means the requested firing time has
passed and the callback should be issued immediately (e.g., with a
deferred procedure call, or setting the alarm very short in the
future).
5 Timer and TimerClient traits
The Timer trait presents the abstraction of a timer. The
timer can either be one-shot or periodic with a fixed
interval. Timer derives from Time, therefore has associated
Time::Frequency and Ticks types.
The TimerClient trait handles callbacks from an instance of Timer.
The trait has a single callback, denoting that the timer has fired.
#![allow(unused)] fn main() { pub trait TimerClient { fn timer(&self); } pub trait Timer<'a>: Time { fn set_timer_client(&self, &'a dyn TimerClient); fn oneshot(&self, interval: Self::Ticks) -> Self::Ticks; fn repeating(&self, interval: Self::Ticks) -> Self::Ticks; fn interval(&self) -> Option<Self::Ticks>; fn is_oneshot(&self) -> bool; fn is_repeating(&self) -> bool; fn time_remaining(&self) -> Option<Self::Ticks>; fn is_enabled(&self) -> bool; fn cancel(&self) -> Result<(), ErrorCode>; } }
The oneshot method causes the timer to issue the TimerClient's
fired method exactly once when interval clock ticks have elapsed.
Calling oneshot MUST invalidate and replace any previous calls to
oneshot or repeating. The method returns the actual number of
ticks in the future that the callback will execute. This value MAY be
greater than interval to prevent certain timer race conditions
(e.g., that require a compare be set at least N ticks in the future)
but MUST NOT be less than interval.
The repeating method causes the timer to call the Client's fired
method periodically, every interval clock ticks. Calling oneshot
MUST invalidate and replace any previous calls to oneshot or
repeat. The method returns the actual number of ticks in the future
that the first callback will execute. This value MAY be greater than
interval to prevent certain timer race conditions (e.g., that
require a compare be set at least N ticks in the future) but MUST NOT
be less than interval.
6 Frequency and Ticks Implementations
The time HIL provides four standard implementations of Frequency:
#![allow(unused)] fn main() { pub struct Freq16MHz; pub struct Freq1MHz; pub struct Freq32KHz; pub struct Freq16KHz; pub struct Freq1KHz; }
The time HIL provides three standard implementaitons of Ticks:
#![allow(unused)] fn main() { pub struct Ticks24Bits(u32); pub struct Ticks32Bits(u32); pub struct Ticks64Bits(u64); }
The 24 bits implementation is to support some Nordic Semiconductor nRF platforms (e.g. nRF52840) that only support a 24-bit counter.
7 Capsules
The Tock kernel provides three standard capsules:
capsules::alarm::AlarmDriverprovides a system call driver for anAlarm.capsules::virtual_alarmprovides a set of abstractions for virtualizing a singleAlarminto many.capsules::virtual_timerprovides a set of abstractions for virtualizing a singleAlarminto manyTimerinstances.
8 Required Modules
A chip MUST provide an instance of Alarm with a Frequency of Freq32KHz
and a Ticks of Ticks32Bits.
A chip MUST provide an instance of Time with a Frequency of Freq32KHz and
a Ticks of Ticks64Bits.
A chip SHOULD provide an Alarm with a Frequency of Freq1MHz and a Ticks
of Ticks32Bits.
9 Implementation Considerations
This section describes implementation considerations for hardware implementations.
The trickiest aspects of implementing the traits in this document relate
to the Alarm trait and the semantics of how and when callbacks
are triggered. In particular, if set_alarm indicates a time that has
already passed, then the implementation should adjust it so that it
will trigger very soon (rather than wait for a wrap-around).
This is complicated by the fact that as the code is executing, the underlying counter continues to tick. Therefore an implementation must also be careful that this "very soon" time does not fall into the past. Furthermore, many instances of timer hardware requires that a compare value be some minimum number of ticks in the future. In practice, this means setting "very soon" to be a safe number of ticks in the future is a better implementation approach than trying to be extremely precise and inadvertently choosing too soon and then waiting for a wraparound.
Pseudocode to handle these cases is as follows:
set_alarm(self, reference, dt):
now = now()
expires = reference.wrapping_add(dt)
if !now.within_range(reference, expired):
expires = now
if expires.wrapping_sub(now) < MIN_DELAY:
expires = now.wrapping_add(MIN_DELAY)
clear_alarm()
set_compare(expires)
enable_alarm()
10 Acknowledgements
The traits and abstractions in this document draw from contributions and ideas from Patrick Mooney and Guillaume Endignoux as well as others.
11 Modification After TRD 101
This TRD obsoletes TRD 101, and the changes include:
- The
tick_from_helper methods moved fromTimetrait toConvertTickstrait- This allow downstream clients to use trait objects (i.e.
dyn) with theTime,Alarm, andTimertraits. Even though it is possible to use trait objects withTimeand sub traits, it is still beneficial to use generic parameters when there is only a single concrete type.
- This allow downstream clients to use trait objects (i.e.
- Added
ticks_to_helper methods onConvertTicks - Added a few more support methods on
Tickstrait.
12 Authors' Address
Amit Levy
amit@amitlevy.com
Philip Levis
409 Gates Hall
Stanford University
Stanford, CA 94305
USA
pal@cs.stanford.edu
Guillaume Endignoux
guillaumee@google.com
Jett Rink
jettrink@google.com
Application Completion Codes
TRD: 106
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Alyssa Haroldsen
Draft-Created: December 6, 2021
Draft-Modified: January 25, 2022
Draft-Version: 1
Draft-Discuss: devel@lists.tockos.org
Abstract
This advisory document describes the expected behavior of application completion
codes when terminating via the exit syscall, as described in
TRD 104.
1 Introduction
When an application exits via the exit syscall, it can specify
a completion code, an unsigned 32-bit number which indicates status. This
information can be stored in the kernel and used in management or policy
decisions.
This number is called an "exit status", "exit code", or "result code" on other platforms.
2 Design Considerations
When possible, Tock applications should follow existing conventions and terminology from other major platforms. This assists in helping the project be more understandable to newcomers by following the principle of least astonishment.
This advisory document provides guidance for the ecosystem of Tock applications
using the exit syscall, and does not define the behavior of the syscall
itself.
3 Design
A completion code of 0 passed to the exit syscall MUST indicate normal app
termination. A non-zero completion code SHOULD be used to indicate abnormal
termination. This distinction is useful so that a Tock kernel can handle
success/failure cases differently, e.g. by printing error messages,
and so that kernel extensions (such as process exit handlers defined by a board)
or external tools (such as a tool designed to parse the output from a kernel
with trace_syscalls enabled) can match on these two cases.
This behavior also matches the convention for Unix exit codes, such that it
likely matches the expectations for users coming from that domain.
A completion code between 1 and 1024 inclusive SHOULD be the
same value as one of the error codes specified in TRD 104.
This requirement is a SHOULD rather than a MUST because it is useful in the
common case (it allows software to infer something about the cause of an
error that led to an exit, and possibly print a useful message) but also
allows a process to do something else if needed (e.g. for compatibility
with some other standard of exit codes).
Accordingly, the core kernel MUST NOT assume any semantic meaning for completion codes or take actions based on their values besides printing error messages unless
-
there is a specification of a particular application's completion code space written in a TRD, and
-
the kernel can reliably identify that application and associate it with this specification. While there are common and conventional uses of certain values, applications are not required to follow these and may assign their own semantic meanings to values.
| Completion Code | Meaning |
|---|---|
| 0 | Success |
| 1-1024 | SHOULD be a TRD 104 error code |
1025-u32::MAX | Not defined |
4 Implementation
As of writing, libtock currently implements this TRD via the
Termination trait.
#![allow(unused)] fn main() { pub trait Termination { fn complete<S: Syscalls>(self) -> !; } impl Termination for () { fn complete<S: Syscalls>(self) -> ! { S::exit_terminate(0) } } impl Termination for Result<(), ErrorCode> { fn complete<S: Syscalls>(self) -> ! { let exit_code = match self { Ok(()) => 0, Err(ec) => ec as u32, }; S::exit_terminate(exit_code); } } }
5 Author's Address
Alyssa Haroldsen <kupiakos@google.com>
Hudson Ayers <hayers@stanford.edu>
Draft TRDs
These TRDs have not been finalized.
Application IDs (AppID), Credentials, and Process Loading
TRD:
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Philip Levis, Johnathan Van Why
Draft-Created: 2021/09/01
Draft-Modified: 2022/10/14
Draft-Version: 10
Draft-Discuss: devel@lists.tockos.org
Abstract
This document describes the design and implementation of application identifiers (AppIDs) in the Tock operating system. AppIDs provide a mechanism to identify the application contained in a userspace binary that is distinct from a process identifier. AppIDs allow the kernel to apply security policies to applications as their code evolves and their binaries change. A board defines how the kernel verifies AppIDs and which AppIDs the kernel will load. This document describes the Rust traits and software architecture for AppIDs as well as the reasoning behind them. This document is in full compliance with TRD1.
1 Introduction
The Tock kernel needs to be able to manage and restrict what userspace applications can do. Examples include:
- making sure other applications cannot access an application's sensitive data stored in non-volatile memory,
- restricting certain system calls to be used only by trusted applications,
- run and load only applications that a trusted third party has signed.
In order to accomplish this, the kernel needs a way to identify an application and know whether a particular userspace binary belongs to an application. Multiple binaries can be associated with a single application. For example, software updates may cause a system to have more than one version of an application, such that it can roll back to the old version if there is a problem with the new one. In this case, there are two different userspace binaries, both associated with the same application.
To remain flexible and support many use cases, the Tock kernel makes minimal assumptions on the structure and form of application credentials and corresponding application identifiers. Application credentials are arbitrary k-byte sequences that are stored in a userspace binary's Tock binary format (TBF) footers. Before a process is eligible to execute, a Tock board uses an AppID (application identifier) checker to determine the AppIDs of each userspace binary available on the board and decide whether to load the binary into a process.
The Tock kernel ensures that each running process has a unique application identifier; if two userspace binaries have the same AppID, the kernel will only permit one of them to run at any time.
Most of the complications in AppIDs stem from the fact that they are a general mechanism used for many different use cases. Therefore, the exact structure and semantics of application credentials can vary widely. Tock's TBF footer formats, kernel interfaces and mechanisms must accommodate this wide range.
The interfaces and standard implementations for AppIDs and AppID
checkers are in the kernel crate, in the module
process_checker. There are three main traits:
-
kernel::process_checker::AppCredentialsPolicyis responsible for defining which types of application credentials the kernel accepts and whether it accepts a particular application credential for a specific application binary. The kernel only loads userspace programs that theAppCredentialsPolicyaccepts. -
kernel::process_checker::AppUniquenesscompares the application identifiers of two processes and reports whether they differ. The kernel uses this trait to ensure that each running process has a unique application identifier. -
kernel::process_checker::Compresscompresses application identifiers into short, 32-bit identifiers calledShortIds.ShortIds provide a mechanism for fast comparison, e.g., for an application identifier against an access control list.
Example implementations can be found in
kernel::process_checker::basic.
In normal use of Tock, a software tool running on a host copies TBF Objects into an application flash region. When the Tock kernel boots, it scans this application flash region for TBF Objects. After inspecting the Userspace Binary, TBF headers, and TBF Footers in a TBF Object, the kernel assigns it an Application Identifier and decides whether to run it.
2 Terminology
This document uses several terms in precise ways. Because these terms overlap somewhat with general terminology in the Tock kernel, this section defines them for clarity. The Tock kernel often uses the term "application" to refer to what this document calls an "Application Binary."
Userspace Binary: a code image compiled to run in a Tock process, consisting of text, data, read-only data, and other segments.
TBF Object: a Tock binary format object stored on a Tock
device, containing TBF headers, a Userspace Binary, and TBF footers.
TBF Objects are typically generated from ELF files using the
elf2tab tool and are the
standard binary format for Tock userspace processes.
Application: userspace software developed and maintained by an individual, group, corporation, or organization that meets the requirements of a Tock device use case. An Application can have multiple Userspace Binaries, e.g., to support versioning.
Application Identifier: a numerical identifier for an application. Each loaded process has a single Application Identifier. Application Identifiers are not unique across loaded processes: multiple loaded processes can share the same application identifier. Application Identifiers, however, are unique across running processes. If multiple loaded processes share the same Application Identifier, at most one of them can run at any time. An Application Identifier can be persistent across boots or restarts of a userspace binary. The Tock kernel assigns Application Identifiers to processes using a Identifier Policy.
Application Credentials: metadata that establish integrity of a Userspace Binary. Application Credentials are usually stored in Tock Binary Format footers. A TBF object can have multiple Application Credentials.
Process Checker: the component of the Tock kernel which is responsible for validating Application Credentials and determining which Application Credential (if any) the kernel should apply to a process.
Identifier Policy: the algorithm that the Process Checker uses to assign Application Identifiers to processes. An Identifier Policy defines an Application Identifier space.
Credentials Checking Policy: the algorithm that the Process Checker uses to decide how Tock responds to particular Application Credentials. The boot sequence typically passes the Credentials Checking Policy to the Process Checker to use when loading processes.
Global Application Identifier: an Application Identifier which, given an expected combination of Credentials Checking Policy and Identifier Policy, is both globally consistent across all TBF objects for a particular Application and unique to that Application. All instances of the Application loaded with this combination of policies have this Application Identifier. No instances of other Applications loaded with this Credentials Checking Policy have this Application Identifier. One example of a Global Application Identifier is a public key used to verify the digital signature of every TBF Object of a single Application. Another example of a Global Application Identifier is a string name stored in a TBF Object header; in this case the party installing TBF Objects needs to make sure there are no unintended collisions between these string names.
Locally Unique Application Identifier: a special kind of Application Identifier that is by definition unique from all other Application Identifiers. Locally Unique Application Identifiers do not have a concrete value that can be examined or stored. All tests for equality with a Locally Unique Application Identifier return false. Locally Unique Application Identifiers exist in part to be an easy way to indicate that a process has no special privileges and its identity is irrelevant from a security standpoint.
Short ID: a 32-bit compressed representation of an Application Identifier. Application Identifiers can be large (e.g., an RSA key) or expensive to compare (a string name); Short IDs exist as a way for an Identifier Policy to map Application Identifiers to a small identifier space in order to improve both the space and time costs of checking identity.
3 Application Identifiers and Application Credentials
Application Identifiers and Application Credentials are related but they are not the same thing. An Application Identifier is a numerical representation of the Application's identity. Application Credentials are data that, combined with an Identifier Policy, can cryptographically bind an Application Identifier to a process.
For example, suppose there are two versions (v1.1 and v1.2) of the same Application. They have different Userspace Binaries. Each version has an Application Credentials consisting of a signature over the TBF headers and Userspace Binary, signed by a known public key. The Identifier Policy is that the public key defines the Application Identifier: all versions of this Application have Application Credentials signed by this key. The two versions have different Application Credentials, because their hashes differ, but they have the same Application Identifier.
3.1 Application Identifiers
The key restriction Application Identifiers impose is that the kernel MUST NOT simultaneously run two processes that have the same Application Identifier. This restriction is because an Application Identifier provides an identity for a Userspace Binary. Two processes with the same Application Identifier are two copies or versions of the same Application. As Application Identifiers are used to control access to resources such as storage, this restriction ensures there is at most one process accessing resources or data belonging to an Application Identifier, which precludes the need for consistency mechanisms for concurrent access.
Application Identifiers can be used for security policy decisions in the rest of the kernel. For example, a kernel may allow only Applications whose Application Credentials use a particular trusted public key to access restricted functionality, but restrict other applications to use a subset of available system calls. By defining the Application Identifier of a process to be the public key, the system can map this key to a Short ID (described below) that gives access to restricted functionality.
The Tock kernel assigns each Tock process a unique process identifier, which can be re-used over time (like POSIX process identifiers). These process identifiers are separate from and unrelated to Application Identifiers. An Application Identifier identifies an Application, while a process identifier identifies a particular execution of a binary. For example, if a Userspace Binary exits and runs a second time, the second execution will have the same Application Identifier but may have a different process identifier.
3.1.1 Global Application Identifiers
Global Application Identifiers are a class of Application Identifiers that have properties which make them useful for security policies. For Applications that use Global Application Identifiers, the combination of the Application Credentials put in TBF Objects, Credentials Checking Policy, and Identifier Policy establish a one-to-one mapping between Applications and Global Application Identifiers. If an Application has a Global Application Identifier, then every process running that Application has that Global Application Identifier. Conversely, that Global Application Identifier is unique to that Application; two Applications do not share a Global Application Identifier.
One important implication of this mapping is that Global Application Identifiers MUST persist across process restarts or reloads.
Poor management of Global Application Identifiers can lead to unintended collisions. For example, an Identifier Policy might define the Global Application Identifier of processes to be the public key of a key pair to sign an Application Credential. If a developer accidentally uses the wrong key to sign a Userspace Binary, the Tock kernel will think that Userspace Binary is a different Application. Similarly, if the Identifier Policy uses a string name in a TBF Object header as the Global Application Identifier, then incorrectly giving two different programs the same name could lead them to sharing data.
3.1.2 The "Locally Unique" Identifier
Some Tock use cases do not require a real notion of Application identity. In many research or prototype systems, for example, every Userspace Binary has complete access to the system and there is no need for persistent storage or identity. Running processes need an Application Identifier, but in these cases it is not necessary for a Tock kernel and Application build system to manage Global Application Identifiers.
In such use cases, the Identifier Policy can assign a special Application Identifier called the "Locally Unique Identifier". This identifier does not have a concrete value: it is simply a value that is by definition different from all other Application Identifiers. Because it does not have a concrete value, one cannot test for equality with Locally Unique Application Identifier. All comparisons with a Locally Unique Application Identifier return false.
3.2 Application Credentials
Application Credentials are information stored in TBF Footers. The exact format and information of Application Credentials are described in the next section. They typically store cryptographic information that establishes the Application a Userspace Binary belongs to as well as provide integrity.
Application Identifiers can, but do not have to be, be derived from Application Credentials. For example, a Tock system with a permissive Credentials Checking Policy may allow processes with no Application Credentials to run, and have an Identifier Policy that defines Application Identifiers to be the ASCII name stored in a TBF header.
In cases when a TBF Object does not have any Application Credentials, the Identifier Policy MAY assign it a Global Application Identifier. This identifier must follow all of the requirements in Section 3.1.1.
3.3 Example Use Cases
The following five use cases demonstrate different ways in which Application Policies can assign Application Identifiers, some of which use Application Credentials:
-
A research system that (memory permitting) runs every Userspace Binary loaded on it. The Identifier Policy assigns every Userspace Binary a Locally Unique Application Identifier and the Credentials Checking Policy approves TBF Objects independently of their credentials.
-
A system which runs only a small number of pre-defined Applications and an Application is defined by a particular public RSA key. The Credentials Checking Policy only accepts TBF Objects with an Application Credentials containing an RSA signature from a small number of pre-approved keys. The Identifier Policies defines that the Global Application Identifier of a process is the public key used to generate the accepted Application Credentials for the TBF Object. Before verifying a signature in a TBF footer, the Process Checker decides whether to it accepts the associated public key using the Credentials Checking Policy. The Identifier Policy assigns a Global Application Identifier as the public key in the TBF footer.
-
A system which runs any number of Applications but all Applications must be signed by a particular RSA key. The Credentials Checking Policy only accepts TBF Objects with a Credentials of an RSA signature from the approved key. The Identifier Policy defines the Application Identifier as the UTF-8 encoded package name stored in the TBF Header (or "" if none is stored). Two Userspace Binaries with the same package name will not run concurrently.
-
A system that loads the same Userspace Binary in multiple different processes at the same time. The Identifier Policy assigns a Userspace Binary a Locally Unique Identifier. If the Userspace Binary needs integrity or authenticity then the Credentials Checking Policy can require signatures. This differs from the first example in that a single Userspace Binary can be loaded into multiple processes, instead of loading each Userspace Binary once. The use cases are different but can (in terms of identifiers and credentials) implemented the same way.
As the above examples illustrate, Application Credentials can vary in size and content. The credentials that a kernel's Credentials Checking Policy will accept depends on its use case. Certain devices might only accept Application Credentials which include a particular public key, while others will accept many. Furthermore, the internal format of these credentials can vary. Finally, the cryptography used in credentials can vary, either due to security policies or certification requirements.
Because the Identifier Policy is responsible for assigning Application Identifiers to processes, it is possible for the same Userspace Binary to have different Application Identifiers on different Tock systems. For example, suppose a TBF Object has two Application Credentials TBF footers: one signs with a key A, and the other with key B. Tock systems using a Credentials Checking Policy that accepts key A may use A as the Global Application Identifier, while Tock systems using a different policy that accepts key B may use B as the Global Application Identifier.
4 Process Loading
Tock defines its process loading algorithm in order to provide deterministic behavior in the presence of colliding Application Identifiers. This algorithm is designed to protect against downgrade attacks and misconfiguration.
The process loading operation consists of three stages:
-
When it boots, the Tock kernel scans for a TBF Object stored in its application flash region. While parsing the TBF Object, the kernel checks that the TBF Object is valid and can run on the system (e.g., do not require a newer kernel version).
-
After finding a valid and suitable TBF Object, the kernel checks the credentials of the TBF Object. Using the provided Credentials Checking Policy (described in Section 6), it decides whether the process has permission to run. If the TBF Object is allowed to run, the kernel loads the process binary into a slot in the process binaries array.
-
Each process in the process binaries array is runnable in terms of its credentials. However, at any given time it might not be allowed to run because its Application Identifier or Short ID conflicts with another process. The kernel scans the array of process binaries and determines whether to run the process based on its Application Identifier, Short ID, and the Application Binary version number (stored in the Program Header, described in Section 5.1). At boot, the kernel starts a process if either of:
- The process has a unique Application Identifier and Short ID,
- The process has a higher Application Binary version number than all processes it shares its Application Identifier or Short ID with,
If two processes which share a Short ID or Application ID have the same version number, the kernel starts one of them. The one which starts is the first one discovered in the process binaries array.
Once a process is determined to be runnable based on credentials and uniqueness, the process is loaded into a slot in the processes array. At this point the process will be run.
Once a Tock system is running, management interfaces may change the set of running processes from those which the boot sequence selected. E.g., the process console might terminate a process so that it can run a different process with the same Short ID and a lower Userspace Binary version number (rollback). The kernel maintains that a running process has a unique Application Identifier and a unique Short ID among running processes.
5 Credentials and Version in Tock Binary Format Objects
This section describes the format and semantics of Program Headers and Credentials Footers.
Application Credentials are usually stored in a TBF Object, along with
the Userspace Binary they are associated with. They are usually stored
as footers (after the TBF header and Userspace Binary) to simplify
computing integrity values such as checksums or hashes. This requires
that TBF Objects
have a TBF header that specifies where the application binary ends and
the footers begin, information which the TbfHeaderV2Main header (the
Main Header) does not include. Including Application Credentials in a
TBF Object therefore requires using an alternative
TbfHeaderV2Program header (the Program Header), which specifics
where footers begin.
The Tock process loading algorithm uses version numbers when deciding the which processes with the same Application Identifier to run. Version numbers are stored in a TBF Object in the Version field of a TBF Program Header.
5.1 Program Header
The Program Header is similar to the Main Header, in that it specifies
the offset of the entry function of the executable and memory
parameters. It adds one field, binary_end_offset, which indicates
the offset at which the Userspace Binary ends within the TBF
object. The space between this offset and the end of the TBF object is
reserved for footers.
This is the format of a Program Header:
0 2 4 6 8
+-------------+-------------+---------------------------+
| Type (9) | Length (16) | init_fn_offset |
+-------------+-------------+---------------------------+
| protected_size | min_ram_size |
+---------------------------+---------------------------+
| binary_end_offset | version |
+---------------------------+---------------------------+
It is represented in the Tock kernel with this Rust structure:
#![allow(unused)] fn main() { pub struct TbfHeaderV2Program { init_fn_offset: u32, protected_size: u32, minimum_ram_size: u32, binary_end_offset: u32, version: u32, } }
A TBF object MUST NOT have more than one Program Header. If a TBF Object has both a Program Header and a Main Header, the kernel's policy decides which is used. For example, older kernels that do not understand a Program Header may use the Main Header, while newer kernels may choose the Program Header.
5.2 Credentials Footer
To support credentials, the Tock Binary Format has a
TbfFooterV2Credentials TLV. This TLV is variable length and has two
fields, a 32-bit value specifying the format of the credentials and
a variable length data field. The format field defines the format
and size of the data field. Each value of the format field except
Reserved MUST have a fixed data size and format. This is the format
of a Credentials Footer:
0 2 4 8
+-------------+-------------+---------------------------+
| Type (128) | Length | format |
+-------------+-------------+---------------------------+
| data |
+-------------+--------...--+
It is represented in the Tock kernel with this structure:
#![allow(unused)] fn main() { pub struct TbfFooterV2Credentials { format: TbfFooterV2CredentialsType, data: &[u8], } }
Which types of credentials a Credentials Checking Policy supports are
kernel-specific. For example, an application that only accepts TBF
Objects signed with a particular 4096-bit RSA key can support only
those credentials, while an open research system might support
no credentials. Because the length field specifies the length of a
given credentials, not understanding a particular credentials type
does not prevent parsing others.
5.3 Integrity Region
TbfFooterV2Credentials follow the compiled app binary in a TBF
object. If a TbfFooterV2Credentials footer includes a cryptographic
hash, signature, or other value to check the integrity of a process
binary, this value MUST be computed over the TBF Header and Userspace
Binary, from the start of the TBF object until
binary_end_offset.
This region is called the integrity region.
Computing an integrity value in a Credentials
Footer MUST NOT include the contents of Footers. If new metadata
associated with an application binary needs to be covered by
integrity, it MUST be a Header. If new metadata associated with an
application binary needs to not be covered by integrity, it MUST be a
Footer.
The integrity region is from the end of the TBF Header to the
location indicated by the binary_end_offset field in the Program
Header. The size of the integrity region slice is therefore equal to
binary_end_offset.
6 Credentials Checking Policy: the AppCredentialsPolicy trait
The AppCredentialsPolicy trait defines the interface that implements
the Credentials Checking Policy of the Process Checker: it accepts,
passes on, or rejects Application Credentials. When a Tock board asks
the kernel to load processes, it passes a reference to a
AppCredentialsPolicy, which the kernel uses to check credentials.
An implementer of AppCredentialsPolicy sets the security policy of
Userspace Binary loading by deciding which types of credentials, and
which credentials, are acceptable and which are rejected.
#![allow(unused)] fn main() { pub enum CheckResult { Accept(Option<usize>), Pass, Reject } pub trait Client<'a> { fn check_done(&self, result: Result<CheckResult, ErrorCode>, credentials: TbfFooterV2Credentials, integrity_region: &'a [u8]); } pub trait AppCredentialsPolicy<'a> { fn set_client(&self, client: &'a dyn Client<'a>); fn require_credentials(&self) -> bool; fn check_credentials(&self, credentials: TbfFooterV2Credentials, integrity_region: &'a [u8]) -> Result<(), (ErrorCode, TbfFooterV2Credentials, &'a [u8])>; } }
If the kernel has been instructed to check credentials of Userspace Binaries, after it successfully parses a Userspace Binary it checks the credentials of the process binary.
To check the integrity of a process, the kernel scans the footers in
order, starting at the beginning of that process's footer region. At
each TbfFooterV2Credentials footer it encounters, the kernel calls
check_credentials on the provided AppCredentialsPolicy. If
check_credentials returns CheckResult::Accept, the kernel stops processing
credentials and stores the process binary in the process binaries array.
When an AppCredentialsPolicy accepts a credential it may include an opaque
usize value. This will be stored along with the accepted credential
and allows the AppCredentialsPolicy to share information about the accepted
credential. For example, if AppCredentialsPolicy is checking signatures, the
opaque value may communicate the owner of the private key that validated the
signature. This information may be useful when assigning ShortIds.
If the
AppCredentialsPolicy returns CheckResult::Reject, the kernel stops processing
credentials and does not load the process binary.
If the AppCredentialsPolicy returns CheckResult::Pass, the kernel tries the
next TbfFooterV2Credentials, if there is one. If the kernel reaches
the end of the TBF Footers (or if there is a Main Header and so no
Footers) without encountering a Reject or Accept result, it calls
require_credentials to ask the AppCredentialsPolicy what the
default behavior is. If require_credentials returns true, the
kernel does not load the process binary.
If require_credentials returns
false, the kernel loads the process binary into the process binaries array.
If a process binary
has no TbfFooterV2Credentials footers then there will be no Accept
or Reject results and require_credentials defines whether the
Userspace Binary is runnable.
The binary argument to check_credentials is a reference to
the integrity region of
the process binary.
7 Identifier Policy: the AppUniqueness trait
The AppUniqueness trait defines the API the Process Checker provides
to decide whether two processes have the same Application Identifier
or Short ID. An implementer of AppUniqueness implements the
different_identifier method, which performs a pairwise comparison of
two processes.
#![allow(unused)] fn main() { trait AppUniqueness { // Returns true if the two processes have different application // identifiers. fn different_identifier(&self, processA: &ProcessBinary, processB: &ProcessBinary) -> bool; fn different_identifier_process(&self, processA: &ProcessBinary, processB: &dyn Process) -> bool; fn different_identifier_processes(&self, processA: &dyn Process, processB: &dyn Process) -> bool; } }
This interfaces encapsulate the methods by which a module assigns or
calculates application identifiers. As process binaries must be compared
to both other process binaries and already loaded processes, there are
two version of the different_identifier method to support both cases.
8 Short IDs and the Compress trait
While TbfFooterV2Credentials often define the identity and
credentials of an application, they are large data structures that are
too large to store in RAM. When parts of the kernel wish to apply
security or access policies based on Application Identifiers, they
need a concise way to represent these identifiers. Requiring policies
to be encoded in terms of raw Application Identifiers can be extremely
costly: a table, for example, that says that only Applications signed
with a particular 4096-bit RSA key can access certain system calls
requires storing the whole 4096-bit key. If there are multiple such
security policies through the kernel, they must each store this
information.
The Compress trait provides a mechanism to map an Application
Identifier to a small (32-bit) integer called a Short ID. Short IDs
can be used throughout the kernel as an identifier of an Application.
For example, suppose that a device wants to grant access to all
Userspace Binaries signed by a certain 3072-bit RSA key K and has no
other security policies. The Credentials Checking Policy only accepts
3072-bit RSA credentials with key K. The Compress trait
implementation assigns a Short ID based on a string match with the
process package name, with certain names receiving particular Short
IDs. Access control systems within the kernel can define their
policies in terms of these identifiers, such that they can check
access by comparing 32-bit integers rather than 384-byte keys.
Short IDs support the concept of a "Locally Unique" identifier by
having a special LocallyUnique value. All tests for equality with
ShortId::LocallyUnique return false.
8.1 Short ID Properties and Examples
Given a particular combination of deterministic Identifier Policy and Credentials Checking Policy, Short IDs have two requirements. They
- MUST be unique across running processes,
- MUST be consistent across all running instances of an Application on Tock systems.
Short IDs are locally unique for three reasons. First, it simplifies process management and naming: a particular Short ID uniquely identifies a running process. Second, it ensures that resources bound to an application identifier (such as non-volatile storage) do not have to handle concurrent accesses from multiple processes. Finally, generally one does not want two copies of the same Application running: they can create conflicting responses and behaviors.
These two requirements restrict the set of possible combinations of Credentials Checking Policy and Identifier Policy. For example, a Short ID cannot be an incrementing counter; it must be deterministically derived from the Application Identifier.
A basic challenge that arises with Short IDs is that they are a form of compression. In the ideal case, Short IDs would have two additional properties:
- Different Application Identifiers map to different Short IDs, and
- All Application Identifiers have a concrete Short ID that identifies the Application.
Unfortunately, it is not possible to satisfy both of these properties simultaneously. This is because Short IDs potentially compress Application Identifiers. Consider, for example, a system where the Application Identifier is the public key in an 4096-bit RSA credential. Short IDs are 32 bits, but there are more than 2^32 4096-bit RSA keys. If every RSA key receives a different Short ID, and that Short ID is always the same, after 2^32 keys the Short ID space is exhausted.
Every algorithm to map Application Identifiers to Short IDs therefore sacrifices one of these two properties:
- Different Application Identifiers can map to the same Short ID: An Identifier Policy with this property is one that uses string names as Global Application Identifiers and calculates the Short ID of process to be the checksum (or hash) of the string name. Two different names can checksum or hash to the same value. These collisions, however, can be acceptable if a developer is willing to pick string names that do not collide or change them when they do. A research or prototyping system might use this Identifier Policy.
- Some Application Identifiers do not receive concrete Short IDs: An Identifier Policy with this property is one that uses public keys in signature credentials as Application Identifiers and has a set of public keys it knows and trust. It maps these known keys to a small set of Short IDs (e.g., 1 through N). The system may run Userspace Binaries signed by other keys, but assigns them a Locally Unique Application identifier, which results in a Locally Unique Short ID.
8.2 Example Short ID use cases
Here are three example use cases of Short IDs.
8.2.1 Use Case 1: Anonymous Applications
There are many Tock systems that do not particularly care about the identity of Applications. They do not have security policies, or track Application Identifiers. A prototyping system whose Credentials Checking Policy accepts all TBF Objects regardless of Application Credentials is an example of such a system. At boot, it scans the set of TBF Objects in application flash, trying to load and run each one until it runs out of resources (RAM, process slots). Applications cannot store data they expect to persist across reboots. Because the Tock kernel does not care about the identity of Applications, it has no security policies for limiting access to functionality or resources (e.g., system call filters).
In this use case, the Credentials Checking Policy accepts all correctly formatted TBF Objects and the Identifier Policy assigns every process a Locally Unique Identifier and a Locally Unique Short ID.
8.2.2 Use Case 2: U2F Application
In this use case, Tock needs to run a Universal 2nd Factor Authentication (U2F) application. This Application needs to store a private key in flash. No other Application should be able to access this key. The Tock kernel also restricts certain system calls to only the U2F Application, such as invoking cryptographic accelerators. Finally, the U2F Application needs a consistent identity over reboots of its Userspace Binary, the kernel, and upgrades of the Application with new versions (and Userspace Binaries).
In this use case, the Application Identifier is a Global Identifier. To establish the authenticity and integrity of the U2F Application, the Credential Checking Policy requires that an Application has a valid 4096-bit RSA credential. The system assumes that each Application has its own public-private key pair. While the system will load and run any process whose Userspace Binary has a valid 4096-bit RSA credential, it only gives special permissions and access to the U2F Application.
The Identifier Policy defines the Application Identifier of a process to depend on the public key of its 4096-bit RSA credential. If it is the key known to belong to the U2F Application, the Application Identifier is the key. If the key is not recognized, the Application Identifier is a Locally Unique Identifier. The Short ID of the U2F Application is 1 and the Short ID of all other Applications is Locally Unique.
8.2.3 Use Case 3: Application Isolation
In this use case, Tock needs to support multiple Applications that can read and write local flash. Each Application has its own flash storage, and Tock isolates their flash storage from one another. An Application cannot access the flash of another Application. However, this is a development system or a system which does not require confidentiality. While there is storage isolation between Applications, this is for debuggability, easy of composition, and simplicity and not to meet security requirements. The Credentials Checking Policy is permissive and tries to run every properly formatted TBF Objects.
In this use case, the Application Identifier is a Global Identifier. It is the string name of the TBF Object as encoded in a TBF Header. The Short ID is a one's complement checksum of the string name.
If a developer installs two TBF Objects with the same string name, the
Tock kernel thinks they are the same Application and only runs one of
them. If a developer accidentally uses two different string names that
have the same checksum (e.g. both "dog" and "mal" checksum to 0x13a),
the Tock kernel also only runs one of them. Some local modifications
to tockloader check for these collisions and prevent the developer
from accidentally installing colliding Applications.
Note that in this case it is possible that the "mal" application could read data stored by the "dog" application.
8.3 Short ID Format
The 32-bit value MUST be non-zero. ShortId uses core::num::NonZeroU32
so that an ShortId can be 32 bits in size, with 0 reserved
for LocallyUnique.
#![allow(unused)] fn main() { #[derive(Clone, Copy)] enum ShortId { LocallyUnique, Fixed(core::num::NonZeroU32), } pub trait Compress { fn to_short_id(process: &ProcessBinary) -> ShortId; } }
Generally, the Process Checker that implements
AppUniqueness also implements Compress. This allows it to
share copies of public keys or other credentials that it uses to make
decisions, reducing flash space dedicated to these constants. Doing so
also makes it less likely that the two are inconsistent.
8.4 Short ID Considerations
It is RECOMMENDED that the Fixed field of ShortId be completely
hidden and unknown to modules that use ShortId to manage security
policies. They should depend on obtaining ShortId values based on
known names or methods. For example, the implementation of an
Identifier Policy can define a method, privileged_id, which returns
the Short ID associated with special privileges. Kernel modules which
want to give these processes extra permissions can check whether the
ShortId associated with a process matches the ShortId returned
from privileged_id. Alternatively, when they are initialized, they
can be passed a slice or array of ShortIds which are allowed; system
initialization generates this set once and passes it into the module
so it does not need to maintain a reference to the structure
implementing Compress.
The exact Fixed values used is an internal implementation decision for
the implementer of Compress and the Identifier Policy. Doing so
cleanly decouples modules through APIs and does not leak internal
state.
9 The AppIdPolicy Trait
The AppIdPolicy trait is a composite trait that
combines AppUniqueness and Compress
into a single trait so it can be passed as a single reference.
#![allow(unused)] fn main() { pub trait AppIdPolicy: AppUniqueness + Compress {} impl<T: AppUniqueness + Compress> AppIdPolicy for T {} }
10 Capsules
Capsules can use AppID to restrict access to only certain processes or to partition a resource based among processes. By using AppID, this assignment is persistent across reboots and application updates.
For example, consider a display that is divided such that different applications are given access to different regions of the display. These assignments should be persistent to main continuity for the user looking at the display, even if applications are added or removed.
This is a very incomplete example but it shows the general use of ShortId within
a capsule. Note that accessing a ShortId is done using ProcessId.
#![allow(unused)] fn main() { pub struct AppScreenRegion { app_id: kernel::process::ShortId, frame: Frame, } pub struct ScreenShared<'a, S: hil::screen::Screen<'a>> { screen: &'a S, apps: Grant<App, UpcallCount<1>, AllowRoCount<{ ro_allow::COUNT }>, AllowRwCount<0>>, apps_regions: &'a [AppScreenRegion], } impl<'a, S: hil::screen::Screen<'a>> ScreenShared<'a, S> { fn get_app_screen_region_frame(&self, process_id: ProcessId) -> Option<Frame> { // Check if a process with that short ID has an allocated frame. let short_id = process_id.short_app_id(); for app_screen_region in self.apps_regions { if short_id == app_screen_region.app_id { return Some(app_screen_region.frame); } } None } fn write_screen(&self, process_id: ProcessId) { let screen_region = self.get_app_screen_region_frame(process_id); self.screen.write(screen_region); } } impl<'a, S: hil::screen::Screen<'a>> SyscallDriver for ScreenShared<'a, S> { fn command(&self, command_num: usize, _: usize, _: usize, process_id: ProcessId) -> CommandReturn { match command_num { // Driver existence check 0 => CommandReturn::success(), // Write 1 => { self.write_screen(process_id); CommandReturn::success() } _ => CommandReturn::failure(ErrorCode::NOSUPPORT), } } } }
11 Implementation Considerations
Notes about requirements for application identifier generation/calculation (must be synchronous).
12 Authors' Addresses
Philip Levis
409 Gates Hall
Stanford University
Stanford, CA 94305
USA
pal@cs.stanford.edu
Johnathan Van Why <jrvanwhy@google.com>
Brad Campbell <bradjc@virginia.edu>
Digest HIL
TRD:
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Alistair Francis, Philip Levis
Draft-Created: June 8, 2022
Draft-Modified: June 8, 2022
Draft-Version: 1
Draft-Discuss: devel@lists.tockos.org
Abstract
This document describes the hardware independent layer interface (HIL) for hash functions. A digest is the output of a hash function. It describes the Rust traits and other definitions for this service as well as the reasoning behind them. This document is in full compliance with TRD1. The HIL in this document also adheres to the rules in the HIL Design Guide, which requires all callbacks to be asynchronous -- even if they could be synchronous.
1 Introduction
A hash function takes a potentially large input and transforms it into a fixed-length value. Hash functions have many uses and so there are many types of hash functions with different properties (computational speed, memory requirements, output distributions). A digest is the output of a hash function. Generally, hash functions seek to produce digest values that are uniformly distributed over their space of possible values, "hashing" the input and mixing it up such that the distance between the digests from two similar input values seem randomly distributed.
Cryptographic hash functions are a class of hash functions which have two properties that make them useful for checking the integrity of data. First, they have collision resistance: it is difficult to find two messages, m1 and m2, such that hash(m1) = hash(m2). Second, they have pre-image resistance, such that given a digest d, it is difficult to find a message m such that hash(m) = d. SHA256 and SHA3 are example cryptographic hash functions that are commonly used today and believed to provide both collision resistance and pre-image resistance.Boneh and Shoup.
Message authentication codes (MACs) are a method for providing integrity when both the generator and checker share a secret. MACs are a distinct integrity mechanism than digests. They provide both integrity and authenticity that the message came from a certain sender (who holds the secret). Some MACs, such as HMAC, are built on top of hash functions.
This document describes Tock's traits and their semantics for computing digests in the Tock operating system. These traits can also be used for generating HMACs.
2 Adding Data to a Digest: DigestData and ClientData
A client adds data to a hash function's input with the DigestData trait
and receives callbacks with the ClientData trait.
These traits support both mutable and immutable data. Most HIL traits
in Tock support only mutable data, because it is assumed the data is
in RAM and passing it without the mut qualifier in a split-phase
operation can discard its mutability
(see Rule 5 in TRD2). Digest supports immutable
data because many services need to compute digests over large, read-only data
in flash. One example of this is the kernel's process loader, which needs
to check that process images are not corrupted. Because digests are
computationally inexpensive, copying the data from flash to RAM in order
to compute a digest is a large overhead. Furthermore, the data input can
be large (tens or hundreds of kilobytes). Therefore DigestData and
ClientData support both mutable and immutable inputs.
Clients provide input to DigestData through the SubSlice
and SubSliceMut types. These allow a client to ask a
digest engine to compute a digest over a subset of their data, e.g. to
exclude the area where the digest that will be compared against is stored.
These types have a source slice and maintain an active range over that slice.
The digest will be computed only over the active range, rather than the
entire slice.
#![allow(unused)] fn main() { pub trait DigestData<'a, const L: usize> { fn set_data_client(&'a self, client: &'a dyn ClientData<'a, L>); fn add_data(&self, data: SubSlice<'static, u8>) -> Result<(), (ErrorCode, SubSlice<'static, u8>)>; fn add_mut_data(&self, data: SubSliceMut<'static, u8>) -> Result<(), (ErrorCode, SubSliceMut<'static, u8>)>; fn clear_data(&self); } }
A successful call to add_data or add_mut_data will add all of the
data in the active range of the leasable buffer as input to the hash
function. A successful call is one which returns Ok(()) and whose
completion event passes Ok(()). If a client needs to compute a hash over several non-contiguous
regions of a slice, or multiple slices, it can call these methods multiple
times.
There may only be one outstanding add_data or add_mut_data operation at
any time. If either add_data or add_mut_data returns Ok(()), then all
subsequent calls to add_data or add_mut_data MUST return Err((ErrorCode::BUSY, ...))
until a completion callback delivered through ClientData.
#![allow(unused)] fn main() { pub trait ClientData<'a, const L: usize> { fn add_data_done(&'a self, result: Result<(), ErrorCode>, data: SubSlice<'static, u8>); fn add_mut_data_done( &'a self, result: Result<(), ErrorCode>, data: SubSliceMut<'static, u8>, ); } }
The data parameters of add_data_done and add_mut_data_done indicate what
data was added and what remains to be added to the digest. If either callback
has a result value of Ok(()), then the active region of data MUST be zero
length and all of the data in the active region passed through the corresponding
call MUST have been added to the digest.
A call to DigestData::clear_data() terminates the current digest computation and
clears out all internal state to start a new one.
If there is an outstanding add_data or add_data_mut when clear_data() is called,
the digest engine MUST issue a corresponding callback with an Err(ErrorCode::CANCEL).
A digest engine MUST accept multiple calls to add_data and add_mut_data. Each
call appends to the data over which the digest is computed.
3 Computing and Verification: DigestHash, DigestVerify, ClientHash, and ClientVerify
Once all of the data has been added as the input to a digest, a client
can either compute the digest or ask the digest engine to compare its
computed digest with a known value (verify). These traits have a
generic parameter L which defines the length of the digest in bytes.
A SHA256 digest engine, for example, has an L of 32.
#![allow(unused)] fn main() { pub trait DigestHash<'a, const L: usize> { fn set_hash_client(&'a self, client: &'a dyn ClientHash<'a, L>); fn run(&'a self, digest: &'static mut [u8; L]) -> Result<(), (ErrorCode, &'static mut [u8; L])>; } pub trait ClientHash<'a, const L: usize> { fn hash_done(&'a self, result: Result<(), ErrorCode>, digest: &'static mut [u8; L]); } pub trait DigestVerify<'a, const L: usize> { fn set_verify_client(&'a self, client: &'a dyn ClientVerify<'a, L>); fn verify(&'a self, compare: &'static mut [u8; L]) -> Result<(), (ErrorCode, &'static mut [u8; L])>; } pub trait ClientVerify<'a, const L: usize> { fn verification_done(&'a self, result: Result<bool, ErrorCode>, compare: &'static mut [u8; L]); } }
Calls to DigestHash::run and DigestHash::verify perform the hash
function on all of the data that has been added with calls to
add_data and add_data_mut. If there is an outstanding call to
add_data, add_data_mut, run, or verify they MUST return
Err(ErrorCode::BUSY).
The ClientHash::hash_done callback returns the computed digest
stored in the digest slice. If the result argument is Err((...)),
the digest slice may store any values. If the result argument
is Ok(()) the digest slice MUST store the computed digest.
The DigestVerity:verify takes an existing digest as its compare
parameter. It triggers the digest engine to compute the digest, then
compares the computed value with what was passed in compare. If the
computed and provided values match, then ClientVerify passes
Ok(true); if they do not match then it passes Ok(false). An Err
result indicates that there was an error in computing the digest.
Calling either DigestHash::run or DigestVerify::verify completes
the digest calculation, returning the digest engine to an idle
state for the next computation.
4 Composite Traits
The Digest HIL provides many composite traits, so that structures
which implement multiple traits can be passed around as a single
reference. The ClientDataHash trait is for a client that implements
both ClientData and ClientHash. The ClientDataVerify trait is
for a client that implements both ClientData and ClientVerify.
The Client trait is for a client that implements ClientData,
ClientHash, and ClientVerify.
#![allow(unused)] fn main() { pub trait ClientDataHash<'a, const L: usize>: ClientData<'a, L> + ClientHash<'a, L> {} pub trait ClientDataVerify<'a, const L: usize>: ClientData<'a, L> + ClientVerify<'a, L> {} pub trait Client<'a, const L: usize>: ClientData<'a, L> + ClientHash<'a, L> + ClientVerify<'a, L> {} }
The DigestDataHash trait is for a structure that implements both
DigestData and DataHash. The DigestDataVerify trait is for a
client that implements both DigestData and DigestVerify. The
Digest trait is for a client that implements DigestData,
DigestHash, and DigestVerify. These each add an additional
method, set_client, which allows it to store the corresponding
client as a single reference and use it for all of the relevant
client callbacks (e.g., add_data, add_mut_data, hash_done, and
verification_done). A digest implementation that implements
set_client MAY choose to not implement the individual client set
methods for the different traits (e.g., DigestData::set_client); if
it does so, each of these client set methods MUST be marked
unimplemented!().
#![allow(unused)] fn main() { pub trait DigestDataHash<'a, const L: usize>: DigestData<'a, L> + DigestHash<'a, L> { /// Set the client instance which will receive `hash_done()` and /// `add_data_done()` callbacks. fn set_client(&'a self, client: &'a dyn ClientDataHash<L>); } pub trait DigestDataVerify<'a, const L: usize>: DigestData<'a, L> + DigestVerify<'a, L> { /// Set the client instance which will receive `verify_done()` and /// `add_data_done()` callbacks. fn set_client(&'a self, client: &'a dyn ClientDataVerify<L>); } pub trait Digest<'a, const L: usize>: DigestData<'a, L> + DigestHash<'a, L> + DigestVerify<'a, L> { /// Set the client instance which will receive `hash_done()`, /// `add_data_done()` and `verification_done()` callbacks. fn set_client(&'a self, client: &'a dyn Client<'a, L>); } }
5 Configuration
Digest engines can often operate in multiple modes, supporting several
different hash algorithms and digest sizes. Configuring a digest
engine occurs out-of-band from adding data and computing digests,
through separate traits. Each digest algorithm is described by
a separate trait. This allows compile-time checking that a given
digest engine supports the required algorithm. For example,
a digest engine that can compute a SHA512 digest implements
the Sha512 trait:
#![allow(unused)] fn main() { pub trait Sha512 { /// Call before Digest::run() to perform Sha512 fn set_mode_sha512(&self) -> Result<(), ErrorCode>; } }
The Digest HIL defines seven standard Digest traits:
Sha224Sha256Sha384Sha512HmacSha256HmacSha384HmacSha512
The HMAC configuration methods take a secret key, which is used in the HMAC algorithm. For example,
#![allow(unused)] fn main() { pub trait HmacSha384 { /// Call before `Digest::run()` to perform HMACSha384 /// /// The key used for the HMAC is passed to this function. fn set_mode_hmacsha384(&self, key: &[u8]) -> Result<(), ErrorCode>; } }
Configuration methods MUST be called before the first call to add_data
or add_data_mut.
6 Capsules
There are 5 standard Tock capsules for digests:
capsules::hmacprovides a system call interface to a digest engine that supportsDigest,HmacSha256,HmacSha384, andHmacSha512.capsules::shaprovides a system call interface to a digest engine that supportsDigest,Sha256,Sha384, andSha512.capsules::virtual_hmacvirtualizes an HMAC engine, allowing multiple clients to share it through queueing. It requires a digest engine that supportsDigest,HmacSha256,HmacSha384, andHmacSha512.capsules::virtual_shavirtualizes a SHA engine, allowing multiple clients to share it through queueing. It requires a digest engine that supportsDigest,Sha256,Sha384, andSha512.capsules::virtual_digestvirtualizes a SHA/HMAC engine, allowing multiple clients to share it through queueing. It requires a digest engine that supportsDigest,HmacSha256,HmacSha384, andHmacSha512,Sha256,Sha384, andSha512and supports all of these operations.
6 Authors' Address
Alistair Francis
alistair.francis@wdc.com
Philip Levis
409 Gates Hall
Stanford University
Stanford, CA 94305
USA
pal@cs.stanford.edu
Public and Private Encryption Keys
TRD: 1
Working Group: Kernel
Type: Documentary
Status: Draft
Authors: Alistair Francis
Draft-Created: 11 Oct, 2021
Draft-Modified: 11 Oct, 2021
Draft-Version: 1
Abstract
This document describes the Tock Public Private Key implementation. This documents the design process and final outcome. This focuses on the original RSA key support, but applies to all public/private keys.
1 Introduction
The goal of pub/priv keys in Tock is to allow the kernel and apps to use pub/priv crypto operations. It is expected that these are used before loading applications, to check signatures as well as by the kernel and/or apps during runtime.
The goal is to support 3 main use cases, for key storage:
- Keys stored on flash. The keys are stored at some address in read only flash and we want to "import" them and use them in the kernel.
- The app specifies a key. A userspace application obtains a key and passes it to the kernel to use for crypto operations
- We generate a key pair while running
2 Design Considerations
The design needs to integrate well with the rest of the Tock kernel and capsule design. As well as that we want to ensure
2.1 Low memory overhead
Pub/priv keys can be very large. For example a 4096-bit RSA key is 512 byes long. That means to store a pub/priv key pair in RAM we need at least 1024 bytes (1K) of memory, just for one key pair. That doesn't take into account potential post quantum algorithms that can have even larger keys.
Due to this the design should avoid copying keys into memory where not required. For example generating a new key pair will need to use memory, but reading existing keys from flash should avoid copying keys to memory.
2.2 Mutable and immutable buffers
As the implementation should support importing existing keys from flash or from userspace the design must allow for both mutable and immutable buffers.
3 Possible key structure implementations
Below is a list of possible implementations, as well as outcomes of that design. For consistency all designs below are for a 2048-bit RSA key/pair, but the designs could apply for any pub/priv operations
3.1 In memory buffers
Keys would be stored in a memory sturcture, similar to:
#![allow(unused)] fn main() { pub struct RSA2048Keys<'a> { modulus: [u8; 256], // Also called n public_exponent: u32, // Also called e private_exponent: [u8; 256], // Also called d ... } }
As mentioned in section 2.1 this requires large in memory buffers, even when using an existing key on flash. Due to that this method will not be used.
3.2 TakeCell buffers
In order to avoid storing the keys in memory, the design can instead use
TakeCell. This way existing keys can pass in a buffer to the key, while
new keys can use a buffer created with static_init!()
#![allow(unused)] fn main() { pub struct RSA2048Keys<'a> { public_key: TakeCell'static, u8>, private_key: TakeCell'static, u8>, ... } }
For example, importing a key would look like this:
#![allow(unused)] fn main() { fn import_public_key(&mut self, public_key: &'static mut [u8], ) -> Result<(), (ErrorCode, &'static mut [u8])> }
The problem with using TakeCell is that then the buffer must be mutable.
This won't work with a read-only buffer stored in flash.
The design also can't use Cell and immutable buffers instead, as then the
design doesn't work with mutable buffers, required for genearating keys or
interacting with userspace.
3.3 Mutable and Immutable buffers
Similar to above, this design uses interior mutability, but adds this enum
#![allow(unused)] fn main() { pub enum MutImutBuffer<'a, T> { Mutable(&'a mut [T]), Immutable(&'a [T]), } }
Then the key structure will look like
#![allow(unused)] fn main() { pub struct RSA2048Keys<'a> { public_key: OptionalCell<MutImutBuffer<'static, u8>>, private_key: OptionalCell<MutImutBuffer<'static, u8>>, ... } }
This is similar to 3.2, but allows either a mutable or immutable buffer.
For example to import a key the function would look like:
#![allow(unused)] fn main() { fn import_public_key( &'a self, public_key: MutImutBuffer<'static, u8>, ) -> Result<(), (ErrorCode, MutImutBuffer<'static, u8>)>; }
This allows the design to use either a mutable or immutable buffer and doesn't have a high memory overhead.
3.4 Read and Read/Write keys
Similar to 3.3 the other option is to have a read only key and a read/write key and move the enum a level higher.
For example
#![allow(unused)] fn main() { pub struct RSA2048ReadOnlyKeys<'a> { public_key: OptionalCell<&'static [u8]>, private_key: OptionalCell<&'static [u8]>, ... } pub struct RSA2048ReadWriteKeys<'a> { public_key: TakeCell'static, u8>, private_key: TakeCell'static, u8>, ... } pub enum RSA2048Keys<'a> { Mutable(RSA2048ReadWriteKeys<'a>), Immutable(RSA2048ReadOnlyKeys<'a>), } }
This has the advantage that it's more obvious if a key is mutable or immutable.
This has a large code duplication downside though. There will be two
implementations, one for RSA2048ReadOnlyKeys and one for RSA2048ReadWriteKeys
that are almost identical.
On top of that there also will need to be two HILS, for example:
#![allow(unused)] fn main() { pub trait PubKeyReadWrite<'a> { fn import_public_key(&self, public_key: &'static mut [u8], ) -> Result<(), (ErrorCode, &'static mut [u8])> } pub trait PubKeyReadOnly<'a> { fn import_public_key(&self, public_key: &'static [u8], ) -> Result<(), (ErrorCode, &'static [u8])> } }
This has a complexity and code size downside compared to section 3.3, but can avoid confusion where a mutable buffer is required but not supplied.
4 Possible low level interface APIs
On top of the key structure implementation, there will also be a HIL that
hardware implementations inside chips will implement.
This TRD is not trying to describe this API, so let's just assume this is one of the functions are part of that HIL:
#![allow(unused)] fn main() { /// Calculate the exponent. That is calculate `message` ^ `exponent` /// /// On completion the `exponent_done()` upcall will be scheduled. fn exponent( &self, message: &'static mut [u8], exponent: T, result: &'static mut [u8], ) -> Result< (), ( ErrorCode, &'static mut [u8], T, &'static mut [u8], ), >; }
This function takes the message buffer and calculates the exponent from the
public or private key of type T and stores it in result.
The below sections describe why type T should be.
4.1 Mutable and Immutable buffers
See section 3.3 for the enum MutImutBuffer, which would be used like this:
#![allow(unused)] fn main() { /// Calculate the exponent. That is calculate `message` ^ `exponent` /// /// On completion the `exponent_done()` upcall will be scheduled. fn exponent( &self, message: &'static mut [u8], exponent: (MutImutBuffer<'static, u8>, Range<usize>), result: &'static mut [u8], ) -> Result< (), ( ErrorCode, &'static mut [u8], MutImutBuffer<'static, u8>, &'static mut [u8], ), >; }
In this case the underlying API will take a 'static buffer that is either
mutable or immutable. This is wraped in the MutImutBuffer enum. In this case
as well we specify a range of the buffer to be used.
This has the advantage that the hardware interfacing driver doesn't have to manage keys, instead it is just passed a buffer (wrapped in an emum). This is also similar to other Tock HILs.
The disadvantage is how to get the buffer before calling the above function.
This implementation requires that the above layer loose access to the buffer, with something like:
#![allow(unused)] fn main() { fn private_exponent(&'a self) -> Option<(MutImutBuffer<'static, u8>, Range<usize>)> { if self.private_key.is_some() { let len = PubPrivKey::len(self); Some((self.private_key.take().unwrap(), 0..len)) } else { None } } }
Which also requires a way to regain acceess to the buffer on the exponent() callback:
#![allow(unused)] fn main() { fn import_private_key( &self, private_key: MutImutBuffer<'static, u8>, ) -> Result<(), (ErrorCode, MutImutBuffer<'static, u8>)> { if private_key.len() != 256 { return Err((ErrorCode::SIZE, private_key)); } self.private_key.replace(private_key); Ok(()) } }
This option also requires the MutImutBuffer enum to work
4.2 Keys
The other option is to pass the entire key to the low level API, for example something like:
#![allow(unused)] fn main() { /// Calculate the exponent. That is calculate message ^ exponent /// /// On completion the `exponent_done()` upcall will be scheduled. fn exponent( &self, message: &'static mut [u8], key: &'static mut dyn RsaPrivKey, result: &'static mut [u8], ) -> Result< (), ( ErrorCode, &'static mut [u8], &'static mut dyn RsaPrivKey, &'static mut [u8], ), >; }
Using something like this in the HIL:
#![allow(unused)] fn main() { /// Returns the specified closure over the private exponent, if it exists /// The exponent is returned MSB (big endian) /// Returns `Some()` if the key exists and the closure was called, /// otherwise returns `None`. fn map_exponent(&self, closure: &dyn Fn(&[u8]) -> ()) -> Option<()>; }
and an implementation similar to:
#![allow(unused)] fn main() { fn map_exponent(&self, closure: &dyn Fn(&[u8]) -> ()) -> Option<()> { if let Some(private_key) = self.private_key.take() { match private_key { MutImutBuffer::Mutable(ref buf) => { let _ = closure(buf); } MutImutBuffer::Immutable(buf) => { let _ = closure(buf); } } self.private_key.replace(private_key); Some(()) } else { None } } }
Then the final implementation can use map() with this code:
#![allow(unused)] fn main() { key.map_exponent(&|buf| { // Do operations of the `buf` array }); }
This has the advantage that accessing information from keys is not distructive.
It does have the downside that hardware implementations in chips needs to
understand the key values to access.
5 Final implementation
TODO once agreed apon
6 Author's Address
Alistair Francis
alistair.francis@wdc.com
Kernel 802.15.4 Radio HIL
TRD:
Working Group: Kernel
Type: Documentary
Status: Draft
Authors: Philip Levis
Draft-Created: Feb 14, 2017
Draft-Modified: Mar 20, 2017
Draft-Version: 2
Draft-Discuss: devel@lists.tockos.org
Abstract
This document describes the hardware independent layer interface (HIL) for an 802.15.4 radio in the Tock operating system kernel. It describes the Rust traits and other definitions for this service as well as the reasoning behind them. This document is in full compliance with TRD1.
1 Introduction
Wireless communication is an integral component of sensor networks and the Internet of Things (IoT). 802.15.4 is low-power link layer that is well suited to ad-hoc and mesh networks. It underlies numerous network technologies, such as ZigBee, 6lowpan, and Thread, and there is a large body of research on how to use it for extremely robust and low-power networking. With a maximum frame size of 128 bytes, simple but effective coding to reduce packet losses, multiple addressing modes, AES-based cryptograpy, and synchronous link-layer acknowledgments, 802.15.4 is a flexible and efficient link layer for many applications and uses.
This document describes Tock's HIL for an 802.15.4 radio. The HIL is in the kernel create, in model hil::radio. It provides four traits:
- kernel::hil::radio::RadioControl: turn the radio on/off and configure it
- kernel::hil::radio::Radio: send, receive and access packets
- kernel::hil::radio::TxClient: handles callback when transmission completes
- kernel::hil::radio::RxClient: handles callback when packet received
- kernel::hil::radio::ConfigClient: handles callback when configuration changed
The rest of this document discusses each in turn.
2 Configuration constants and buffer management
To avoid extra buffers and memory copies, the radio stack requires that callers provide it with memory buffers that are larger than the maximum frame size it can send/receive. A caller provides a single, contiguous buffer of memory. The frame itself is at an offset within his buffer, and the data payload is at an offset from the beginnig of the frame. The implementation section gives a detailed example of this layout for the RF233 radio.
Following this approach, The Radio HIL defines 4 constants:
- kernel::hil::radio::HEADER_SIZE: the size of an 802.15.4 header,
- kernel::hil::radio::MAX_PACKET_SIZE: the maximum frame size,
- kernel::hil::radio::MAX_BUF_SIZE: the size buffer that must be provided to the radio, and
- kernel::hil::radio::MIN_PACKET_SIZE: the smallest frame that can be received (typically HEADER_SIZE + 2 for an error-detecting CRC).
Note that MAX_BUF_SIZE can be larger (but not smaller) than MAX_PACKET_SIZE. A radio must be given receive buffers that are MAX_BUF_SIZE in order to ensure that it can receive maximum length packets.
3 RadioControl trait
The RadioControl trait provides functions to initialize an 802.15.4 radio, turn it on/off and configure it.
3.1 Changing radio power state
fn initialize(&self,
spi_buf: &'static mut [u8],
reg_write: &'static mut [u8],
reg_read: &'static mut [u8])
-> Result<(), ErrorCode>;
fn reset(&self) -> Result<(), ErrorCode>;
fn start(&self) -> Result<(), ErrorCode>;
fn stop(&self) -> Result<(), ErrorCode>;
fn is_on(&self) -> bool;
fn busy(&self) -> bool;
fn set_power_client(&self, client: &'static PowerClient);
The initialize function takes three buffers, which are required for
the driver to be able to control the radio over an SPI bus. The first,
spi_buf, MUST have length MAX_BUF_SIZE. This buffer is required so that
the driver can interact over an SPI bus. An SPI bus usually requires both
a transmit and a receive buffer: software writes out the the TX buffer
(the MOSI line) while it reads into the RX buffer (MISO line). When
a caller tries to transmit a packet buffer, the radio needs an SPI receive
buffer to check the radio status. Similarly, when the stack receives
a packet into a buffer, it needs an SPI transmit buffer to send the command
to read from radio memory. The spi_buf buffer is purely internal, once
configured, it MUST never be visible outside of the stack.
The reg_write and reg_read buffers are needed to read and write
radio registers over the SPI bus. They are both 2 bytes long. These
buffers are purely internal and MUST never be visible outside the
stack.
The reset function resets the radio and configures its underlying
hardware resources (GPIO pins, buses, etc.). reset MUST be called
at before calling start.
The start function transitions the radio into a state in which it
can send and receive packets. It either returns FAIL because the
radio cannot be started or Ok(()) if it will be started. If the radio
is already started (or in the process), start MUST return FAIL. I.e.,
if software calls start twice, the second call would return FAIL.
Software can tell when the radio has completed initialization by
caling started.
The stop function returns the radio to a low-power state. The
function returns Ok(()) if the radio will transition to a
low-power state and FAIL if it will not. Software can tell when the
radio has turned off by calling started.
The is_on function returns whether the radio is in a powered-on
state. If the radio is on and can send/receive packets, it MUST return
true. If the radio cannot send/receive packets, it MUST return false.
The busy function returns whether the radio is currently busy.
It MUST return false if the radio is currently idle and can accept
reconfiguration or packet transmission requests. If it is busy and
cannot accept reconfiguration or packet transmission requests, it
MUST return true.
The set_power_client function allows a client to register a
callback for when the radio's power state changes.
3.2 Configuring the radio
Re-configuring an 802.15.4 radio is an asynchronous operation.
Calling functions to change the radio's configuration does not
actually reconfigure it. Instead, those configuration changes
must be committed by calling config_commit. The radio issues a
callback when the reconfiguration completes. The object to receive
the callback is set by calling set_config_client. If config_commit
returns Ok(()) and there is a configuration client installed, the
radio MUST issue a config_done callback. config_commit MAY
return OFF if the radio is off, or may return Ok(()) and hold the
configuration commit until the radio is turned on again.
fn set_config_client(&self, client: &'static ConfigClient);
fn config_commit(&self) -> Result<(), ErrorCode>;
A caller can configure the 16-bit short address, 64-bit full address,
PAN (personal area network) identifier, transmit power, and
channel. The PAN address and node address are both 16-bit values.
Channel is an integer in the range 11-26 (the 802.15.4 channel
numbers). The channel is encoded in the radio::RadioChannel
enum, ensuring the channel value resides in the valid range.
fn config_address(&self) -> u16;
fn config_address_long(&self) -> [u8;8];
fn config_pan(&self) -> u16;
fn config_tx_power(&self) -> i8;
fn config_channel(&self) -> u8;
fn config_set_address(&self, addr: u16);
fn config_set_address_long(&self, addr: [u8;8]);
fn config_set_pan(&self, addr: u16);
fn config_set_tx_power(&self, power: i8) -> Result<(), ErrorCode>;
fn config_set_channel(&self, chan: radio::RadioChannel);
config_set_tx_power takes an signed integer, whose units are dBm.
If the specified value is greater than the maximum supported transmit
power or less than the minimum supported transmit power, it MUST
return INVAL. Otherwise, it MUST set the transmit power to the
closest value that the radio supports. config_tx_power MUST return
the actual transmit power value in dBm. Therefore, it is possible that
the return value of config_tx_power returns a different (but close)
value than what it set in config_set_tx_power.
4 RadioData trait for sending and receiving packets
The RadioData trait implements the radio data path: it allows clients to send and receive packets as well as accessors for packet fields.
fn payload_offset(&self, long_src: bool, long_dest: bool) -> u8;
fn header_size(&self, long_src: bool, long_dest: bool) -> u8;
fn packet_header_size(&self, packet: &'static [u8]) -> u8;
fn packet_get_src(&self, packet: &'static [u8]) -> u16;
fn packet_get_dest(&self, packet: &'static [u8]) -> u16;
fn packet_get_src_long(&self, packet: &'static [u8]) -> [u8;8]
fn packet_get_dest_long(&self, packet: &'static [u8]) -> [u8;8];
fn packet_get_pan(&self, packet: &'static [u8]) -> u16;
fn packet_get_length(&self, packet: &'static [u8]) -> u8;
fn packet_has_src_long(&self, packet: &'static [u8]) -> bool;
fn packet_has_dest_long(&self, packet: &'static [u8]) -> bool;
The packet_ functions MUST NOT be called on improperly formatted
802.15.4 packets (i.e., only on received packets). Otherwise the
return values are undefined. payload_offset returns the offset in a
buffer at which the radio stack places the data payload. To send a
data payload, a client should fill in the payload starting at this
offset. For example, if payload_offset returns 11 and the caller
wants to send 20 bytes, it should fill in bytes 11-30 of the buffer
with the payload. header_size returns the size of a header based
on whether the source and destination addresses are long (64-bit)
or short (16-bit). packet_header_size returns the size of the
header on a particular correctly formatted packet (i.e., it looks
at the header to see if there are long or short addresses).
The data path has two callbacks: one for when a packet is received and one for when a packet transmission completes.
fn set_transmit_client(&self, client: &'static TxClient);
fn set_receive_client(&self, client: &'static RxClient,
receive_buffer: &'static mut [u8]);
fn set_receive_buffer(&self, receive_buffer: &'static mut [u8]);
Registering for a receive callback requires also providing a packet
buffer to receive packets into. The receive callback MUST pass this
buffer back. The callback handler MUST install a new receive buffer
with a call to set_receive_buffer. This buffer MAY be the same
buffer it received or a different one.
Clients transmit packets by calling transmit or transmit_long.
fn transmit(&self,
dest: u16,
tx_data: &'static mut [u8],
tx_len: u8,
source_long: bool) -> Result<(), ErrorCode>;
fn transmit_long(&self,
dest: [u8;8],
tx_data: &'static mut [u8],
tx_len: u8,
source_long: bool) -> Result<(), ErrorCode>;
The packet sent on the air by a call to transmit MUST be formatted
to have a 16-bit short destination address equal to the dest
argument. A packet sent on the air by a call to transmit_long MUST
be formatted to have a 64-bit destination address equal to the dest
argument.
The source_long parameter denotes the length of the source address in
the packet. If source_long is false, the implementation MUST include
a 16-bit short source address in the packet. If source_long is true,
the implementation MUST include a 64-bit full source address in the
packet. The addresses MUST be consistent with the values written and
read with config_set_address, config_set_address_long,
config_address, and config_address_long.
The passed buffer tx_data MUST be MAX_BUF_LEN in size. tx_len is
the length of the payload. If transmit returns Ok(()), then the
driver MUST issue a transmission completion callback. If transmit
returns any value except Ok(()), it MUST NOT accept the packet for
transmission and MUST NOT issue a transmission completion callback. If
tx_len is too long, transmit MUST return SIZE. If the radio is
off, transmit MUST return OFF. If the stack is temporarilt unable
to send a packet (e.g., already has a transmission pending), then
transmit MUST return BUSY. If the stack accepts a packet for
transmission (returns Ok(())), it MUST return BUSY until it issues a
transmission completion callback.
5 TxClient, RxClient, ConfigClient, and PowerClient traits
An 802.15.4 radio provides four callbacks: packet transmission completion, packet reception, when a change to the radio's configuration has completed, and when the power state of the radio has changed.
pub trait TxClient {
fn send_done(&self, buf: &'static mut [u8], acked: bool, result: Result<(), ErrorCode>);
}
The buf paramater of send_done MUST pass back the same buffer that
was passed to transmit. acked specifies whether the sender
received a link-layer acknowledgement (indicating the packet was
successfully received). result indicates whether or not the packet
was transmitted successfully; it can take on any of the valid return
values for transmit or FAIL to indicate other reasons for failure.
The receive callback is called whenever the radio receives a packet
destined to the node's address (including broadcast address) and PAN
id that passes a CRC check. If a packet is not destined to the node or
does not pass a CRC check then receive MUST NOT be called. buf is
the buffer containing the received packet. It MUST be the same buffer
that was passed with either installing the receive handler or calling
set_receive_buffer. The buffer is consumed through the callback: the
radio stack MUST NOT maintain a reference to the buffer. A client that
wants to receive another packet MUST call set_receive_buffer.
pub trait RxClient {
fn receive(&self, buf: &'static mut [u8], len: u8, result: Result<(), ErrorCode>);
}
The config_done callback indicates that a radio reconfiguration has
been committed to hardware. If the configuration has been successfully
committed, result MUST be Ok(()). It may otherwise take on any
value that is a valid return value of config_commit or FAIL to
indicate another failure.
pub trait ConfigClient {
fn config_done(&self, result: Result<(), ErrorCode>);
}
The changed callback indicates that the power state of the radio
has changed. The on parameter states whether it is now on or off.
If a call to stop using the RadioConfig interface returns Ok(()),
the radio MUST issue a changed callback when the radio is powered
off, passing false as the value of the on parameter. If a
call to start using the RadioConfig interface returns Ok(()),
the radio MUST issue a changed callback when the radio is powered
on, passing true as the value of the on parameter.
pub trait PowerClient {
fn changed(&self, on: bool);
}
The return value of is_on MUST be consistent with the state as
exposed through the changed callback. If the changed callback has
indicated that the radio is on, then is_on MUST return true a later
callback signals the radio is off. Similarly, if the changed callback
has indicated that the radio is off, then is_on MUST return false
until a later callback signals the radio is on.
6 RadioCrypto trait
The RadioCrypto trait is for configuring and enabling/disabling different security settings.
7 Example Implementation: RF233
An implementation of the radio HIL for the Atmel RF233 radio can be
found in capsules::rf233. This implementation interacts with an RF233
radio over an SPI bus. It supports 16-bit addresses, intra-PAN
communication, and synchronous link-layer acknowledgments. It has two
files: rf233.rs and rf233_const.rs. The latter has constants such
as register identifiers, command formats, and register flags.
The RF233 has 6 major operations of the SPI bus: read a register, write a register, read an 802.15.4 frame, write an 802.15.4 frame, read frame SRAM and write frame SRAM. The distinction between frame and SRAM access is that frame access always starts at index 0, while SRAM access has random access (a frame operation is equivalent to an SRAM operation with address 0). The implementation only uses register and frame operations. The details of these operations can be found in Section 6.3 of the RF233 datasheet RF233.
The implementation has 6 high-level states:
- off,
- initializing the radio,
- turning on the radio to receive,
- waiting to receive packets (default idle state),
- receiving a packet,
- transmitting a packet, and
- committing a configuration change.
All of these states, except off, have multiple substates. They reach represent a (mostly) linear series of state transitions. If a client requests an operation (e.g., transmit a packet, reconfigure) while the stack is in the waiting state, it starts the operation immediately. If it is in the midst of receiving a packet, it marks the operation as pending and completes it when it falls back to the waiting state. If there is both a packet transmission and a reconfiguration pending, it prioritizes the transmission first.
The RF233 provides an interrupt line to the processor, to denote some state changes. The radio has multiple interrupts, which are are multiplexed onto a single interrupt line. Software is responsible for reading an interrupt status register on the radio (a register read operation) to determine what interrupts are pending. Since a register read requires an SPI operation, it can be significantly delayed. For example, if the stack is the midst of writing out a packet to the radio's frame buffer, it will complete the SPI operation before issuing a register read. In cases when transmissions are interrupted by packet reception, the stack simply marks the packet as pending and waits for the reception to complete, then retries the transmission.
8 Authors' Address
Philip Levis
409 Gates Hall
Stanford University
Stanford, CA 94305
phone - +1 650 725 9046
email - pal@cs.stanford.edu
- Citations ========================================
Kernel Serial Peripheral Interface (SPI) HIL
TRD:
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Philip Levis, Alexandru Radovici
Draft-Created: 2021/08/13
Draft-Modified: 2021/08/13
Draft-Version: 2
Draft-Discuss: devel@lists.tockos.org
Abstract
This document proposes hardware independent layer interface (HIL) for a serial peripheral interface (SPI) bus in the Tock operating system kernel. It describes the Rust traits and other definitions for this service as well as the reasoning behind them. This document is in full compliance with TRD1.
Note that this HIL has not been implemented yet in the master branch of Tock -- this is a working document as the HIL is designed.
1 Introduction
The serial peripheral interface (SPI) is a standard bus design for processors and microcontrollers to exchange data with sensors, I/O devices, and other off-chip compoments. The bus is clocked. The device driving the clock is called a "master" or "controller" and the device whose clock is driven is called a "slave" or "peripheral". A SPI bus has three data lines: the clock (CLK), data from the controller to the peripheral (MOSI) and data from the peripheral to the controller (MISO). A SPI bus does not have addressing. Instead, peripherals have a chip select (CS) pin. When a peripheral's chip select line is brought low, it receives data on MOSI and sends data on MISO. A controller can connect to CS pins on many different devices and share the bus between them by explicitly controlling which ones are active.
The SPI HIL is in the kernel crate, in module hil::spi. It provides seven main
traits:
kernel::hil::spi::Configure: provides an abstraction of configuring a SPI bus by setting its data rate, phase, and polarity.kernel::hil::spi::Controller: allows a client for a SPI in controller mode to send and receive data.kernel::hil::spi::ControllerDevice: combinesConfigureandControllerto provide an abstraction of a SPI bus in controller mode for a client that is bound to a specific chip select (e.g., a sensor driver). It allows a client to send and receive data as well as configure the bus for (only) its own operations.kernel::hil::spi::ChipSelect: allows a client to change which chip select is active on a SPI bus incontroller mode.kernel::hil::spi::ControllerBus: combinesControllerDeviceandChipSelectto allow a client to issue SPI operations on any chip select. It also supports initializing the bus hardware. This trait is intended to be implemented by a chip implementation.kernel::hil::spi::PeripheralDevice: extendsConfigureand provides an abstraction of a SPI bus in peripheral mode. It allows a client to learn when it is selected, to send and receive data, and configure the bus for its own operations.kernel::hil::spi::PeripheralBus: extendsPeripheralDeviceto support initializing the bus hardware. This trait is intended to be implemented by a chip peripheral implementation.kernel::hil::spi::Bus: represents a SPI bus that can be dynamically changed between controller and peripheral modes. This trait is intended to be implemented by a chip implementation.
A given board MUST NOT include an implementation of more than one of
the ControllerBus, PeripheralBus, and Bus traits for a given SPI
bus. these traits are mutually exclusive.
This document describes these traits and their semantics.
2 Configure trait
The Configure trait allows a client to set the data rate (clock
frequency) of the SPI bus as well as its polarity and phase. Polarity
controls whether the clock line is high or low when the bus is
idle. Phase controls on which clock edges the bus clocks data in and
out. It also allows configuring whether data is sent most significant
bit first or least significant bit first.
#![allow(unused)] fn main() { pub enum DataOrder { MSBFirst, LSBFirst, } pub enum ClockPolarity { IdleLow, IdleHigh, } pub enum ClockPhase { SampleLeading, SampleTrailing, } pub trait Configure { fn set_rate(&self, rate: u32) -> Result<u32, ErrorCode>; fn get_rate(&self) -> u32; fn set_polarity(&self, polarity: ClockPolarity) -> Result<(), ErrorCode>; fn get_polarity(&self) -> ClockPolarity; fn set_phase(&self, phase: ClockPhase) -> Result<(), ErrorCode>; fn get_phase(&self) -> ClockPhase; fn set_data_order(&self, order: DataOrder) -> Result<(), ErrorCode>; fn get_data_order(&self) -> DataOrder; } }
All of the set methods in Configure can return an error. Valid errors are:
- INVAL (
set_rateonly): the parameter is outside the allowed range - NOSUPPORT (
set_polarity,set_phase,set_data_order): the parameter provided cannot be supported. For example, a SPI bus that cannot have anIdleHighpolarity returns NOSUPPORT if a client tries to set it to have this polarity. - OFF (all): the bus is currently powered down in a state that does not allow configuring it.
- BUSY (all): the bus is in the midst of an operation and cannot currently change its configuration.
- FAIL (all): some other error occurred.
The set_rate method returns a u32 in its success case. This is the
actual data rate set, which may differ from the one passed, e.g., due
to clock precision or prescalars. The actual rate rate set MUST be
less than the rate passed. If no rate can be set (e.g., the rate
is too small), set_rate MUST return Err(INVAL).
The relationship of phase and polarity follows the standard SPI specification[1]:
+------------+------------------+-------------+----------------+----------------+ | Polarity | Phase | Idle Level | Data Out | Data In | +------------+------------------+-------------+----------------+----------------+ | IdleLow | SampleLeading | Low | Rising Edge | Falling Edge | | IdleLow | SampleTrailing | Low | Falling Edge | Rising Edge | | IdleHigh | SampleLeading | High | Rising Edge | Rising Edge | | IdleHigh | SampleTrailing | High | Falling Edge | Falling Edge | +------------+------------------+-------------+----------------+----------------+
If the SPI bus is in the middle an outstanding operation
(Controller::read_write_bytes or Peripheral::read_write_bytes),
calls to Configure to set values MUST return BUSY.
3 Controller, ControllerDevice, and ControllerClient traits
The Controller trait allows a client to send and receive data on a SPI bus
in controller mode:
#![allow(unused)] fn main() { pub trait Controller<'a> { fn set_client(&self, client: &'a dyn ControllerClient); fn read_write_bytes( &self, write_buffer: &'a mut [u8], read_buffer: Option<&'a mut [u8]>, len: usize, ) -> Result<(), (ErrorCode, &'a mut [u8], Option<&'a mut [u8]>)>; } pub trait ControllerClient<'a> { fn read_write_done( &self, write_buffer: &'a mut [u8], read_buffer: Option<&'a mut [u8]>, len: usize, status: Result<(), ErrorCode>, ); } }
The read_write_bytes method always takes a buffer to write and has
an optional buffer to read into. For operations that do not need to
read from the SPI peripheral, the read_buffer can be None.
If the call to read_write_bytes returns Ok(()), the implementation
MUST issue a callback to the SpiControllerClient when it
completes. If the call returns an Err, the implementation MUST NOT
issue a callback, except if the ErrorCode is BUSY. In this case,
the implementation issues a callback for the outstanding operation but
does not issue a callback for the failed one. If it returns Err, the
implementation MUST return the buffers passed in the call. Valid
ErrorCode values for an Err result are:
- BUSY: the SPI is busy with another call to
read_write_bytesand so cannot complete the request. - OFF: the SPI is off and cannot accept a request.
- INVAL: the length value is 0, or one of the buffers passed has length 0.
- RESERVE: there is no client for a callback.
SIZE: one of the buffers passed is smaller thanlen:lenbytes cannot be transferred.- FAIL: some other failure condition.
The set_client method sets which callback to invoke when a
read_write_bytes call completes. The read_write_done callback MUST
return the buffers passed in the call to read_write_bytes. The len
argument is the number of bytes read/written. The status argument
indicates whether the SPI operation completed successfully. It may
return any of the ErrorCode values that can be returned by
read_write_bytes: these represent asynchronous errors (e.g., due to
queueing).
The ControllerDevice trait combines Controller and Configure
traits. It provides the abstraction of being able to read/write to
the bus and adjust its configuration.
#![allow(unused)] fn main() { pub trait ControllerDevice<'a>: Controller<'a> + Configure<'a> {} }
4 ChipSelect and ControllerBus
The ChipSelect trait allows a client to change which chip select is
active on the SPI bus. Because different SPI hardware can provide
different numbers of chip selects, the actual chip select value is an
associated type. This associated type is typically an enum so a chip
implementation can statically verify that clients pass only valid chip
select values.
#![allow(unused)] fn main() { pub trait ChipSelect { type Value: Copy; fn set_chip_select(&self, cs: Self::Value) -> Result<(), ErrorCode>; fn get_chip_select(&self) -> Self::Value); } }
The ControllerBus trait combines ControllerDevice and ChipSelect
to provide the full abstraction of a SPI bus. It is the trait that
chip SPI implementations provide. In addition to ControllerDevice
and ChipSelect, ControllerBus includes an init method. This
init method initializes the hardware to be a SPI controller and is
typically called at boot.
#![allow(unused)] fn main() { pub trait ControllerBus<'a>: ControllerDevice<'a> + ChipSelect { fn init(&self) -> Result<(), ErrorCode>; } }
The Err result of init can return the following ErrorCode values:
- OFF: not currently powered so can't be initialized.
- RESERVE: no clock is configured yet.
- FAIL: other failure condition.
A client using a ControllerBus can exchange data with multiple SPI
peripherals, switching between them with ChipSelect. Calls to
Configure modify the configuration of the current chip select, which
are stateful. Changing the chip select uses the last configuration
set for that chip select. For example,
#![allow(unused)] fn main() { bus.set_chip_select(1); bus.set_phase(SampleLeading); bus.set_chip_select(2); bus.set_phase(SampleTrailing); bus.set_chip_select(1); bus.read_write_bytes(...); // Uses SampleLeading }
will have a SampleLeading phase in the final write_byte_bytes call,
because the configuration of chip select 1 is saved, and restored when
chip select is set back to 1.
5 Peripheral and PeripheralClient traits
When a chip acts as a SPI peripheral, it does not drive the
clock. Instead, it response to the clock of the controller. In some
cases, the peripheral must be able to respond with a bit of data
before it has even received one (e.g., if phase is set to
SampleLeading). As a result, a peripheral read/write request may
never complete if the controller never issues a request of its
own. The peripheral has to provide read and write buffers in
anticipation of a controller request. Unlike a controller, which must
always write data, a peripheral can only read, only write, or read and
write.
#![allow(unused)] fn main() { pub trait Peripheral { fn set_client(&self, client: &'static dyn PeripheralClient); fn read_write_bytes(&self, write_buffer: Option<&'static mut [u8]>, read_buffer: Option<&'static mut [u8]>, len: usize,) -> Result< (), (ErrorCode, Option<&'static mut [u8]>, Option<&'static mut [u8]>, ), >; fn set_write_byte(&self, write_byte: u8); } pub trait PeripheralClient { fn chip_selected(&self); fn read_write_done( &self, write_buffer: Option<&'static mut [u8]>, read_buffer: Option<&'static mut [u8]>, len: usize, status: Result<(), ErrorCode>, ); } }
The Peripheral API differs from the Controller in three ways:
read_write_byteshas an optional write buffer,- clients have a
chip_selectedcallback, and - a peripheral can set its write as a single-byte value.
When a controller brings the chip select line low, the implementation
calls the chip_selected callback to inform the peripheral that an
operation is starting. Because a controller may begin clocking data
almost immediately after the chip select is brought low (e.g., a SPI
clock tick, so in some cases a few hundred nanoseconds. Because this
is faster than the chip_selected callback can typically be issued,
the client SHOULD have already made a read_write_bytes or
set_write_byte call, so the SPI hardware has a byte ready to send.
The set_write_byte call sets the byte that the SPI peripheral should
write to the controller. The peripheral will write this byte on each
SPI byte operation until the next call to set_write_byte or
read_write_bytes with a write buffer argument.
The read_write_bytes method takes two Option types: one for the
write buffer and one for the read buffer. The SPI peripheral will read
bytes written by the controller into the read buffer, and will write
out the bytes in the write buffer to the controller. If no write
buffer is provided, the bytes the peripheral will write are
undefined. If read_write_bytes returns Ok(()), the request was
accepted and the implementation MUST issue a callback when the request
completes or has an error. The valid ErrorCode values for
read_write_bytes are:
- BUSY: the SPI is busy with another call to
read_write_bytesand so cannot complete the request. - OFF: the SPI is off and cannot accept a request.
- INVAL: the
lenparameter was 0 or both buffers wereNone. - RESERVE: there is no client for a callback.
- SIZE: one of the passed buffers is smaller than
len.
The read_write_done callback is called when the outstanding
read_write_bytes request completes. The len argument is how many
bytes were read/written. It may differ from the len passed to
read_write_bytes if one of the buffers is is shorter, or if an error
occured. It may return any of the ErrorCode values that can be
returned by read_write_bytes: these represent asynchronous errors
(e.g., due to arbitration).
6 PeripheralDevice and PeripheralBus traits
The PeripheralDevice trait represents the standard client
abstraction of a SPI peripheral. It combines Peripheral and
Configure:
#![allow(unused)] fn main() { pub trait PeripheralDevice<'a>: Peripheral<'a> + Configure {} }
PeripheralBus represents the lowest-level hardware abstraction of a
SPI peripheral. It is the trait that chip implementations typically
implement. It is PeripheralDevice plus an init() method for
initializing hardware to be a SPI peripheral:
#![allow(unused)] fn main() { pub trait PeripheralBus<'a>: PeripheralDevice<'a> { fn init(&self) -> Result<(), ErrorCode>; } }
The Err result of init can return the following ErrorCode values:
- OFF: not currently powered so can't be initialized.
- FAIL: other failure condition.
7 Bus trait
The ControllerBus and PeripheralBus traits are intended for use
cases when a given SPI block is always used as either or a controller
or always used as a peripheral. Some systems, however, require the bus
to change between these roles. For example, a board might export the
bus over an expansion header, and whether it behaves as a peripheral
or controller depends on what it's plugged into and which userspace
processes run.
The Bus trait allows software to dynamically change a SPI bus
between controller and peripheral mode.
#![allow(unused)] fn main() { pub trait Bus<'a>: PeripheralDevice<'a> + ControllerBus<'a> { fn make_controller(&self) -> Result<(), ErrorCode>; fn make_peripheral(&self) -> Result<(), ErrorCode>; fn is_controller(&self) -> bool; fn is_peripheral(&self) -> bool; } }
If software invokes a Peripheral operation while the bus is in
controller mode, the method MUST return OFF. If software invokes a
Controller operation while the bus is in peripheral mode, the method
MUST return off. Changing the controller chip select while the device
is in peripheral mode changes the chip select configuration of the
controller but MUST NOT have an effect on peripheral mode.
When a Bus first starts and is initialized, it MUST be in controller
mode, as the init() method is part of the ControllerBus trait.
8 Capsules
This section describes the standard Tock capsules for SPI communication.
9 Implementation Considerations
10 Authors' Address
Philip Levis
409 Gates Hall
Stanford University
Stanford, CA 94305
USA
pal@cs.stanford.edu
Alexandru Radovici <msg4alex@gmail.com>
Application Persistent Data Storage Permissions
TRD:
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Brad Campbell
Draft-Created: 2024/06/06
Draft-Modified: 2024/06/06
Draft-Version: 1
Draft-Discuss: devel@lists.tockos.org
Abstract
Tock supports storing persistent state for applications, and all persistent state in Tock is identified based on the application that stored it. Tock supports permissions for persistent state, allowing for the kernel to restrict which applications can store state and which applications can read stored state. This TRD describes the permissions architecture for persistent state in Tock. This document is in full compliance with TRD1.
1 Introduction
Tock applications need to be able to store persistent state. Additionally, applications need to be able to keep data private from other applications. The kernel should also be able to allow specific applications to read and modify state from other applications.
This requires a method for assigning applications persistent identifiers, a mechanism for granting storage permissions to specific applications, and kernel abstractions for implementing storage capsules that respect the storage permissions.
2 Scope
This document only describes the permission architecture in Tock for supporting application persistent storage. This document does not prescribe specific types of persistent storage (e.g., flash, FRAM, etc.), storage access abstractions (e.g., block-access, byte-access, etc.), or storage interfaces (e.g., key-value, filesystems, logs, etc.).
3 Stored State Identifiers
All shared persistent storage implementations must store a 32 bit identifier with each stored object to mark the application that created the stored object.
When applications write data, their ShortId must be used as the identifier. When the kernel writes data, the identifier must be 0.
The security, uniqueness, mapping policy, and other properties of ShortIds are allowed to vary based on board configuration. For storage use cases which have specific concerns or constraints around the policies for storage identifiers, users should consult the properties of ShortIds afforded by AppId policy.
4 Permissions
All persistent application data is labeled based on the application which wrote the data. Applications can read and modify data with suitable permissions.
There are three types of permissions:
- Write: The application can write data.
- Read: The application can read data.
- Modify: The application can modify existing data.
Each permission type is independent. For example, an application can be given read permission for specific data but not be able to write new data itself.
Write is a boolean permission. An application either has permission to write or it does not.
Read and Modify permissions are tuples of (the permission type, stored state identifier). These permissions only exist as associated with a particular
stored state identifier. That is, a Read permission gives an application
permission to read only stored state marked with the associated stored state
identifier, and a Modify permission gives an application permission to modify
only stored state marked with the associated stored state identifier.
5 Requirements
The Tock storage model imposes the following requirements:
- Applications are given separate write, read, and modify permissions.
- The label stored with the persistent data when the data are written is the application's short AppID.
- Applications without a
ShortId::Fixedcannot access (i.e., read/write/modify) any persistent storage. - How permissions are mapped to applications must be customizable for different Tock kernels.
Additionally, the kernel itself can be given permission to store state.
5.1 ShortId Implications
As all persistent state written by applications is marked with the writing application's ShortId, the assignment mechanism for ShortIds is tightly coupled with the access policies for persistent state. This coupling is intentional as AppIDs are unique to specific applications. However, as ShortIds are only 32 bits, it is not possible to assign a globally unique ShortId to all applications. Therefore, board authors should be intentional with how ShortIds are assigned when persistent storage is accessible to userspace.
In particular, two potentially problematic cases can arise:
- A ShortId is re-used for different applications. This might happen if one application is discontinued and a new application is assigned the same ShortId. The new application would then have unconditional access to any state the old application stored.
- A new ShortId is used for the same application. This might happen if the ShortId assignment algorithm changes. The same application then would lose access to data it previously stored.
6 Kernel Enforcement
It is not feasible to implement all persistent storage APIs through the core kernel (i.e., in trusted code). Instead, the kernel provides an API to retrieve the storage permissions for a specific process. Capsules then use these permissions to enforce restrictions on storage access. The API consists of these functions:
#![allow(unused)] fn main() { /// Check if these storage permissions grant read access to the stored state /// marked with identifier `stored_id`. pub fn check_read_permission(&self, stored_id: u32) -> bool; /// Check if these storage permissions grant modify access to the stored /// state marked with identifier `stored_id`. pub fn check_modify_permission(&self, stored_id: u32) -> bool; /// Retrieve the identifier to use when storing state, if the application /// has permission to write. Returns `None` if the application cannot write. pub fn get_write_id(&self) -> Option<u32>; }
This API is implemented for the StoragePermissions object.
The StoragePermissions type can be stored per-process and passed in
storage APIs to express the storage permissions of the caller of any storage
operations.
6.1 Using Permissions in Capsules
When writing storage capsules, capsule authors should include APIs which include
StoragePermissions as an argument, and should check for permission before
performing any storage operation.
For example, a filing cabinet abstraction that identifies stored state based on a record name might have an (asynchronous) API like this:
#![allow(unused)] fn main() { pub trait FilingCabinet { fn read(&self, record: &str, permissions: StoragePermissions) -> Result<(), ErrorCode>; fn write(&self, record: &str, data: &[u8], permissions: StoragePermissions) -> Result<(), ErrorCode>; } }
Inside the implementation for any storage abstraction, the implementation must consider three operations and check for permissions:
- The operation is a read. If there is no stored state that matches the
read request, the capsule should return
ErrorCode::NOSUPPORT. If there is stored state that matches the request, the capsule must callStoragePermissions::check_read_permission(stored_id)with the identifier associated with the stored record. Ifcheck_read_permission()returns false, the capsule should returnErrorCode::NOSUPPORT. Ifcheck_read_permission()returns true, the capsule should return the read data. - The operation is a write, and the write would store new data. The
capsule must call
StoragePermissions::get_write_id(). Ifget_write_id()returnsNone, the capsule should returnErrorCode::NOSUPPORT. Ifget_write_id()returnsSome(), the capsule should save the new data and must use the returnedu32identifier. It should then returnOk(()). - The operation is a write, and the write would overwrite existing
data. The capsule must first retrieve the storage identifier for the
existing state. The the capsule must call
StoragePermissions::check_modify_permission(stored_id). Ifcheck_modify_permission()returns false, the capsule should returnErrorCode::NOSUPPORT. Ifcheck_modify_permission()returns true, the capsule should overwrite the data while not changing this stored identifier. The capsule should then returnOk(()).
For example, with the filing cabinet example:
#![allow(unused)] fn main() { pub trait FilingCabinet { fn read(&self, record: &str, permissions: StoragePermissions) -> Result<[u8], ErrorCode> { let obj = self.cabinet.read(record); match obj { Some(r) => { if permissions.check_read_permission(r.id) { Ok(r.data) } else { Err(ErrorCode::NOSUPPORT) } } None => Err(ErrorCode::NOSUPPORT), } } fn write(&self, record: &str, data: &[u8], permissions: StoragePermissions) -> Result<(), ErrorCode> { let obj = self.cabinet.read(record); match obj { Some(r) => { if permissions.check_modify_permission(r.id) { self.cabinet.write(record, r.id, data); Ok(()) } else { Err(ErrorCode::NOSUPPORT) } } None => { match permissions.get_write_id() { Some(id) => { self.cabinet.write(record, id, data); Ok(()) } None => Err(ErrorCode::NOSUPPORT), } } } } } }
6.2 StoragePermissions Type
The kernel defines a StoragePermissions type which expresses the storage
permissions of an application. This is implemented as a definite type rather
than a trait interface so permissions can be passed in storage APIs without
requiring a static object for every process in the system.
The StoragePermissions type is capable of holding storage permissions in
different formats. In general, the type looks like:
#![allow(unused)] fn main() { pub struct StoragePermissions(StoragePermissionsPrivate); enum StoragePermissionsPrivate { SelfOnly(core::num::NonZeroU32), FixedSize(FixedSizePermissions), Listed(ListedPermissions), Kernel, Null, } }
Each variant is a different method for representing and storing storage
permissions. For example, FixedSize contains fixed size lists of permissions,
where as Null grants no storage permissions.
The StoragePermissions struct includes multiple constructors for instantiating
storage permissions. The struct wraps the enum to ensure that permissions can
only be created with those constructors. The constructors require a capability
to use so only trusted code can create storage permissions.
7 Specifying Permissions
Different users and different kernels will use different methods for determining the persistent storage access permissions for different applications (and by extensions the running process for that application). The following are some examples of how storage permissions may be specified.
- In TBF headers. The
StoragePermissionsTBF header allows a developer to specify storage permissions when the app is compiled. Using this method assumes the kernel can trust the application's headers, perhaps because the kernel only runs apps signed by a trusted party that has verified the TBF headers. - Within the kernel. The kernel can maintain a data structure of permissions for known applications. This should be coupled with the AppID mechanism to consistently assign storage permissions to applications based on their persistent identifier.
- With a generic policy. The kernel may permit all applications with a fixed ShortId to use persistent storage. This method can isolate applications by only permitting read and modify access to state stored by the same application.
7.1 Assigning Permissions to Processes
The core kernel allows individual boards to configure how permissions are
assigned to applications. At runtime, the kernel needs to know what permissions
each executing process has. To facilitate this, Tock uses the
ProcessStandardStoragePermissionsPolicy process policy. Each process, when created,
will store a StoragePermissions object that specifies the storage permissions for
that process.
#![allow(unused)] fn main() { /// Generic trait for implementing a policy on how applications should be /// assigned storage permissions. pub trait ProcessStandardStoragePermissionsPolicy<C: Chip> { /// Return the storage permissions for the specified `process`. fn get_permissions(&self, process: &ProcessStandard<C>) -> StoragePermissions; } }
This trait is specific to the ProcessStandard implementation of Process to
enable policies to use TBF headers when assigning permissions.
Several examples of policies are in the capsules/system crate.
8 Storage Examples
The permissions architecture is generic for storage in Tock, but this section describes some examples of how this architecture may be used for several storage abstractions. Note, these are just examples and not descriptions of actual Tock implementations nor requirements for how various storage abstractions must be implemented.
- Key-Value storage. Each key-value pair is stored as a triple: (key, value,
storage identifier). On
get(), the storage identifier for the key-value pair is checked. Onset(), if the key already exists the modify permission is used, and if the key does not exist the write permission is used. - Logging. Loggers append to a shared log. Loggers can only append to the log if the have the write permission. Each log entry includes the storage identifier of the writing logger. Loggers do not have any read permission. Log analyzers only have read permissions. The analyzers have multiple read permissions to the log entries they need to analyze. The modify permission is not used.
- Per-application nonvolatile storage. Each application is given a region of nonvolatile storage. Applications only access their own storage region. The storage implementation still checks and enforces read, write, and modify permissions, but the expectation is that applications that have the write permission also have modify and read permissions for their own stored state. There is no API for accessing other application state, so maintaining lists of read/modify permissions is not necessary.
- Global persistent configuration. The storage abstraction maintains a persistent data store that multiple applications use. Only one application is expected to have the write permission to initialize the configuration. Other applications that use the configuration have read permission for the initializing application's storage identifier, and may have modify permission if they need to update the configuration.
8 Authors' Addresses
Brad Campbell <bradjc@virginia.edu>
Universal Asynchronous Receiver Transmitter (UART) HIL
TRD:
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Philip Levis, Leon Schuermann
Draft-Created: August 5, 2021
Draft-Modified: June 5, 2022
Draft-Version: 5
Draft-Discuss: devel@lists.tockos.org
Abstract
This document describes the hardware independent layer interface (HIL) for UARTs (serial ports) in the Tock operating system kernel. It describes the Rust traits and other definitions for this service as well as the reasoning behind them. This document is in full compliance with TRD1. The UART HIL in this document also adheres to the rules in the HIL Design Guide, which requires all callbacks to be asynchronous -- even if they could be synchronous.
1 Introduction
A serial port (UART) is a basic communication interface that Tock relies on for debugging and interactive applications. Unlike the SPI and I2C buses, which have a clock line, UART communication is asynchronous. This allows it to require only one pin for each direction of communication, but limits its speed as clock drift between the two sides can cause bits to be read incorrectly.
The UART HIL is in the kernel crate, in module hil::uart. It provides five
main traits:
kernel::hil::uart::Configuration: allows a client to query how a UART is configured.kernel::hil::uart::Configure: allows a client to configure a UART, setting its speed, character width, parity, and stop bit configuration.kernel::hil::uart::Transmit: is for transmitting data.kernel::hil::uart::TransmitClient: is for handling callbacks when a data transmission is complete.kernel::hil::uart::Receive: is for receiving data.kernel::hil::time::ReceiveClient: handles callbacks when data is received.
There are also collections of traits that combine these into more
complete abstractions. For example, the Uart trait represents a
complete UART, extending Transmit, Receive, and Configure.
To provide a level of minimal platform independence, a port of Tock to a given microcontoller is expected to implement certain instances of these traits. This allows, for example, debug output and panic dumps to work across chips and platforms.
This document describes these traits, their semantics, and the
instances that a Tock chip is expected to implement. It also describes
how the virtual_uart capsule allows multiple clients to share a
UART. This document assumes familiarity with serial ports and their
framing: Wikipedia's article on asynchronous serial
communication
is a good reference.
2 Configuration and Configure
The Configuration trait allows a client to query how a UART is
configured. The Configure trait allows a client to configure a UART,
by setting is baud date, character width, parity, stop bits, and whether
hardware flow control is enabled.
These two traits are separate because there are cases when clients need to know the configuration but cannot set it. For example, when a UART is virtualized across multiple clients (e.g., so multiple sources can write to the console), individual clients may want to check the baud rate. However, they cannot set the baud rate, because that is fixed and shared across all of them. Similarly, some services may need to be able to set the UART configuration but do not need to check it.
Most devices using serial ports today use 8-bit data, but some older
devices use more or fewer bits, and hardware implementations support
this. If the character width of a UART is set to less than 8 bits, data is
still partitioned into bytes, and the UART sends the least significant
bits of each byte. Suppose a UART is configured to send 7-bit
words. If a client sends 5 bytes, the UART will send 35 bits,
transmitting the bottom 7 bits of each byte. The most significant bit
of each byte is ignored. While this HIL does support UART transfers
with a character-width of more than 8-bit, such characters cannot be
sent or received using the provided bulk transfer mechanisms. A
configuration with Width > 8 will disable the bulk buffer transfer
mechanisms and restrict the device to single-character
operations. Refer to 3 Transmit and TransmitClient
and 4 Receive and ReceiveClient
respectively.
Any configuration-change must not apply to operations started before
this change. The UART implementation is free to accept a configuration
change and apply it with the next operation, or refuse an otherwise
valid configuration request because of an ongoing operation by
returning ErrorCode::BUSY.
#![allow(unused)] fn main() { pub enum StopBits { One = 1, Two = 2, } pub enum Parity { None = 0, Odd = 1, Even = 2, } pub enum Width { Six = 6, Seven = 7, Eight = 8, Nine = 9, } pub struct Parameters { pub baud_rate: u32, // baud rate in bit/s pub width: Width, pub parity: Parity, pub stop_bits: StopBits, pub hw_flow_control: bool, } pub trait Configuration { fn get_baud_rate(&self) -> u32; fn get_width(&self) -> Width; fn get_parity(&self) -> Parity; fn get_stop_bits(&self) -> StopBits; fn get_hw_flow_control(&self) -> bool; fn get_configuration(&self) -> Configuration; } pub trait Configure { fn set_baud_rate(&self, rate: u32) -> Result<u32, ErrorCode>; fn set_width(&self, width: Width) -> Result<(), ErrorCode>; fn set_parity(&self, parity: Parity) -> Result<(), ErrorCode>; fn set_stop_bits(&self, stop: StopBits) -> Result<(), ErrorCode>; fn set_hw_flow_control(&self, on: bool) -> Result<(), ErrorCode>; fn configure(&self, params: Parameters) -> Result<(), ErrorCode>; } }
Methods in Configure can return the following error conditions:
OFF: The underlying hardware is currently not available, perhaps because it has not been initialized or in the case of a shared hardware USART controller because it is set up for SPI.INVAL: Baud rate was set to 0.NOSUPPORT: The underlying UART cannot satisfy this configuration.BUSY: The UART is currently busy processing an operation which would be affected by a change of the respective parameter.FAIL: Other failure condition.
Configuration::get_configuration can be used to retrieve a copy of
the current UART configuration, which can later be restored using the
Configure::configure method. An implementation of the
Configure::configure method must ensure that this configuration is
applied atomically: either the configuration described by the passed
Parameters is applied in its entirety or the device's configuration
shall remain unchanged, with the respective check's error returned.
The UART may be unable to set the precise baud rate specified. For
example, the UART may be driven off a fixed clock with integer
prescalar. An implementation of configure MUST set the baud rate to
the closest possible value to the baud_rate field of the params
argument and an an implementation of set_baud_rate MUST set the baud
rate to the closest possible value to the rate argument. The Ok
result of set_baud_rate includes the actual rate set, while an
Err(INVAL) result means the requested rate is well outside the
operating speed of the UART (e.g., 16MHz).
3 Transmit and TransmitClient
The Transmit and TransmitClient traits allow a client to transmit
over the UART.
#![allow(unused)] fn main() { enum AbortResult { Callback(bool), NoCallback, } pub trait Transmit<'a> { fn set_transmit_client(&self, client: &'a dyn TransmitClient); fn transmit_buffer( &self, tx_buffer: &'static mut [u8], tx_len: usize, ) -> Result<(), (ErrorCode, &'static mut [u8])>; fn transmit_character(&self, character: u32) -> Result<(), ErrorCode>; fn transmit_abort(&self) -> AbortResult; } pub trait TransmitClient { fn transmitted_character(&self, rval: Result<(), ErrorCode>) {} fn transmitted_buffer( &self, tx_buffer: &'static mut [u8], tx_len: usize, rval: Result<(), ErrorCode>, ); } }
The Transmit trait has two data paths: transmit_character and
transmit_buffer. The transmit_character method is used in narrow
use cases in which buffer management is not needed or when the client
transmits 9-bit characters. Generally, software should use the
transmit_buffer method. Most software implementations use DMA, such
that a call to transmit_buffer triggers a single interrupt when the
transfer completes; this saves energy and CPU cycles over per-byte
transfers and also improves transfer speeds because hardware can keep
the UART busy.
Each u32 passed to transmit_character is a single UART character.
The UART MUST ignore then high order bits of the u32 that are
outside the current character width. For example, if the UART is
configured to use 9-bit characters, it must ignore bits 31-9: if the
client passes 0xffffffff, the UART will transmit 0x1ff.
Each byte transmitted with transmit_buffer is a UART character. If
the UART is using 8-bit characters, each character is a byte. If the
UART is using smaller characters, it MUST ignore the high order bits
of the bytes passed in the buffer. For example, if the UART is using
6-bit characters and is told to transmit 0xff, it will transmit
0x3f, ignoring the first two bits.
If a client needs to transmit characters larger than 8 bits, it should
use transmit_character, as transmit_buffer is a buffer of 8-bit
bytes and cannot store 9-bit values. If the UART is configured to use
characters wider than 8-bit, the transmit_buffer operation is
disabled and calls to it must return ErrorCode::INVAL.
There can be a single transmit operation ongoing at any
time. Successfully calling either transmit_buffer or
transmit_character causes the UART to become busy until it issues
the callback corresponding to the outstanding operation.
3.1 transmit_buffer and transmitted_buffer
Transmit::transmit_buffer sends a buffer of data. The result
returned by transmit_buffer indicates whether there will be a
callback in the future. If transmit_buffer returns Ok(()),
implementation MUST call the TransmitClient::transmitted_buffer
callback in the future when the transmission completes or fails. If
transmit_buffer returns Err it MUST NOT issue a callback in the
future in response to this call. If the error is BUSY, this is
because there is an outstanding call to transmit_buffer or
transmit_character: the implementation will continue to handle
the original call and issue the originally scheduled callback
(as if the call that Err'd with BUSY never happened). However,
it does not issue a callback for the call to transmit_buffer
that returned Err.
The valid error codes for transmit_buffer are:
OFF: the underlying hardware is not available, perhaps because it has not been initialized or has been initialized into a different mode (e.g., a USART has been configured to be a SPI).BUSY: the UART is already transmitting and has not made a transmission complete callback yet.SIZE:tx_lenis larger than the passed slice ortx_len == 0.INVAL: the device is configured for data widths larger than 8-bit.FAIL: some other failure.
Calling transmit_buffer while there is an outstanding
transmit_buffer or transmit_character operation MUST return Err(BUSY).
The TransmitClient::transmitted_buffer callback indicates completion
of a buffer transmission. The Result indicates whether the buffer
was successfully transmitted. The tx_len argument specifies how
many characters (defined by Configure) were transmitted. If the
rval of transmitted_buffer is Ok(()), tx_len MUST be equal to
the size of the transmission started by transmit_buffer, defined
above. A call to transmit_character or transmit_buffer made within
this callback MUST NOT return Err(BUSY) unless it is because this is
not the first call to one of these methods in the callback. When this
callback is made, the UART MUST be ready to receive another call. The
valid ErrorCode values for transmitted_buffer are all of those
returned by transmit_buffer plus:
CANCELif the call totransmit_bufferwas cancelled by a call toabortand the entire buffer was not transmitted.SIZEif the buffer could only be partially transmitted.
3.2 transmit_character and transmitted_character
The transmit_character method transmits a single character of data
asynchronously. The word length is determined by the UART
configuration. A UART implementation MAY choose to not implement
transmit_character and transmitted_character. There is a default
implementation of transmitted_character so clients that do not use
receive_character do not have to implement a callback.
If transmit_character returns Ok(()), the implementation MUST call the
transmitted_character callback in the future. If a call to
transmit_character returns Err, the implementation MUST NOT issue a
callback for this call, although if the it is Err(BUSY) is will
issue a callback for the outstanding operation. Valid ErrorCode
results for transmit_character are:
OFF: The underlying hardware is not available, perhaps because it has not been initialized or in the case of a shared hardware USART controller because it is set up for SPI.BUSY: the UART is already transmitting and has not made a transmission callback yet.NOSUPPORT: the implementation does not supporttransmit_characteroperations.FAIL: some other error.
The TransmitClient::transmitted_character method indicates that a single
word transmission completed. The Result indicates whether the word
was successfully transmitted. A call to transmit_character or
transmit_buffer made within this callback MUST NOT return BUSY
unless it is because this is not the first call to one of these
methods in the callback. When this callback is made, the UART MUST be
ready to receive another call. The valid ErrorCode values for
transmitted_character are all of those returned by transmit_character plus:
CANCELif the call totransmit_characterwas cancelled by a call toabortand the word was not transmitted.
3.3 transmit_abort
The transmit_abort method allows a UART implementation to terminate
an outstanding call to transmit_character or transmit_buffer early. The
result of transmit_abort indicates two things:
- whether a callback will occur (there is an oustanding operation), and
- if a callback will occur, whether the operation is cancelled.
If transmit_abort returns Callback, there will be be a future
callback for the completion of the outstanding request. If there is
an outstanding transmit_buffer or transmit_character operation,
transmit_abort MUST return Callback. If there is no outstanding
transmit_buffer or transmit_abort operation, transmit_abort MUST
return NoCallback.
The three possible values of AbortResult have these meanings:
Callback(true): there was an outstanding operation, which is now cancelled. A callback will be made for that operation with anErrorCodeofCANCEL.Callback(false): there was an outstanding operation, which has not been cancelled. A callback will be made for that operation with a result other thanErr(CANCEL).NoCallback: there was no outstanding request and there will be no future callback.
Note that the semantics of the boolean field in
AbortResult::Callback refer to whether the operation is cancelled,
not whether this particular call cancelled it: a true result
indicates that there will be an ErrorCode::CANCEL in the
callback. Therefore, if a client calls transmit_abort twice and the
first call returns Callback(true), the second call's return value of
Callback(true) can involve no state transition within the sender, as
it simply reports the curent state (of the call being cancelled).
4 Receive and ReceiveClient traits
The Receive and ReceiveClient traits are used to receive data from the
UART. They support both single-word and buffer reception. Buffer-based
reception is more efficient, as it allows an MCU to handle only one
interrupt for many characters. However, buffer-based reception only supports
characters of 6, 7, and 8 bits, so clients using 9-bit words need to use
word operations. If the UART is configured to use characters wider
than 8-bit, the receive_buffer operation is disabled and calls to
it must return ErrorCode::INVAL.
Each byte received is a character for the UART. If the UART is using
8-bit characters, each character is a byte. If the UART is using
smaller characters, it MUST zero the high order bits of the data
values. For example, if the UART is using 6-bit characters and
receives 0x1f, it must store 0x1f in a byte and not set high order
bits. If the UART is using 9-bit words and receives 0x1ea, it
stores this in a 32-bit value for receive_character as 0x000001ea.
Receive supports a single outstanding receive request. A successful
call to receive_buffer or receive_character causes UART reception to be
busy until the callback for the outstanding operation is issued.
If the UART returns Ok to a call to receive_buffer or
receive_character, it MUST return Err(BUSY) to subsequent calls to
those methods until it issues the callback corresponding to the
outstanding operation. The first call to receive_buffer or
receive_character from within a receive callback MUST NOT return
Err(BUSY): when it makes a callback, a UART must be ready to handle
another reception request.
#![allow(unused)] fn main() { enum AbortResult { Failure, Success, } pub trait Receive<'a> { fn set_receive_client(&self, client: &'a dyn ReceiveClient); fn receive_buffer( &self, rx_buffer: &'static mut [u8], rx_len: usize, ) -> Result<(), (ErrorCode, &'static mut [u8])>; fn receive_character(&self) -> Result<(), ErrorCode>; fn receive_abort(&self) -> AbortResult; } pub trait ReceiveClient { fn received_character(&self, _character: u32, _rval: Result<(), ErrorCode>, _error: Error) {} fn received_buffer( &self, rx_buffer: &'static mut [u8], rx_len: usize, rval: Result<(), ErrorCode>, error: Error, ); } }
4.1 receive_buffer, received_buffer and receive_abort
The receive_buffer method receives from the UART into the passed
buffer. It receives up to rx_len bytes. When rx_len bytes has
been received, the implementation MUST call the received_buffer
callback to signal reception completion with an rval of
Ok(()). The implementation MAY call the received_buffer callback
before all rx_len bytes have been received. If it calls the
received_buffer callback before all rx_len bytes have been
received, rval MUST be Err. Valid return values for
receive_buffer are:
OFF: the underlying hardware is not available, because it has not been initialized or is configured in a way that does not allow UART communication (e.g., a USART is configured to be SPI).BUSY: the UART is already receiving (a buffer or a word) and has not made a receptionreceivedcallback yet.SIZE:rx_lenis larger than the passed slice orrx_len == 0.INVAL: the device is configured for data widths larger than 8-bit.
The receive_abort method can be used to cancel an outstanding buffer
reception call. If there is an outstanding buffer reception, calling
receive_abort MUST terminate the reception as early as possible,
possibly completing it before all of the requested bytes have been
read. In this case, the implementation MUST issue a received_buffer
callback reporting the number of bytes actually read and with an
rval of Err(CANCEL).
Reception early termination is necessary for UART virtualization. For
example, suppose there are two UART clients. The first issues a read
of 80 bytes. After 20 bytes have been read, the second client issues
a read of 40 bytes. At this point, the virtualizer has to reduce the
length of its outstanding read, from 60 (80-20) to 40 bytes. It needs
to copy the 20 bytes read into the first client's buffer, the next 40
bytes into both of their buffers, and the last 20 bytes read into the
first client's buffer. It accomplishes this by calling receive_abort
to terminate the 100-byte read, copying the bytes read from the
resulting callback, then issuing a receive_buffer of 40 bytes.
The valid return values for receive_abort are:
Callback(true): there was a reception outstanding and it has been cancelled. A callback withErr(CANCEL)will be called.Callback(false): there was a reception outstanding but it was not cancelled. A callback will be called with anrvalother thanErr(CANCEL).NoCallback: there was no reception outstanding and the implementation will not issue a callback.
If there is no outstanding call to receive_buffer or
receive_character, receive_abort MUST return NoCallback.
4.2 receive_character and received_character
The receive_character method and received_character callback allow
a client to perform character operations without buffer
management. They receive a single UART character, where the character width
is defined by the UART configuration and can be wider than 8
bits.
A UART implementation MAY choose to not implement receive_character and
received_character. There is a default implementation of received_character
so clients that do not use receive_character do not have to implement a
callback.
If the UART returns Ok(()) to a call to receive_character, it MUST make
a received_character callback in the future, when it receives a character
or some error occurs. Valid Err values of receive_character are:
BUSY: the UART is busy with an outstanding call toreceive_bufferorreceive_character.OFF: the UART is powered down or in a configuration that does not allow UART reception (e.g., it is a USART in SPI mode).NOSUPPORT:receive_characteroperations are not supported.FAIL: some other error.
5 Composite Traits
In addition to the 6 basic traits, the UART HIL defines several traits that use these basic traits as supertraits. These composite traits allow structures to refer to multiple pieces of UART functionality with a single reference and ensure that their implementations are coupled.
#![allow(unused)] fn main() { pub trait Uart<'a>: Configure + Configuration + Transmit<'a> + Receive<'a> {} pub trait UartData<'a>: Transmit<'a> + Receive<'a> {} pub trait Client: ReceiveClient + TransmitClient {} }
The HIL provides blanket implementations of these four traits: any structure that implements the supertraits of a composite trait will automatically implement the composite trait.
6 Capsules
The Tock kernel provides two standard capsules for UARTs:
capsules::console::Consoleprovides a userspace abstraction of a console. It allows userspace to print to and read from a serial port through a system call API.capsules::virtual_uartprovides a set of abstractions for virtualizing a single UART into many UARTs.
The structures in capsules::virtual_uart allow multiple clients to
read from and write to a serial port. Write operations are interleaved
at the granularity of transmit_buffer calls: each client's
transmit_buffer call is printed contiguously, but consecutive calls
to transmit_buffer from a single client may have other data inserted
between them. When a client calls receive_buffer, it starts reading
data from the serial port at that point in time, for the length of its
request. If multiple clients make receive_buffer calls that overlap
with one another, they each receive copies of the received data.
Suppose, for example, that there are two clients. One of them calls
receive_buffer for 8 bytes. A user starts typing "1234567890" at the
console. After the third byte, another client calls receive_buffer
for 4 bytes. After the user types "7", the second client will receive
a received_buffer callback with a buffer containing "4567". After
the user types "8", the first client will receive a callback with a
buffer containing "12345678". If the second client then calls
receive_buffer with a 1-byte buffer, it will receive "9". It never
sees "8", since that has been consumed by the time it makes this
second receive call.
7 Authors' Address
Philip Levis
409 Gates Hall
Stanford University
Stanford, CA 94305
USA
pal@cs.stanford.edu
Leon Schuermann <leon@is.currently.online>
Userspace Readable Allow System Call
TRD: XXX
Working Group: Kernel
Type: Documentary
Status: Draft
Author: Alistair Francis
Draft-Created: June 17, 2021
Draft-Modified: Sep 8, 2021
Draft-Version: 2
Draft-Discuss: devel@lists.tockos.org
Abstract
This document describes the userspace readable allow system call application binary interface (ABI) between user space processes and the Tock kernel for 32-bit ARM Cortex-M and RISC-V RV32I platforms.
This is an extension on the allow calls specified in TRD 104.
1 Introduction
In normal use, userspace does not access a buffer that has been userspace readable with the kernel with a Read-Write Allow call. This reading restriction is because the contents of the buffer may be in an intermediate state and so not consistent with expected data models. Ensuring every system call driver maintains consistency in the presence of arbitrary userspace reads is too great a programming burden for an unintended use case.
However, there can be cases when it is necessary for userspace to be able to read a buffer without first revoking it from the kernel with a Read-Write Allow. These cases are situations when the cost of a Read-Write Allow system call is an unacceptable overhead for accessing the data.
Instead, capsules that support the userspace readable allow call can communicate with applications without buffers needing to be re-allowed. For example a capsule might want to report statistics to a userspace app. It could do this by letting the app perform a userspace readable allow call to allocate a buffer. Then the capsule can write statistics to the buffer and at any time the app can read the statistics from the buffer.
The userspace readable allow system call allows userspace to have read-only access a buffer that is writeable by the kernel.
2 System Call API
2.1 Userspace Readable Allow (Class ID: 7)
The userspace readable allow syscall follows the same expectations and requirements as described for the Read-Write syscall in TRD104 Section 4.4, with the exception that apps are explicitly allowed to read buffers that have been passed to the kernel.
The register arguments for Userspace Readable Allow system calls are as follows. The registers r0-r3 correspond to r0-r3 on CortexM and a0-a3 on RISC-V.
| Argument | Register |
|---|---|
| Driver number | r0 |
| Buffer number | r1 |
| Address | r2 |
| Size | r3 |
The Tock kernel MUST check that the passed buffer is contained within
the calling process's writeable address space. Every byte of a passed
buffer must be readable and writeable by the process. Zero-length
buffers may therefore have arbitrary addresses. If the passed buffer is
not complete within the calling process's writeable address space, the
kernel MUST return a failure result with an error code of INVALID.
The buffer number specifies which buffer this is. A driver may
support multiple allowed buffers.
The return variants for Userspace Readable Allow system calls are Failure with 2 u32 and Success with 2 u32. In both cases, Argument 0
contains an address and Argument 1 contains a length. When a driver
implementing the Userspace Readable Allow system call returns a failure
result, it MUST return the same address and length as those that were passed
in the call. When a driver implementing the Userspace Readable Allow system call
returns a success result, the returned address and length MUST be those
that were passed in the previous call, unless this is the first call.
On the first successful invocation of a particular Userspace Readable Allow system
call, a driver implementation MUST return address 0 and size 0.
The syscall class ID is shown below:
| Syscall Class | Syscall Class Number |
|---|---|
| Userspace Readable Allow | 7 |
The standard access model for userspace readable allowed buffers is that userspace can read from a buffer while the kernel can read or write. Synchronisation methods are required to ensure data consistency but are implementation specific.
Simultaneous accesses to a buffer from both userspace and the kernel can cause userspace to read inconsistent data if not implemented properly. For example a userspace app could read partially written data. This would result in obscure timing bugs that are hard to detect. Due to this each capsule using the userspace readable allow mechanism MUST document, in a Draft or Final Documentary TRD, how it ensures userspace always reads consistent data from a userspace readable buffer.
Finally, because a process conceptually relinquishes write access to a buffer when it makes a userspace readable allow call with it, a userspace API MUST NOT assume or rely on a process writing an allowed buffer. If userspace needs to write to a buffer held by the kernel, it MUST first regain access to it by calling the corresponding Userspace Readable Allow. A userspace API MAY allow a process to read an allowed buffer, but if it does, it must document a consistency mechanism.
One example approach to ensure that userspace reads of a data object are consistent is to use a monotonic counter. Every time the kernel writes the data object, it increments the counter. If userspace reads the counter, reads the data object, then reads the counter again to check that it has not changed, it can check that the object was not modified mid-read. If the counter changes, it restarts the read of the data object. This approach is simple, but does make reading the data object take variable time and is theoretically vulnerable to starvation.
An example of reading a monotonic counter from userspace would look like this:
// Reference to the readable-allow'd buffer
volatile uint32_t* ptr;
do {
// Read the current counter value
counter = ptr[0];
// Read in the data
my_data0 = ptr[1];
my_data1 = ptr[2];
// Only exit the loop if counter and ptr[0] are the same
} while (counter != ptr[0]);
where the counter is incremented on every context switch to userspace.
3 libtock-c Userspace Library Methods
3.1 Userspace Readable Allow
The userspace readable allow system call class is how a userspace process shares a buffer with the kernel that the kernel can read and write.
The userspace readable allow system call has this function prototype:
typedef struct {
bool success;
void* ptr;
size_t size;
tock_error_t error;
} userspace_readable_allow_return_t;
userspace_readable_allow_return_t allow_userspace_readable(uint32_t driver, uint32_t allow, volatile void* ptr, size_t size);
The success field indicates whether the call succeeded.
If it failed, the error code is stored in error. If it succeeded,
the value in error is undefined. ptr and size contain the pointer
and size of the passed buffer.
The register arguments for Userspace Readable Allow system calls are as follows. The registers r0-r3 correspond to r0-r3 on CortexM and a0-a3 on RISC-V.
| Argument | Register |
|---|---|
| Driver number | r0 |
| Buffer number | r1 |
| Address | r2 |
| Size | r3 |
4 Author's Address
Alistair Francis alistair.francis@wdc.com